3.2 TI 高精度实验室-以太网:以太网 PHY 中的自举如何工作
Loading the player...
将在30s后自动为您播放下一课程
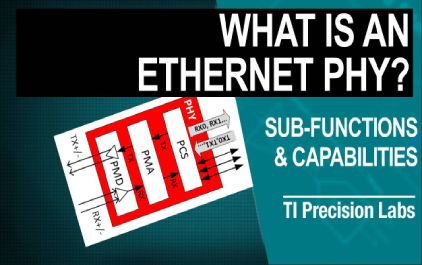
大家好,欢迎观看 TI 高精度实验室视频。 在本次课程中, 我们将专门 在以下主题中 讨论 TI 以太网 PHY 中的自举 -- 自举如何工作、 为何使用自举 来配置 PHY 以及 TI PHY 中实现的 自举类型。 有关 TI 以太网 器件如何工作的 复习内容,请观看 以太网系列中以前的 高精度实验室视频。 硬件自举是一种 通过使用硬件代替 固件或使用 硬件与固件 相结合的方法配置 集成电路的机制。 通常作为自举 提供可影响 PHY 形式或功能的 关键功能, 如 Mac 接口、自动 协商和数据速率, 该自举可 进行配置, 以防止产生未知的 设备状态或设备损坏。 在此处,您可以 看到一个示例自举 配置,用于将 TI PHY 设置为 RMII 主模式。 在整个视频中, 将更详细地 讨论不同的自举 配置和操作模式。 在 TI 以太网 PHY 中, 自举包含两级或四级。 此处显示的是一个 两级自举电路示例。 以太网 PHY 内部具有 内部上拉或下拉 电阻器和比较器。 自举引脚通常 是输出引脚。 不过,GPIO 用作加电 和复位的输入。 在此期间,内部 缓冲器的开关 断开,比较器的 开关闭合,比较器 对自举引脚上的 电位进行 采样。 该电位值确定 器件将设置为 何种模式。 一旦器件 成功加电 并设置了自举, 就会打开 比较器的 开关,关闭 缓冲器的开关, GPIO 充当输出。 在 TI 以太网 PHY 中,可以 通过寄存器写操作 来覆盖自举设置。 但在硬件复位后, PHY 将恢复为默认 自举设置。 在两级自举中,该引脚 被拉高至 VDDIO 或拉低 至接地。 两级之间的 大电位范围 可防止噪声、 电压摆幅或 其他因素导致 读取不正确的 工作模式,使您 放心 PHY 将以正确的 模式工作。 可以在器件 数据表的编程 部分中找到特定于 每个 TI PHY 的自举 电路信息。 两级自举电阻器 比率表显示了需要 针对每种工作模式 使用哪些电阻器。 可以按照 数据表的 说明来修改电阻器 Rhi 和 Rlo 的比率, 以通过更改引脚上的 电位来配置 PHY。 此处是 TI 以太网 PHY 数据表中可能显示的 一些自举表示例。 这些表显示了 将自举设置为 特定的模式会 影响哪些功能。 例如,自动负 自举表显示 RX_ER 引脚的 默认设置为 模式 0,从而启用了 自动 MDIX 功能。 要禁用自动 MDIX,需要使用 为模式一定义的 电阻器配置来 自举该引脚。 目标电压列描述了 使用 VDDIO 作为基准 将器件设置为每种 模式时自举引脚上 需要的电压电平。 VDDIO 用作 PHY 中 比较器的电源 电压。 因此,我们将目标 电压与该值进行 比较,以处理电源 电压的任何变化。 与两级自举 相反,四级自举 具有中间 电压电平。 这样可以实现 更多功能,从而 能够通过单个 引脚设置两项 功能,但需要更加 严格的组件选择。 对电阻器容差、 泄漏电流以及 其他影响组件 性能的因素的 要求更加严格。 数据表中 将提供每个 自举电平的 电压阈值, 如该示例所示。 请注意,在使用具有 引脚功能的四级自举 引脚时,必须 考虑所连接 器件的内极。 Mac 有时具有 内极,这会影响 自举电压。 需要相应地 调整外部自举 电阻器。 所有电阻器均应 使用建议的值, 容差为 1%。 请记住,在加电和复位时 对自举电压进行采样。 作为完整性检查, 您可以在保持器件的 同时测量自举 电压并复位, 以确认 PHY 会设置为 所需的工作模式。 在为不同的模式 设置自举时, 引脚的功能 可能会发生 变化,进而 需要更改 硬件设计。 请注意,MII 模式 和 RMII 主模式下 TI PHY 之间的自举配置 和功能模式有所不同。 在 RMII 主模式下, PHY 通过引脚 RX_D3 向 Mac 提供 50 兆赫兹的时钟。 在 MII 模式下 不是这种情况。 RX_D3 引脚是 Mac 的输入。 在模式之间 切换时,您需要 相应地调整设计。 作为一个设置 四级自举引脚 示例,假设我们要使用 所示的示例自举表 在测试模式四下将 TI PHY 设置为 RMII 主模式。 从四级自举表中, 我们可以看到 引脚 RX_D0、RX_D1 和 RX_D2 对应于 两个位,一个 Mac 位和一个测试位。 查看 Mac 接口 选择表,可以 看到 RMII 主模式对应于 Mac 位序列 1、1、0。 现在查看 测试模式表, 可以看到测试模式四 对应于测试位序列 0、0、1。 要将 Mac 位 0 设置为 1 并将测试位 0 设置为 0,必须将引脚 RX_D0 自举为模式四。 同样,需要将 RX_D1 设置为 模式四,需要将 RX_D2 设置为模式二。 参考建议的 电阻器比率, 您将找到合适的 电阻器值, 以将每个自举 置于所需的模式。 您将发现自己具有 所示的自举配置。 同样,作为完整性 检查,您可能需要 在使器件保持 复位状态的同时 检查自举上的电压, 以确保将 PHY 设置为 正确的模式。 LED 自举还 具有一定的 灵活性,作为 两级自举提供。 因此,您只需要考虑将引脚 拉为高电平或低电平。 如果将引脚拉为低电平, 则会将自举引脚配置为 高电平有效驱动器。 当自举电压为 高电平时,LED 亮起。 相反,如果将引脚拉为 高电平,则会将自举引脚 配置为低电平有效。 另请注意,下拉 和上拉配置之间 二极管和限流 电阻器的位置 是不同的。 需要使用并联 拉取电阻器, 通过将引脚直接 连接到电源或接地 来防止产生未知的 器件状态,因为如果 没有该并联电阻器, 就很难通过二极管 连接引脚泄漏。 