
电池管理IC
最新课程
- 利用EIS技术重新定义BMS的可能性
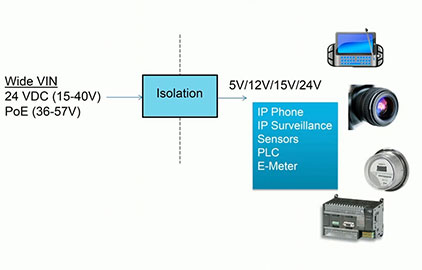
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
4.3 如何为真空机器人选择合适的充电管理器



真空机器人是本视频中第三个
也是最后一个详细介绍的 智能家居设备。
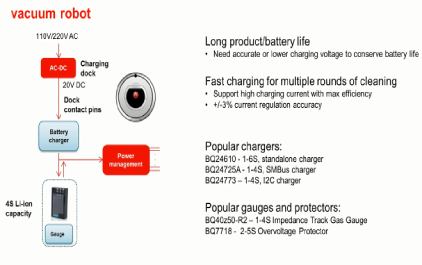
该系统通常由充电台
和机器人本身组成。
基座连接到交流电源,
并将其转换成 20伏特左右的直流电压。
机器人内部的充电器IC 连接到直流电源,
并为一个4S锂离子电池充电。
电池组内部的一个量规
可以帮助设备确定
何时返回充电。
真空机器人的设计
考虑到电池寿命长度。
你想让你的真空机器人 良好运行好几年。
所以你不想过度给电池充电。
然而,如果你把它 充到一个更低的电压,
你就不能充分利用电池的容量。
容量对充电电压非常敏感。
我将在后面的幻灯片中讨论它。
一个很好的方法,以确保你 既不过度充电
也不会充电不足, 则是使用一个
具有良好的 Vbatt调节精度的充电器。
第二个设计考虑是快速充电。
如今的真空机器人 可以自动回到充电座,
充好电,然后再出去吸尘。
更快的充电速度将帮助他们 完成更多的清洁循环,
并在白天人们外出时
清洁更多的区域。
我们已经看到配有更大 电池组的真空机器人,
充电电流可达3安培。
在这样的电流水平下,
效率对于最小化散热 变得很重要。
电流调节精度
也变得更加重要,因为你不想
设计充电电流。
但实际上,它的充电速度更高,
会损坏你的电池, 或者充电时间更长,
但充电速度更低。
右下角有一些 常用的充电器、量规
和保护器
供您参考。
利用MCU控制调节 [? FATs. ?],
实现了部分真空机器人 充电器的离散化。
该方案成本低,但Vbatt
调节精度较差。
这就是为什么TI集成充电器
是一个更好的解决方案。
Vbatt的微小变化
会导致电池容量的巨大差异。
首先,过度充电 会降低电池的寿命,
甚至会带来安全风险。
如果您希望Vbatt调节电压更低,
为了确保调节上限不超过
包装制造商的指南,
电池容量的最坏情况
发生在Vbatt调节电压
位于最低端的时候。
因此,选择一个
具有严格的Vbatt精度的充电器,
既可以确保你不会充电过量,
也可以确保你不会充电不足。
在左边的图中有几个关于DOD
不同Vbatt精度的点。
准确性可以转化为放电的深度
或电池的利用率。
在理想的Vbatt精度下, 变化量为0。
您可以利用100%的容量。
一个增/减0.5%充电器 在最坏的情况下
使用98%的容量。
在离散解的情况下,
2%的正确率是很好的。
但在更糟糕的情况下, 你只使用了84%的电池。
有了更高的精度,你实际上 可以节省整体成本,
通过选择更小的电池组,
而不是使用一个更大的 带有一些未开发的容量。
你想设计一个 电池寿命长的
真空机器人。
秘诀就是稍微少充一点电。
图中x轴为充电周期数,
y轴为电池容量,
曲线族表示
不同的Vbatt调节点。
你可以看到,随着时间的推移,
