
基于 Arm 的处理器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
基于 TDA4x 处理器和 TI 边缘计算的自动代客泊车 (AVP) 演示
Loading the player...


手机看
收藏本课程
扫码用手机观看
-
 未学习 基于 TDA4x 处理器和 TI 边缘计算的自动代客泊车 (AVP) 演示
未学习 基于 TDA4x 处理器和 TI 边缘计算的自动代客泊车 (AVP) 演示
 视频简介
视频简介
基于 TDA4x 处理器和 TI 边缘计算的自动代客泊车 (AVP) 演示
所属课程:基于 TDA4x 处理器和 TI 边缘计算的自动代客泊车 (AVP) 演示
发布时间:2022.11.22
视频集数:1
本节视频时长:00:02:09
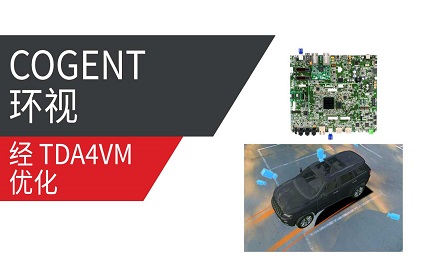
基于 TDA4x 处理器和 TI Edge AI 的自动代客泊车 (AVP) 演示为您的高级驾驶辅助系统 (ADAS) 提供参考。该演示基于 100 万像素摄像头的三个通道。通过内部集成的 ISP 和 DSP 对图像进行预处理后,传输到深度学习处理器的核心,根据三个摄像头的实时数据分别运行语义分割算法、车辆识别算法和停车位识别算法,然后标记对象并输出处理后的图像数据。结果可以通过多种格式输出显示,或者通过编码器保存视频并通过 CAN 输出控制汽车。