请回忆一下,自举 引脚具有内极。 如果该内极与并联极 具有相同的方向, 则不必要 使用并联极, 但仍建议使用。 可以将未使用的 LED 自举引脚保留为悬空状态。 假设我们使用建议的 电阻器比率将 TI PHY 设置为模式三。 您如何确定引脚 是否会保持在 模式三的阈值 电压之内? 我们可以通过 创建一个等效 电路来进行简单的分析, 同时考虑 PHY 的内极。 此时将忽略 泄漏电流、温度 和其他因素。 当 PHY 对电位 进行采样时, 自举电阻器 和内极可以 简化为分压器。 为了验证电阻器 配置是否会将 器件保持在 所需的模式, 我们需要确定 自举要进行 采样的可能最大 和最小电位值。 请记住, 电阻器的 实际电阻可能会 根据容差而波动。 在本示例中,我们 将内部下拉电阻器 称为 PD,将外部 电阻器称为 Rhi 和 Rlo。当 Rlo 和 PD 形成最高等效 电阻 REQ 正并且 Rhi 处于其最低 电阻 Rhi 负时, 自举上会产生 最大电压 Vstrap 正。 根据其容差, 可以如所示 方法计算这些值。 Rhi 负等于 5.76 乘以 0.99,结果为 5.70。 Rlo 正等于 2.49 乘以 1.01。 PD 正等于 9 乘以 1.25。 找到等效电路并 使用分压,我们 发现 Vstrap 正为 0.264 乘以 VDDIO, 这处于我们期望的 模式三范围之内。 当 Rhi 处于其 最高电阻 Rhi 正, Rlo 和 PD 形成 最低等效电阻时, 会产生最小 电压 Vstrap 负。 Rhi 正等于 1.01 乘以 5.76。 Rlo 负等于 0.99 乘以 2.49。 PD 负等于 0.75 乘以 9。 同样,找到 等效电路 并使用分压, 我们发现最小 电压 Vstrap 负 是 0.237 乘以 VDDIO, 这处于 模式三的 范围之内。 假设我们偏离 建议的电阻器值, 使用了一个 2.37k 且 容差为 1% 的下拉电阻器。 尽管该值接近 建议的 2.49k, 但在进行简单的 电路分析之后, 我们发现最小的 自举电压将使器件 处于模式二和模式 三之间的浮动状态。 同样,如果我们 使用建议的自举 电阻器值, 但其中一个 具有 5% 的容差,我们会 发现自己处于浮动模式。 温度、容差 和泄漏电流等 其他因素也 会影响自举 引脚采样的电位。 为了确保您的 自举设置为正确的 模式,您可能需要 进行更深入的分析。 请查看本演示文稿中 链接的 TI 应用手册, 以了解对四级 自举器件配置的 详细分析,从而 确保将器件设置为 正确的模式。 感谢您观看本有关 自举和 TI 以太网 PHY 的视频。 请尝试完成我们的简短 测验,以检查您对本视频 内容的理解。 有关以太网 PHY 的 更多信息,请观看 以太网系列 中的其他 高精度实验室视频。 要查找更多以太网 技术资源和搜索产品, 请访问我们的网站。
大家好,欢迎观看 TI 高精度实验室视频。 在本次课程中, 我们将专门 在以下主题中 讨论 TI 以太网 PHY 中的自举 -- 自举如何工作、 为何使用自举 来配置 PHY 以及 TI PHY 中实现的 自举类型。 有关 TI 以太网 器件如何工作的 复习内容,请观看 以太网系列中以前的 高精度实验室视频。 硬件自举是一种 通过使用硬件代替 固件或使用 硬件与固件 相结合的方法配置 集成电路的机制。 通常作为自举 提供可影响 PHY 形式或功能的 关键功能, 如 Mac 接口、自动 协商和数据速率, 该自举可 进行配置, 以防止产生未知的 设备状态或设备损坏。 在此处,您可以 看到一个示例自举 配置,用于将 TI PHY 设置为 RMII 主模式。 在整个视频中, 将更详细地 讨论不同的自举 配置和操作模式。 在 TI 以太网 PHY 中, 自举包含两级或四级。 此处显示的是一个 两级自举电路示例。 以太网 PHY 内部具有 内部上拉或下拉 电阻器和比较器。 自举引脚通常 是输出引脚。 不过,GPIO 用作加电 和复位的输入。 在此期间,内部 缓冲器的开关 断开,比较器的 开关闭合,比较器 对自举引脚上的 电位进行 采样。 该电位值确定 器件将设置为 何种模式。 一旦器件 成功加电 并设置了自举, 就会打开 比较器的 开关,关闭 缓冲器的开关, GPIO 充当输出。 在 TI 以太网 PHY 中,可以 通过寄存器写操作 来覆盖自举设置。 但在硬件复位后, PHY 将恢复为默认 自举设置。 在两级自举中,该引脚 被拉高至 VDDIO 或拉低 至接地。 两级之间的 大电位范围 可防止噪声、 电压摆幅或 其他因素导致 读取不正确的 工作模式,使您 放心 PHY 将以正确的 模式工作。 可以在器件 数据表的编程 部分中找到特定于 每个 TI PHY 的自举 电路信息。 两级自举电阻器 比率表显示了需要 针对每种工作模式 使用哪些电阻器。 可以按照 数据表的 说明来修改电阻器 Rhi 和 Rlo 的比率, 以通过更改引脚上的 电位来配置 PHY。 此处是 TI 以太网 PHY 数据表中可能显示的 一些自举表示例。 这些表显示了 将自举设置为 特定的模式会 影响哪些功能。 例如,自动负 自举表显示 RX_ER 引脚的 默认设置为 模式 0,从而启用了 自动 MDIX 功能。 要禁用自动 MDIX,需要使用 为模式一定义的 电阻器配置来 自举该引脚。 目标电压列描述了 使用 VDDIO 作为基准 将器件设置为每种 模式时自举引脚上 需要的电压电平。 VDDIO 用作 PHY 中 比较器的电源 电压。 因此,我们将目标 电压与该值进行 比较,以处理电源 电压的任何变化。 与两级自举 相反,四级自举 具有中间 电压电平。 