
电机驱动
最新课程
- 利用EIS技术重新定义BMS的可能性
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
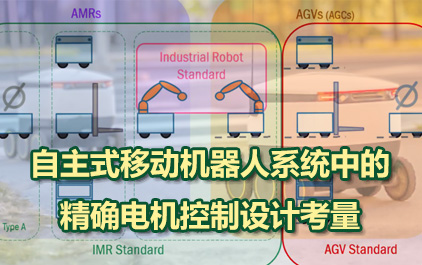
自主式移动机器人系统中的精确电机控制设计考量
Loading the player...

手机看
收藏本课程
扫码用手机观看
-
 未学习 自主式移动机器人系统中的精确电机控制设计考量
未学习 自主式移动机器人系统中的精确电机控制设计考量
 视频简介
视频简介
自主式移动机器人系统中的精确电机控制设计考量
所属课程:自主式移动机器人系统中的精确电机控制设计考量
发布时间:2022.06.08
视频集数:1
本节视频时长:00:47:17
工业移动机器人的设计主要以小型化,低成本以及安全性为考量目标。在视频将介绍TI的马达驱动系统方案,包括:
- 处理器(C2000™) 以及经TUV认证的功能安全手册,数据,软件库。
- 三相智能化门极驱动芯片(DRV83XX) 以及参考设计(TIDA-01629),和经TUV认证的功能安全数据。
- 超高精度电流采样运放INA241x。
帮助客户快速实现设计,减少物料、体积以及成本,加快产品功能安全认证进度。本课程主要包括:1.了解工业应用环境中各种不同类型的移动机器人。
2.深入了解驱使机器人移动的电机驱动子系统。
3. 探索移动机器人功能安全及相关标准,例如ISO3691-4。

