1.2 采用DS90UB960解串器集线器和TDA SoC的多摄像头系统:演示
Loading the player...
将在30s后自动为您播放下一课程
大家好,欢迎收看UB960解串器集线器 系统级用例培训系列的第2模块。 在模块1中,我们介绍了UB960提供的 一些可能性,包括聚合和复制。 现在让我们看看我们如何创建一个演示系统 来展示其中的一些功能。 让我们快速回顾一下其中一个复制用例。 在该系统中,相同的多信道视频 在两个不同的视频处理器上 根据两种不同的目的,以两种不同的方式被处理。 例如,我着眼于2号 其可能是TDA2P或TDA3设备,可能正在使用 传统的[听不清]功能, 用聚合的4信道视频,通过复制模式传播到 CSI的端口1。 在此应用中,非常重要的是 最终输出对于人类观察者来说的形态, 并且这个最终输出确实有被发送到显示器。 因此,该级的图像质量和无缝性 是应用的焦点。 同时,处理4信道视频的 另一个目的 可以是检测场景中的对象, 这可能是自动停车应用中的情况。 该处理过程使用聚合4信道视频传播到CSI端口0, 在SoC编号1上执行。 该视频处理与传统环绕视图 非常不同, 并且对象检测通常涉及 机器学习或甚至深度学习。 适合于人工智能的图像 可以被预处理的方式与要吸引人类用户 并可能不会被发送到显示器的图像 非常不同。 在TI,我们已经组建了一个演示系统 来测试复制模式。 演示系统包括三个TI EVM、四个摄像头 模块、四个HDMI监视器和两个定制MIPI电缆。 让我们从解串器集线器EVM开始, 可以使用UB960或UB964 EVM,具体取决于 摄像机分辨率。 在图中,我们有UB960 EVM, 并且正在CSI-0和CSI-1端口上 使用顶部MIPI连接器。 该EVM还具有用于CSI端口0的底侧MIPI连接器, 因此它可以直接与TDA2 EVM或TDA3 EVM配对。 但这需要硬件修改,因此对于此演示, 我们没有采用该选项。 如果您在相机上使用的串行器不是953, 则EVM可能需要的另一个修改 是POC过滤网络。 UB960连接到两个TDA3 EVM。 我们有一个MIPI… 60针MIPI连接器和Symtec的定制电缆。 电缆是从Symtec在线订购的, 此处给出的链接指向一个文档, 其中列出了各种电缆选项和随附的 部件号。 对于这个演示,我们可能 不幸地选择了终端边缘电缆端。 并且插座边缘也是可用的, 这将允许电缆被平放 而不是像图中那样朝上放着。 EVM本身可以是TDA2P或TDA3。 它们都具有用于CSI和I2C信号的 相同MIPI连接器。 在这里,我们展示了TDA3 EVM。 我们将把它们称为主要和次要EVM,具体取决于 它们连接到的UB960上的是哪些I2C信号。 TDA3是一种低成本SoC选项,适用于2D环绕视图 或基本分析。 如果需要3D环绕视图或更高级的分析, TDA2P EVM将更合适。 最后,这里的相机模块是MARS模块, 可以从[听不清]中进行订购。 它们由130万像素的AR0143传感器 和一个913串行器组成,它们一共有四个。 Division SDK软件包中提供了 对这些相机的开箱即用支持。 用于此演示的版本是3.06, 因为其对各种多信道用例提供了良好的开箱即用 支持。 让我们仔细看看处理器如何…在我们的例子中 是两个TDA3… 其如何与UB960以及 作为共享资源的摄像机进行交互。 两个SoC都可以访问UB960寄存器以及I2C总线。 MIPI连接器不仅承载CSI数据, 还承载两个I2C,时钟和数据。 UB960总共有四个I2C引脚 可用于主时钟和辅助时钟 和数据总线。 这些I2C具有相同的地址,并且都可以访问 反向信道。 唯一的不对称功能是无法通过 辅助总线访问数字复位寄存器。 然而,通过BCC 0、1、2或3个MAP位字段 可以一次向一个I2C总线授予反向信道访问权。 默认为主I2C总线。 如果在系统级别,我们希望两个SoC 都与传感器通信,则需要 实现某种信号交换协议。 至少,信号交换是必要的,以确保 如果一个SoC打开两个CSI发送端口, 另一个SoC CSI接收器会被充电并初始化。 