这样可以实现 更多功能,从而 能够通过单个 引脚设置两项 功能,但需要更加 严格的组件选择。 对电阻器容差、 泄漏电流以及 其他影响组件 性能的因素的 要求更加严格。 数据表中 将提供每个 自举电平的 电压阈值, 如该示例所示。 请注意,在使用具有 引脚功能的四级自举 引脚时,必须 考虑所连接 器件的内极。 Mac 有时具有 内极,这会影响 自举电压。 需要相应地 调整外部自举 电阻器。 所有电阻器均应 使用建议的值, 容差为 1%。 请记住,在加电和复位时 对自举电压进行采样。 作为完整性检查, 您可以在保持器件的 同时测量自举 电压并复位, 以确认 PHY 会设置为 所需的工作模式。 在为不同的模式 设置自举时, 引脚的功能 可能会发生 变化,进而 需要更改 硬件设计。 请注意,MII 模式 和 RMII 主模式下 TI PHY 之间的自举配置 和功能模式有所不同。 在 RMII 主模式下, PHY 通过引脚 RX_D3 向 Mac 提供 50 兆赫兹的时钟。 在 MII 模式下 不是这种情况。 RX_D3 引脚是 Mac 的输入。 在模式之间 切换时,您需要 相应地调整设计。 作为一个设置 四级自举引脚 示例,假设我们要使用 所示的示例自举表 在测试模式四下将 TI PHY 设置为 RMII 主模式。 从四级自举表中, 我们可以看到 引脚 RX_D0、RX_D1 和 RX_D2 对应于 两个位,一个 Mac 位和一个测试位。 查看 Mac 接口 选择表,可以 看到 RMII 主模式对应于 Mac 位序列 1、1、0。 现在查看 测试模式表, 可以看到测试模式四 对应于测试位序列 0、0、1。 要将 Mac 位 0 设置为 1 并将测试位 0 设置为 0,必须将引脚 RX_D0 自举为模式四。 同样,需要将 RX_D1 设置为 模式四,需要将 RX_D2 设置为模式二。 参考建议的 电阻器比率, 您将找到合适的 电阻器值, 以将每个自举 置于所需的模式。 您将发现自己具有 所示的自举配置。 同样,作为完整性 检查,您可能需要 在使器件保持 复位状态的同时 检查自举上的电压, 以确保将 PHY 设置为 正确的模式。 LED 自举还 具有一定的 灵活性,作为 两级自举提供。 因此,您只需要考虑将引脚 拉为高电平或低电平。 如果将引脚拉为低电平, 则会将自举引脚配置为 高电平有效驱动器。 当自举电压为 高电平时,LED 亮起。 相反,如果将引脚拉为 高电平,则会将自举引脚 配置为低电平有效。 另请注意,下拉 和上拉配置之间 二极管和限流 电阻器的位置 是不同的。 需要使用并联 拉取电阻器, 通过将引脚直接 连接到电源或接地 来防止产生未知的 器件状态,因为如果 没有该并联电阻器, 就很难通过二极管 连接引脚泄漏。 请回忆一下,自举 引脚具有内极。 如果该内极与并联极 具有相同的方向, 则不必要 使用并联极, 但仍建议使用。 可以将未使用的 LED 自举引脚保留为悬空状态。 假设我们使用建议的 电阻器比率将 TI PHY 设置为模式三。 您如何确定引脚 是否会保持在 模式三的阈值 电压之内? 我们可以通过 创建一个等效 电路来进行简单的分析, 同时考虑 PHY 的内极。 此时将忽略 泄漏电流、温度 和其他因素。 当 PHY 对电位 进行采样时, 自举电阻器 和内极可以 简化为分压器。 为了验证电阻器 配置是否会将 器件保持在 所需的模式, 我们需要确定 自举要进行 采样的可能最大 和最小电位值。 请记住, 电阻器的 实际电阻可能会 根据容差而波动。 在本示例中,我们 将内部下拉电阻器 称为 PD,将外部 电阻器称为 Rhi 和 Rlo。当 Rlo 和 PD 形成最高等效 电阻 REQ 正并且 Rhi 处于其最低 电阻 Rhi 负时, 自举上会产生 最大电压 Vstrap 正。 根据其容差, 可以如所示 方法计算这些值。 Rhi 负等于 5.76 乘以 0.99,结果为 5.70。 Rlo 正等于 2.49 乘以 1.01。 PD 正等于 9 乘以 1.25。 找到等效电路并 使用分压,我们 发现 Vstrap 正为 0.264 乘以 VDDIO, 这处于我们期望的 模式三范围之内。 当 Rhi 处于其 最高电阻 Rhi 正, Rlo 和 PD 形成 最低等效电阻时, 会产生最小 电压 Vstrap 负。 Rhi 正等于 1.01 乘以 5.76。 Rlo 负等于 0.99 乘以 2.49。 PD 负等于 0.75 乘以 9。 同样,找到 等效电路 并使用分压, 我们发现最小 电压 Vstrap 负 是 0.237 乘以 VDDIO, 这处于 模式三的 范围之内。 假设我们偏离 建议的电阻器值, 使用了一个 2.37k 且 容差为 1% 的下拉电阻器。 尽管该值接近 建议的 2.49k, 但在进行简单的 电路分析之后, 我们发现最小的 自举电压将使器件 处于模式二和模式 三之间的浮动状态。 同样,如果我们 使用建议的自举 电阻器值, 但其中一个 具有 5% 的容差,我们会 发现自己处于浮动模式。 温度、容差 和泄漏电流等 其他因素也 会影响自举 引脚采样的电位。 为了确保您的 自举设置为正确的 模式,您可能需要 进行更深入的分析。 请查看本演示文稿中 链接的 TI 应用手册, 以了解对四级 自举器件配置的 详细分析,从而 确保将器件设置为 正确的模式。 感谢您观看本有关 自举和 TI 以太网 PHY 的视频。 请尝试完成我们的简短 测验,以检查您对本视频 内容的理解。 有关以太网 PHY 的 更多信息,请观看 以太网系列 中的其他 高精度实验室视频。 要查找更多以太网 技术资源和搜索产品, 请访问我们的网站。
大家好,欢迎观看 TI 高精度实验室视频。
在本次课程中, 我们将专门
在以下主题中 讨论 TI 以太网