充电电压越低,电池的容量 保持得越好。
在高电压下充电
一开始会给你更大的容量,
但是电池很快就会 在充电周期中退化。
这里还有两个重要的设计考虑。
首先,终止当前。
看绿色的曲线, 左边是充电电流。
充电电流在恒压阶段 逐渐减小。
如果它有一个 高终止电流截止点,
你可以过早终止,留下一部分
电池未使用。
如果没有终止阈值,
即使用安全计时器终止, 则可能
充电过多而损坏电池。
预充电阶段是电池
在低电压下深度放电的阶段。
首先要以较低的速率充电
以确保它是一个好电池。
这被称为预充电阶段。
如果你绕过这一步, 用快速充电电流
给一个极度耗竭的电池充电, 这可能是不安全的。
开关频率-- 频率越高,
可以使用的 [?无源器件?]越小。
以两个TI充电器为例,
分别在750kHz和600kHz处的 BQ24725A和BQ24610开关,
与离散解的非常低的
50kHz相比。
TI充电器、电感器的尺寸 和价格
都要低得多。
独立充电器和主机控制充电器--
独立充电器的设计很简单,因
为充电参数
是由外部电阻和电容设置的。
主机控制的充电器 允许更灵活的充电,
因为主机可以用软件控制充电。
当你设计一个电池充电器时,
安全是另一个 需要考虑的重要问题。
TI充电器提供了 一套完整的安全功能。
如果你看一下BQ24725A, 例如,在输入端,
我们有过电流保护,过压保护,
和短路保护,
还有集成电路热保护。
电感器和场效应管短路保护 也包括在内。
在电池组一侧, 包括电池过电压、短路
和反向保护。
与充电器集成电路
提供的完整保护方案相比, 离散解决方案通常
提供较少保护或没有保护。
离散保护必须由
MCU实现,控制额外的离散元件。
这将增加软件和硬件设计的复杂性。
响应时间对于保护也是至关重要的。
一个离散的解决方案 通常比充电器IC
需要更长的时间 来采取保护措施。
总而言之,这里有几个TI充电器
相对于离散型机器人的优点。
首先,您可以节省成本,
在电池组使用 高电压精度充电器IC上。
您也可以使用一个更小, 成本更低的
电感与充电器IC更高的 开关频率。
您还可以实现良好的 电池运行时间和寿命
与良好的Vbatt精度。
然后主机控制和独立充电器
为您提供两种风格的设计。
最后但同样重要的是--
安全。
TI充电器提供全套的安全功能,
帮助您设计一个无忧的充电系统。
-
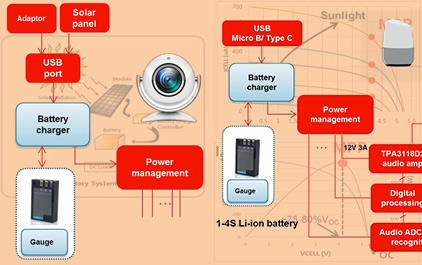
 未学习 4.1 如何为IP摄像机选择合适的充电管理器
未学习 4.1 如何为IP摄像机选择合适的充电管理器
-
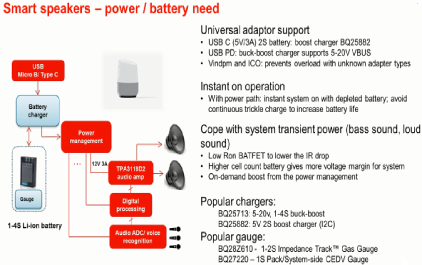 未学习 4.2 如何为智能扬声器选择合适的充电管理器
未学习 4.2 如何为智能扬声器选择合适的充电管理器
-
 未学习 4.3 如何为真空机器人选择合适的充电管理器
未学习 4.3 如何为真空机器人选择合适的充电管理器


 视频简介
视频简介
4.3 如何为真空机器人选择合适的充电管理器
这种按需培训提供了如何增加电池运行时间和电池寿命的实用建议,以及如何在真空机器人设计中节省电池组和无源元件的费用。