否则,将不会发生发送器和接收器CSI之间的 信号交换。 此演示的目标是使复制模式 在Vision SDK软件的最小变化下工作, 该软件具有对传统环绕视图用例的TDA3、 UB960和MARS摄像机的开箱即用支持。 我们决定在两个处理器上运行 两个不同的图像以将变化最小化, 并且,源代码仅在两个地方进行了修改。 辅助EVM软件被修改为 实际上不与传感器通信。 它仍然可以与960通信 并启动其自己的CSI接收器, 但不使用反向信道, 因此,BCC 0、1、2、3 MAP字段未被更改。 因此,辅助EVM在没有视频的情况下 启动其用例,并且视频仅在 主EVM准备好系统后才会显示。 主要EVM正在执行实际的UB960 初始化,包括启动传感器、 接收端口、CSI端口以及启用复制模式。 现在让我们实际来看看这个设置。 我这里打开了两个[听不清]控制台来观看Vision SDK 固件映像,并输入命令。 与此同时,我们将关注连接到 两个TDA3端口的两个HDMI监视器。 大型监视器连接到主EVM, 较小的监视器连接到辅助EVM, 它们将分别运行4信道 和单信道用例。 首先,我们将启动并启动辅助EV。 那么这是主要的Vision SDK菜单,首先要做的是 选择合适的捕获源。 因此,我将使用S进行系统设置, 2进行捕获设置,然后使用C进行MARS摄像。 接下来,我们选择用例, 因此我们将为ISS用例选择5, 为单信道ISS用例选择1。 现在,我们在HDMI监视器上 看到图形叠加层,并且由于辅助EVM没有 直接与摄像机对话,因此在主要EVM启动 并初始化解串器和传感器之前, 视频捕获将无法使用。 所以现在,我们将启动主要EVM, 并采用与以前类似的程序。 这是Vision SDK的主要菜单。 首先,我们选择捕获源… S用于系统设置,2用于捕获设置, C用于MARS摄像机。 现在,我们来选择用例… 为ISS用例选择5,然后再选择5 以用于Surround View Calibration, 这是我们将用于 此演示的4信道用例。 所以现在,主EVM正在与960 以及传感器交谈,而现在, 它已经打开了复制模式。 因此,视频显示在辅助EVM上, 同时,主要EVM正在初始化… 完成其自己的用例的初始化, 并且很快就会完成。 有了。 现在,我们通过CSI端口0在主EVM上 运行4信道用例,通过CSI端口1 在辅助EVM上运行单信道用例。 所有这些都由UB960的复制模式功能达成的。
大家好,欢迎收看UB960解串器集线器 系统级用例培训系列的第2模块。 在模块1中,我们介绍了UB960提供的 一些可能性,包括聚合和复制。 现在让我们看看我们如何创建一个演示系统 来展示其中的一些功能。 让我们快速回顾一下其中一个复制用例。 在该系统中,相同的多信道视频 在两个不同的视频处理器上 根据两种不同的目的,以两种不同的方式被处理。 例如,我着眼于2号 其可能是TDA2P或TDA3设备,可能正在使用 传统的[听不清]功能, 用聚合的4信道视频,通过复制模式传播到 CSI的端口1。 在此应用中,非常重要的是 最终输出对于人类观察者来说的形态, 并且这个最终输出确实有被发送到显示器。 因此,该级的图像质量和无缝性 是应用的焦点。 同时,处理4信道视频的 另一个目的 可以是检测场景中的对象, 这可能是自动停车应用中的情况。 该处理过程使用聚合4信道视频传播到CSI端口0, 在SoC编号1上执行。 该视频处理与传统环绕视图 非常不同, 并且对象检测通常涉及 机器学习或甚至深度学习。 适合于人工智能的图像 可以被预处理的方式与要吸引人类用户 并可能不会被发送到显示器的图像 非常不同。 在TI,我们已经组建了一个演示系统 来测试复制模式。 演示系统包括三个TI EVM、四个摄像头 模块、四个HDMI监视器和两个定制MIPI电缆。 让我们从解串器集线器EVM开始, 可以使用UB960或UB964 EVM,具体取决于 摄像机分辨率。 在图中,我们有UB960 EVM, 并且正在CSI-0和CSI-1端口上 使用顶部MIPI连接器。 