PHY 中的自举 --
自举如何工作、 为何使用自举
来配置 PHY 以及 TI PHY 中实现的
自举类型。
有关 TI 以太网 器件如何工作的
复习内容,请观看 以太网系列中以前的
高精度实验室视频。
硬件自举是一种 通过使用硬件代替
固件或使用 硬件与固件
相结合的方法配置 集成电路的机制。
通常作为自举 提供可影响 PHY
形式或功能的 关键功能,
如 Mac 接口、自动 协商和数据速率,
该自举可 进行配置,
以防止产生未知的 设备状态或设备损坏。
在此处,您可以 看到一个示例自举
配置,用于将 TI PHY 设置为 RMII 主模式。
在整个视频中, 将更详细地
讨论不同的自举 配置和操作模式。
在 TI 以太网 PHY 中, 自举包含两级或四级。
此处显示的是一个 两级自举电路示例。
以太网 PHY 内部具有
内部上拉或下拉 电阻器和比较器。
自举引脚通常 是输出引脚。
不过,GPIO 用作加电 和复位的输入。
在此期间,内部 缓冲器的开关
断开,比较器的 开关闭合,比较器
对自举引脚上的 电位进行
采样。
该电位值确定 器件将设置为
何种模式。
一旦器件 成功加电
并设置了自举, 就会打开
比较器的 开关,关闭
缓冲器的开关, GPIO 充当输出。
在 TI 以太网 PHY 中,可以
通过寄存器写操作 来覆盖自举设置。
但在硬件复位后, PHY 将恢复为默认
自举设置。
在两级自举中,该引脚 被拉高至 VDDIO 或拉低
至接地。
两级之间的 大电位范围
可防止噪声、 电压摆幅或
其他因素导致 读取不正确的
工作模式,使您 放心 PHY 将以正确的
模式工作。
可以在器件 数据表的编程
部分中找到特定于 每个 TI PHY 的自举
电路信息。
两级自举电阻器 比率表显示了需要
针对每种工作模式 使用哪些电阻器。
可以按照 数据表的
说明来修改电阻器 Rhi 和 Rlo 的比率,
以通过更改引脚上的 电位来配置 PHY。
此处是 TI 以太网 PHY
数据表中可能显示的 一些自举表示例。
这些表显示了 将自举设置为
特定的模式会 影响哪些功能。
例如,自动负 自举表显示
RX_ER 引脚的 默认设置为
模式 0,从而启用了 自动 MDIX 功能。
要禁用自动 MDIX,需要使用
为模式一定义的 电阻器配置来
自举该引脚。
目标电压列描述了 使用 VDDIO 作为基准
将器件设置为每种 模式时自举引脚上
需要的电压电平。
VDDIO 用作 PHY 中 比较器的电源
电压。
因此,我们将目标 电压与该值进行
比较,以处理电源 电压的任何变化。
与两级自举 相反,四级自举
具有中间 电压电平。
这样可以实现 更多功能,从而
能够通过单个 引脚设置两项
功能,但需要更加 严格的组件选择。
对电阻器容差、 泄漏电流以及
其他影响组件 性能的因素的
要求更加严格。
数据表中 将提供每个
自举电平的 电压阈值,
如该示例所示。
请注意,在使用具有 引脚功能的四级自举
引脚时,必须 考虑所连接
器件的内极。
Mac 有时具有 内极,这会影响
自举电压。
需要相应地 调整外部自举
电阻器。
所有电阻器均应 使用建议的值,
容差为 1%。
请记住,在加电和复位时 对自举电压进行采样。
作为完整性检查, 您可以在保持器件的
同时测量自举 电压并复位,
以确认 PHY 会设置为 所需的工作模式。
在为不同的模式 设置自举时,
引脚的功能 可能会发生
变化,进而 需要更改
硬件设计。
请注意,MII 模式 和 RMII 主模式下
TI PHY 之间的自举配置 和功能模式有所不同。
在 RMII 主模式下, PHY 通过引脚
RX_D3 向 Mac 提供 50 兆赫兹的时钟。
在 MII 模式下 不是这种情况。
RX_D3 引脚是 Mac 的输入。
在模式之间 切换时,您需要
相应地调整设计。
作为一个设置 四级自举引脚
示例,假设我们要使用 所示的示例自举表
在测试模式四下将 TI PHY 设置为 RMII 主模式。
从四级自举表中, 我们可以看到
引脚 RX_D0、RX_D1 和 RX_D2 对应于
两个位,一个 Mac 位和一个测试位。
查看 Mac 接口 选择表,可以
看到 RMII 主模式对应于 Mac 位序列 1、1、0。
现在查看 测试模式表,
可以看到测试模式四 对应于测试位序列 0、0、1。
要将 Mac 位 0 设置为 1 并将测试位 0
设置为 0,必须将引脚 RX_D0 自举为模式四。
同样,需要将 RX_D1 设置为
模式四,需要将 RX_D2 设置为模式二。
参考建议的 电阻器比率,
您将找到合适的 电阻器值,
以将每个自举 置于所需的模式。
您将发现自己具有 所示的自举配置。
同样,作为完整性 检查,您可能需要
在使器件保持 复位状态的同时
检查自举上的电压, 以确保将 PHY 设置为
正确的模式。
LED 自举还 具有一定的
灵活性,作为 两级自举提供。
因此,您只需要考虑将引脚 拉为高电平或低电平。
如果将引脚拉为低电平, 则会将自举引脚配置为
高电平有效驱动器。
当自举电压为 高电平时,LED 亮起。
相反,如果将引脚拉为 高电平,则会将自举引脚
配置为低电平有效。
另请注意,下拉 和上拉配置之间
二极管和限流 电阻器的位置
是不同的。
需要使用并联 拉取电阻器,
通过将引脚直接 连接到电源或接地
来防止产生未知的 器件状态,因为如果
没有该并联电阻器, 就很难通过二极管
连接引脚泄漏。
请回忆一下,自举 引脚具有内极。
如果该内极与并联极 具有相同的方向,
则不必要 使用并联极,
但仍建议使用。
可以将未使用的 LED 自举引脚保留为悬空状态。
假设我们使用建议的 电阻器比率将 TI PHY
设置为模式三。
您如何确定引脚 是否会保持在
模式三的阈值 电压之内?
我们可以通过 创建一个等效
电路来进行简单的分析, 同时考虑 PHY 的内极。
此时将忽略 泄漏电流、温度
和其他因素。
当 PHY 对电位 进行采样时,
自举电阻器 和内极可以
简化为分压器。
为了验证电阻器 配置是否会将
器件保持在 所需的模式,
我们需要确定 自举要进行
采样的可能最大 和最小电位值。
请记住, 电阻器的
实际电阻可能会 根据容差而波动。
在本示例中,我们 将内部下拉电阻器
称为 PD,将外部 电阻器称为 Rhi
和 Rlo。当 Rlo 和 PD 形成最高等效
电阻 REQ 正并且 Rhi 处于其最低
电阻 Rhi 负时, 自举上会产生
最大电压 Vstrap 正。
根据其容差, 可以如所示
方法计算这些值。
Rhi 负等于 5.76 乘以 0.99,结果为 5.70。
Rlo 正等于 2.49 乘以 1.01。
PD 正等于 9 乘以 1.25。
找到等效电路并 使用分压,我们
发现 Vstrap 正为 0.264 乘以 VDDIO,
这处于我们期望的 模式三范围之内。
当 Rhi 处于其 最高电阻 Rhi 正,
Rlo 和 PD 形成 最低等效电阻时,
会产生最小 电压 Vstrap 负。
Rhi 正等于 1.01 乘以 5.76。
Rlo 负等于 0.99 乘以 2.49。
PD 负等于 0.75 乘以 9。
同样,找到 等效电路
并使用分压, 我们发现最小
电压 Vstrap 负 是 0.237 乘以 VDDIO,
这处于 模式三的
范围之内。
假设我们偏离 建议的电阻器值,
使用了一个 2.37k 且 容差为 1% 的下拉电阻器。
尽管该值接近 建议的 2.49k,
但在进行简单的 电路分析之后,
我们发现最小的 自举电压将使器件
处于模式二和模式 三之间的浮动状态。
同样,如果我们 使用建议的自举
电阻器值, 但其中一个
具有 5% 的容差,我们会 发现自己处于浮动模式。
温度、容差 和泄漏电流等
其他因素也 会影响自举
引脚采样的电位。
为了确保您的 自举设置为正确的
模式,您可能需要 进行更深入的分析。
请查看本演示文稿中 链接的 TI 应用手册,
以了解对四级 自举器件配置的
详细分析,从而 确保将器件设置为
正确的模式。
感谢您观看本有关 自举和 TI 以太网
PHY 的视频。
请尝试完成我们的简短 测验,以检查您对本视频
内容的理解。
有关以太网 PHY 的 更多信息,请观看
以太网系列 中的其他
高精度实验室视频。
要查找更多以太网 技术资源和搜索产品,
请访问我们的网站。
大家好,欢迎观看 TI 高精度实验室视频。 在本次课程中, 我们将专门 在以下主题中 讨论 TI 以太网 PHY 中的自举 -- 自举如何工作、 为何使用自举 来配置 PHY 以及 TI PHY 中实现的 自举类型。 有关 TI 以太网 器件如何工作的 复习内容,请观看 以太网系列中以前的 高精度实验室视频。 硬件自举是一种 通过使用硬件代替 固件或使用 硬件与固件 相结合的方法配置 集成电路的机制。 通常作为自举 提供可影响 PHY 形式或功能的 关键功能, 如 Mac 接口、自动 协商和数据速率, 该自举可 进行配置, 以防止产生未知的 设备状态或设备损坏。 在此处,您可以 看到一个示例自举 配置,用于将 TI PHY 设置为 RMII 主模式。 在整个视频中, 将更详细地 讨论不同的自举 配置和操作模式。 在 TI 以太网 PHY 中, 自举包含两级或四级。 此处显示的是一个 两级自举电路示例。 以太网 PHY 内部具有 内部上拉或下拉 电阻器和比较器。 自举引脚通常 是输出引脚。 不过,GPIO 用作加电 和复位的输入。 在此期间,内部 缓冲器的开关 断开,比较器的 开关闭合,比较器 对自举引脚上的 电位进行 采样。 该电位值确定 器件将设置为 何种模式。 一旦器件 成功加电 并设置了自举, 就会打开 比较器的 开关,关闭 缓冲器的开关, GPIO 充当输出。 在 TI 以太网 PHY 中,可以 通过寄存器写操作 来覆盖自举设置。 但在硬件复位后, PHY 将恢复为默认 自举设置。 在两级自举中,该引脚 被拉高至 VDDIO 或拉低 至接地。 两级之间的 大电位范围 可防止噪声、 电压摆幅或 其他因素导致 读取不正确的 工作模式,使您 放心 PHY 将以正确的 模式工作。 可以在器件 数据表的编程 部分中找到特定于 每个 TI PHY 的自举 电路信息。 两级自举电阻器 比率表显示了需要 针对每种工作模式 使用哪些电阻器。 可以按照 数据表的 说明来修改电阻器 Rhi 和 Rlo 的比率, 以通过更改引脚上的 电位来配置 PHY。 此处是 TI 以太网 PHY 数据表中可能显示的 一些自举表示例。 这些表显示了 将自举设置为 特定的模式会 影响哪些功能。 例如,自动负 自举表显示 RX_ER 引脚的 默认设置为 模式 0,从而启用了 自动 MDIX 功能。 要禁用自动 MDIX,需要使用 为模式一定义的 电阻器配置来 自举该引脚。 目标电压列描述了 使用 VDDIO 作为基准 将器件设置为每种 模式时自举引脚上 需要的电压电平。 VDDIO 用作 PHY 中 比较器的电源 电压。 因此,我们将目标 电压与该值进行 比较,以处理电源 电压的任何变化。 与两级自举 相反,四级自举 具有中间 电压电平。 这样可以实现 更多功能,从而 能够通过单个 引脚设置两项 功能,但需要更加 严格的组件选择。 对电阻器容差、 泄漏电流以及 其他影响组件 性能的因素的 要求更加严格。 数据表中 将提供每个 自举电平的 电压阈值, 如该示例所示。 