该EVM还具有用于CSI端口0的底侧MIPI连接器, 因此它可以直接与TDA2 EVM或TDA3 EVM配对。 但这需要硬件修改,因此对于此演示, 我们没有采用该选项。 如果您在相机上使用的串行器不是953, 则EVM可能需要的另一个修改 是POC过滤网络。 UB960连接到两个TDA3 EVM。 我们有一个MIPI… 60针MIPI连接器和Symtec的定制电缆。 电缆是从Symtec在线订购的, 此处给出的链接指向一个文档, 其中列出了各种电缆选项和随附的 部件号。 对于这个演示,我们可能 不幸地选择了终端边缘电缆端。 并且插座边缘也是可用的, 这将允许电缆被平放 而不是像图中那样朝上放着。 EVM本身可以是TDA2P或TDA3。 它们都具有用于CSI和I2C信号的 相同MIPI连接器。 在这里,我们展示了TDA3 EVM。 我们将把它们称为主要和次要EVM,具体取决于 它们连接到的UB960上的是哪些I2C信号。 TDA3是一种低成本SoC选项,适用于2D环绕视图 或基本分析。 如果需要3D环绕视图或更高级的分析, TDA2P EVM将更合适。 最后,这里的相机模块是MARS模块, 可以从[听不清]中进行订购。 它们由130万像素的AR0143传感器 和一个913串行器组成,它们一共有四个。 Division SDK软件包中提供了 对这些相机的开箱即用支持。 用于此演示的版本是3.06, 因为其对各种多信道用例提供了良好的开箱即用 支持。 让我们仔细看看处理器如何…在我们的例子中 是两个TDA3… 其如何与UB960以及 作为共享资源的摄像机进行交互。 两个SoC都可以访问UB960寄存器以及I2C总线。 MIPI连接器不仅承载CSI数据, 还承载两个I2C,时钟和数据。 UB960总共有四个I2C引脚 可用于主时钟和辅助时钟 和数据总线。 这些I2C具有相同的地址,并且都可以访问 反向信道。 唯一的不对称功能是无法通过 辅助总线访问数字复位寄存器。 然而,通过BCC 0、1、2或3个MAP位字段 可以一次向一个I2C总线授予反向信道访问权。 默认为主I2C总线。 如果在系统级别,我们希望两个SoC 都与传感器通信,则需要 实现某种信号交换协议。 至少,信号交换是必要的,以确保 如果一个SoC打开两个CSI发送端口, 另一个SoC CSI接收器会被充电并初始化。 否则,将不会发生发送器和接收器CSI之间的 信号交换。 此演示的目标是使复制模式 在Vision SDK软件的最小变化下工作, 该软件具有对传统环绕视图用例的TDA3、 UB960和MARS摄像机的开箱即用支持。 我们决定在两个处理器上运行 两个不同的图像以将变化最小化, 并且,源代码仅在两个地方进行了修改。 辅助EVM软件被修改为 实际上不与传感器通信。 它仍然可以与960通信 并启动其自己的CSI接收器, 但不使用反向信道, 因此,BCC 0、1、2、3 MAP字段未被更改。 因此,辅助EVM在没有视频的情况下 启动其用例,并且视频仅在 主EVM准备好系统后才会显示。 主要EVM正在执行实际的UB960 初始化,包括启动传感器、 接收端口、CSI端口以及启用复制模式。 现在让我们实际来看看这个设置。 我这里打开了两个[听不清]控制台来观看Vision SDK 固件映像,并输入命令。 与此同时,我们将关注连接到 两个TDA3端口的两个HDMI监视器。 大型监视器连接到主EVM, 较小的监视器连接到辅助EVM, 它们将分别运行4信道 和单信道用例。 首先,我们将启动并启动辅助EV。 那么这是主要的Vision SDK菜单,首先要做的是 选择合适的捕获源。 因此,我将使用S进行系统设置, 2进行捕获设置,然后使用C进行MARS摄像。 接下来,我们选择用例, 因此我们将为ISS用例选择5, 为单信道ISS用例选择1。 现在,我们在HDMI监视器上 看到图形叠加层,并且由于辅助EVM没有 直接与摄像机对话,因此在主要EVM启动 并初始化解串器和传感器之前, 视频捕获将无法使用。 所以现在,我们将启动主要EVM, 并采用与以前类似的程序。 这是Vision SDK的主要菜单。 