请注意,在使用具有 引脚功能的四级自举 引脚时,必须 考虑所连接 器件的内极。 Mac 有时具有 内极,这会影响 自举电压。 需要相应地 调整外部自举 电阻器。 所有电阻器均应 使用建议的值, 容差为 1%。 请记住,在加电和复位时 对自举电压进行采样。 作为完整性检查, 您可以在保持器件的 同时测量自举 电压并复位, 以确认 PHY 会设置为 所需的工作模式。 在为不同的模式 设置自举时, 引脚的功能 可能会发生 变化,进而 需要更改 硬件设计。 请注意,MII 模式 和 RMII 主模式下 TI PHY 之间的自举配置 和功能模式有所不同。 在 RMII 主模式下, PHY 通过引脚 RX_D3 向 Mac 提供 50 兆赫兹的时钟。 在 MII 模式下 不是这种情况。 RX_D3 引脚是 Mac 的输入。 在模式之间 切换时,您需要 相应地调整设计。 作为一个设置 四级自举引脚 示例,假设我们要使用 所示的示例自举表 在测试模式四下将 TI PHY 设置为 RMII 主模式。 从四级自举表中, 我们可以看到 引脚 RX_D0、RX_D1 和 RX_D2 对应于 两个位,一个 Mac 位和一个测试位。 查看 Mac 接口 选择表,可以 看到 RMII 主模式对应于 Mac 位序列 1、1、0。 现在查看 测试模式表, 可以看到测试模式四 对应于测试位序列 0、0、1。 要将 Mac 位 0 设置为 1 并将测试位 0 设置为 0,必须将引脚 RX_D0 自举为模式四。 同样,需要将 RX_D1 设置为 模式四,需要将 RX_D2 设置为模式二。 参考建议的 电阻器比率, 您将找到合适的 电阻器值, 以将每个自举 置于所需的模式。 您将发现自己具有 所示的自举配置。 同样,作为完整性 检查,您可能需要 在使器件保持 复位状态的同时 检查自举上的电压, 以确保将 PHY 设置为 正确的模式。 LED 自举还 具有一定的 灵活性,作为 两级自举提供。 因此,您只需要考虑将引脚 拉为高电平或低电平。 如果将引脚拉为低电平, 则会将自举引脚配置为 高电平有效驱动器。 当自举电压为 高电平时,LED 亮起。 相反,如果将引脚拉为 高电平,则会将自举引脚 配置为低电平有效。 另请注意,下拉 和上拉配置之间 二极管和限流 电阻器的位置 是不同的。 需要使用并联 拉取电阻器, 通过将引脚直接 连接到电源或接地 来防止产生未知的 器件状态,因为如果 没有该并联电阻器, 就很难通过二极管 连接引脚泄漏。 请回忆一下,自举 引脚具有内极。 如果该内极与并联极 具有相同的方向, 则不必要 使用并联极, 但仍建议使用。 可以将未使用的 LED 自举引脚保留为悬空状态。 假设我们使用建议的 电阻器比率将 TI PHY 设置为模式三。 您如何确定引脚 是否会保持在 模式三的阈值 电压之内? 我们可以通过 创建一个等效 电路来进行简单的分析, 同时考虑 PHY 的内极。 此时将忽略 泄漏电流、温度 和其他因素。 当 PHY 对电位 进行采样时, 自举电阻器 和内极可以 简化为分压器。 为了验证电阻器 配置是否会将 器件保持在 所需的模式, 我们需要确定 自举要进行 采样的可能最大 和最小电位值。 请记住, 电阻器的 实际电阻可能会 根据容差而波动。 在本示例中,我们 将内部下拉电阻器 称为 PD,将外部 电阻器称为 Rhi 和 Rlo。当 Rlo 和 PD 形成最高等效 电阻 REQ 正并且 Rhi 处于其最低 电阻 Rhi 负时, 自举上会产生 最大电压 Vstrap 正。 根据其容差, 可以如所示 方法计算这些值。 Rhi 负等于 5.76 乘以 0.99,结果为 5.70。 Rlo 正等于 2.49 乘以 1.01。 PD 正等于 9 乘以 1.25。 找到等效电路并 使用分压,我们 发现 Vstrap 正为 0.264 乘以 VDDIO, 这处于我们期望的 模式三范围之内。 当 Rhi 处于其 最高电阻 Rhi 正, Rlo 和 PD 形成 最低等效电阻时, 会产生最小 电压 Vstrap 负。 Rhi 正等于 1.01 乘以 5.76。 Rlo 负等于 0.99 乘以 2.49。 PD 负等于 0.75 乘以 9。 同样,找到 等效电路 并使用分压, 我们发现最小 电压 Vstrap 负 是 0.237 乘以 VDDIO, 这处于 模式三的 范围之内。 假设我们偏离 建议的电阻器值, 使用了一个 2.37k 且 容差为 1% 的下拉电阻器。 尽管该值接近 建议的 2.49k, 但在进行简单的 电路分析之后, 我们发现最小的 自举电压将使器件 处于模式二和模式 三之间的浮动状态。 同样,如果我们 使用建议的自举 电阻器值, 但其中一个 具有 5% 的容差,我们会 发现自己处于浮动模式。 温度、容差 和泄漏电流等 其他因素也 会影响自举 引脚采样的电位。 为了确保您的 自举设置为正确的 模式,您可能需要 进行更深入的分析。 请查看本演示文稿中 链接的 TI 应用手册, 以了解对四级 自举器件配置的 详细分析,从而 确保将器件设置为 正确的模式。 感谢您观看本有关 自举和 TI 以太网 PHY 的视频。 请尝试完成我们的简短 测验,以检查您对本视频 内容的理解。 有关以太网 PHY 的 更多信息,请观看 以太网系列 中的其他 高精度实验室视频。 要查找更多以太网 技术资源和搜索产品, 请访问我们的网站。
大家好,欢迎观看 TI 高精度实验室视频。
在本次课程中, 我们将专门
在以下主题中 讨论 TI 以太网
PHY 中的自举 --
自举如何工作、 为何使用自举
来配置 PHY 以及 TI PHY 中实现的
自举类型。
有关 TI 以太网 器件如何工作的
复习内容,请观看 以太网系列中以前的
高精度实验室视频。
硬件自举是一种 通过使用硬件代替
固件或使用 硬件与固件
相结合的方法配置 集成电路的机制。
通常作为自举 提供可影响 PHY
形式或功能的 关键功能,
如 Mac 接口、自动 协商和数据速率,
该自举可 进行配置,
以防止产生未知的 设备状态或设备损坏。
在此处,您可以 看到一个示例自举
配置,用于将 TI PHY 设置为 RMII 主模式。
在整个视频中, 将更详细地
讨论不同的自举 配置和操作模式。
在 TI 以太网 PHY 中, 自举包含两级或四级。
此处显示的是一个 两级自举电路示例。
以太网 PHY 内部具有
内部上拉或下拉 电阻器和比较器。
自举引脚通常 是输出引脚。
不过,GPIO 用作加电 和复位的输入。
在此期间,内部 缓冲器的开关
断开,比较器的 开关闭合,比较器
对自举引脚上的 电位进行
采样。
该电位值确定 器件将设置为
何种模式。
一旦器件 成功加电
并设置了自举, 就会打开
比较器的 开关,关闭
缓冲器的开关, GPIO 充当输出。
在 TI 以太网 PHY 中,可以
通过寄存器写操作 来覆盖自举设置。
但在硬件复位后, PHY 将恢复为默认
自举设置。
在两级自举中,该引脚 被拉高至 VDDIO 或拉低
至接地。
两级之间的 大电位范围
可防止噪声、 电压摆幅或
其他因素导致 读取不正确的
工作模式,使您 放心 PHY 将以正确的
模式工作。
可以在器件 数据表的编程
部分中找到特定于 每个 TI PHY 的自举
电路信息。
两级自举电阻器 比率表显示了需要
针对每种工作模式 使用哪些电阻器。
可以按照 数据表的
说明来修改电阻器 Rhi 和 Rlo 的比率,
以通过更改引脚上的 电位来配置 PHY。
此处是 TI 以太网 PHY
数据表中可能显示的 一些自举表示例。
这些表显示了 将自举设置为
特定的模式会 影响哪些功能。
例如,自动负 自举表显示
RX_ER 引脚的 默认设置为
模式 0,从而启用了 自动 MDIX 功能。
要禁用自动 MDIX,需要使用
为模式一定义的 电阻器配置来
自举该引脚。
目标电压列描述了 使用 VDDIO 作为基准
将器件设置为每种 模式时自举引脚上
需要的电压电平。
VDDIO 用作 PHY 中 比较器的电源
电压。
因此,我们将目标 电压与该值进行
比较,以处理电源 电压的任何变化。
与两级自举 相反,四级自举
具有中间 电压电平。
这样可以实现 更多功能,从而
能够通过单个 引脚设置两项
功能,但需要更加 严格的组件选择。
对电阻器容差、 泄漏电流以及
其他影响组件 性能的因素的
要求更加严格。
数据表中 将提供每个
自举电平的 电压阈值,
如该示例所示。
请注意,在使用具有 引脚功能的四级自举
引脚时,必须 考虑所连接
器件的内极。
Mac 有时具有 内极,这会影响
自举电压。
需要相应地 调整外部自举
电阻器。
所有电阻器均应 使用建议的值,
容差为 1%。
请记住,在加电和复位时 对自举电压进行采样。
作为完整性检查, 您可以在保持器件的
同时测量自举 电压并复位,
以确认 PHY 会设置为 所需的工作模式。
在为不同的模式 设置自举时,
引脚的功能 可能会发生
变化,进而 需要更改
硬件设计。
请注意,MII 模式 和 RMII 主模式下
TI PHY 之间的自举配置 和功能模式有所不同。
在 RMII 主模式下, PHY 通过引脚
RX_D3 向 Mac 提供 50 兆赫兹的时钟。
在 MII 模式下 不是这种情况。
RX_D3 引脚是 Mac 的输入。
在模式之间 切换时,您需要
相应地调整设计。
作为一个设置 四级自举引脚
示例,假设我们要使用 所示的示例自举表
在测试模式四下将 TI PHY 设置为 RMII 主模式。
从四级自举表中, 我们可以看到
引脚 RX_D0、RX_D1 和 RX_D2 对应于
两个位,一个 Mac 位和一个测试位。
查看 Mac 接口 选择表,可以
看到 RMII 主模式对应于 Mac 位序列 1、1、0。
现在查看 测试模式表,
可以看到测试模式四 对应于测试位序列 0、0、1。
要将 Mac 位 0 设置为 1 并将测试位 0
设置为 0,必须将引脚 RX_D0 自举为模式四。
同样,需要将 RX_D1 设置为
模式四,需要将 RX_D2 设置为模式二。
参考建议的 电阻器比率,
您将找到合适的 电阻器值,
以将每个自举 置于所需的模式。
您将发现自己具有 所示的自举配置。
同样,作为完整性 检查,您可能需要
在使器件保持 复位状态的同时
检查自举上的电压, 以确保将 PHY 设置为
正确的模式。
LED 自举还 具有一定的
灵活性,作为 两级自举提供。
因此,您只需要考虑将引脚 拉为高电平或低电平。
如果将引脚拉为低电平, 则会将自举引脚配置为
高电平有效驱动器。
当自举电压为 高电平时,LED 亮起。
相反,如果将引脚拉为 高电平,则会将自举引脚
配置为低电平有效。
另请注意,下拉 和上拉配置之间
二极管和限流 电阻器的位置
是不同的。
需要使用并联 拉取电阻器,
通过将引脚直接 连接到电源或接地
来防止产生未知的 器件状态,因为如果
没有该并联电阻器, 就很难通过二极管
连接引脚泄漏。
请回忆一下,自举 引脚具有内极。
如果该内极与并联极 具有相同的方向,
则不必要 使用并联极,
但仍建议使用。
可以将未使用的 LED 自举引脚保留为悬空状态。
假设我们使用建议的 电阻器比率将 TI PHY
设置为模式三。
您如何确定引脚 是否会保持在
模式三的阈值 电压之内?
我们可以通过 创建一个等效
电路来进行简单的分析, 同时考虑 PHY 的内极。
此时将忽略 泄漏电流、温度
和其他因素。
当 PHY 对电位 进行采样时,
自举电阻器 和内极可以
简化为分压器。
为了验证电阻器 配置是否会将
器件保持在 所需的模式,
我们需要确定 自举要进行
采样的可能最大 和最小电位值。
请记住, 电阻器的
实际电阻可能会 根据容差而波动。
在本示例中,我们 将内部下拉电阻器
称为 PD,将外部 电阻器称为 Rhi
和 Rlo。当 Rlo 和 PD 形成最高等效
电阻 REQ 正并且 Rhi 处于其最低
电阻 Rhi 负时, 自举上会产生
最大电压 Vstrap 正。
根据其容差, 可以如所示
方法计算这些值。
Rhi 负等于 5.76 乘以 0.99,结果为 5.70。
Rlo 正等于 2.49 乘以 1.01。
PD 正等于 9 乘以 1.25。
找到等效电路并 使用分压,我们
发现 Vstrap 正为 0.264 乘以 VDDIO,
这处于我们期望的 模式三范围之内。
当 Rhi 处于其 最高电阻 Rhi 正,
Rlo 和 PD 形成 最低等效电阻时,
会产生最小 电压 Vstrap 负。
Rhi 正等于 1.01 乘以 5.76。
Rlo 负等于 0.99 乘以 2.49。
PD 负等于 0.75 乘以 9。
同样,找到 等效电路
并使用分压, 我们发现最小
电压 Vstrap 负 是 0.237 乘以 VDDIO,
这处于 模式三的
范围之内。
假设我们偏离 建议的电阻器值,
使用了一个 2.37k 且 容差为 1% 的下拉电阻器。
尽管该值接近 建议的 2.49k,
但在进行简单的 电路分析之后,
我们发现最小的 自举电压将使器件
处于模式二和模式 三之间的浮动状态。
同样,如果我们 使用建议的自举
电阻器值, 但其中一个
具有 5% 的容差,我们会 发现自己处于浮动模式。
温度、容差 和泄漏电流等
其他因素也 会影响自举
引脚采样的电位。
为了确保您的 自举设置为正确的
模式,您可能需要 进行更深入的分析。
请查看本演示文稿中 链接的 TI 应用手册,
以了解对四级 自举器件配置的
详细分析,从而 确保将器件设置为
正确的模式。
感谢您观看本有关 自举和 TI 以太网
PHY 的视频。
请尝试完成我们的简短 测验,以检查您对本视频
内容的理解。
有关以太网 PHY 的 更多信息,请观看
以太网系列 中的其他
高精度实验室视频。
要查找更多以太网 技术资源和搜索产品,
请访问我们的网站。
手机看
扫码用手机观看
 视频简介
视频简介
3.2 TI 高精度实验室-以太网:以太网 PHY 中的自举如何工作
所属课程:TI 高精度实验室-以太网
发布时间:2020.05.19
视频集数:5
本节视频时长:00:10:19
了解如何使用以太网PHY,重定时器和重驱动器进行设计。 TI Precision Labs(TIPL)是模拟信号链设计人员最全面的在线教室。该 接口系列 提供了通过工业,汽车和多种应用领域常用协议的技术培训。 从开始以太网系列开始,可以全面了解以太网PHY收发器,重定时器和重驱动器,并学习如何优化信号完整性和网络范围。



 未学习 3.1 TI 高精度实验室-以太网:什么是以太网PHY?
未学习 3.1 TI 高精度实验室-以太网:什么是以太网PHY?
 未学习 3.2 TI 高精度实验室-以太网:以太网 PHY 中的自举如何工作
未学习 3.2 TI 高精度实验室-以太网:以太网 PHY 中的自举如何工作
 未学习 3.3 TI 高精度实验室-以太网:如何配置以太网参考时钟
未学习 3.3 TI 高精度实验室-以太网:如何配置以太网参考时钟
 未学习 3.4 TI 高精度实验室-以太网:25-Gbps以太网数据传输的发射电路优化
未学习 3.4 TI 高精度实验室-以太网:25-Gbps以太网数据传输的发射电路优化
 未学习 如何设计 100BASE-TX 以太网原理图
未学习 如何设计 100BASE-TX 以太网原理图