首先,我们选择捕获源… S用于系统设置,2用于捕获设置, C用于MARS摄像机。 现在,我们来选择用例… 为ISS用例选择5,然后再选择5 以用于Surround View Calibration, 这是我们将用于 此演示的4信道用例。 所以现在,主EVM正在与960 以及传感器交谈,而现在, 它已经打开了复制模式。 因此,视频显示在辅助EVM上, 同时,主要EVM正在初始化… 完成其自己的用例的初始化, 并且很快就会完成。 有了。 现在,我们通过CSI端口0在主EVM上 运行4信道用例,通过CSI端口1 在辅助EVM上运行单信道用例。 所有这些都由UB960的复制模式功能达成的。
大家好,欢迎收看UB960解串器集线器
系统级用例培训系列的第2模块。
在模块1中,我们介绍了UB960提供的
一些可能性,包括聚合和复制。
现在让我们看看我们如何创建一个演示系统
来展示其中的一些功能。
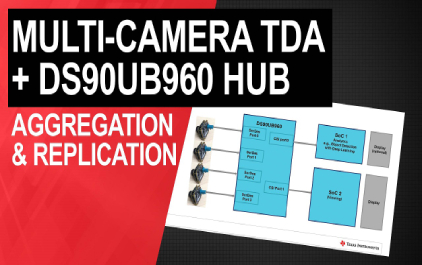
让我们快速回顾一下其中一个复制用例。
在该系统中,相同的多信道视频
在两个不同的视频处理器上
根据两种不同的目的,以两种不同的方式被处理。
例如,我着眼于2号
其可能是TDA2P或TDA3设备,可能正在使用
传统的[听不清]功能,
用聚合的4信道视频,通过复制模式传播到
CSI的端口1。
在此应用中,非常重要的是
最终输出对于人类观察者来说的形态,
并且这个最终输出确实有被发送到显示器。
因此,该级的图像质量和无缝性
是应用的焦点。
同时,处理4信道视频的
另一个目的
可以是检测场景中的对象,
这可能是自动停车应用中的情况。
该处理过程使用聚合4信道视频传播到CSI端口0,
在SoC编号1上执行。
该视频处理与传统环绕视图
非常不同,
并且对象检测通常涉及
机器学习或甚至深度学习。
适合于人工智能的图像
可以被预处理的方式与要吸引人类用户
并可能不会被发送到显示器的图像
非常不同。
在TI,我们已经组建了一个演示系统
来测试复制模式。
演示系统包括三个TI EVM、四个摄像头
模块、四个HDMI监视器和两个定制MIPI电缆。
让我们从解串器集线器EVM开始,
可以使用UB960或UB964 EVM,具体取决于
摄像机分辨率。
在图中,我们有UB960 EVM,
并且正在CSI-0和CSI-1端口上
使用顶部MIPI连接器。
该EVM还具有用于CSI端口0的底侧MIPI连接器,
因此它可以直接与TDA2 EVM或TDA3 EVM配对。
但这需要硬件修改,因此对于此演示,
我们没有采用该选项。
如果您在相机上使用的串行器不是953,
则EVM可能需要的另一个修改
是POC过滤网络。
UB960连接到两个TDA3 EVM。
我们有一个MIPI…
60针MIPI连接器和Symtec的定制电缆。
电缆是从Symtec在线订购的,
此处给出的链接指向一个文档,
其中列出了各种电缆选项和随附的
部件号。
对于这个演示,我们可能
不幸地选择了终端边缘电缆端。
并且插座边缘也是可用的,
这将允许电缆被平放
而不是像图中那样朝上放着。
EVM本身可以是TDA2P或TDA3。
它们都具有用于CSI和I2C信号的
相同MIPI连接器。
在这里,我们展示了TDA3 EVM。
我们将把它们称为主要和次要EVM,具体取决于
它们连接到的UB960上的是哪些I2C信号。
TDA3是一种低成本SoC选项,适用于2D环绕视图
或基本分析。
如果需要3D环绕视图或更高级的分析,
TDA2P EVM将更合适。
最后,这里的相机模块是MARS模块,
可以从[听不清]中进行订购。
它们由130万像素的AR0143传感器
和一个913串行器组成,它们一共有四个。
Division SDK软件包中提供了
对这些相机的开箱即用支持。
用于此演示的版本是3.06,
因为其对各种多信道用例提供了良好的开箱即用
支持。
让我们仔细看看处理器如何…在我们的例子中
是两个TDA3…
其如何与UB960以及
作为共享资源的摄像机进行交互。
两个SoC都可以访问UB960寄存器以及I2C总线。
MIPI连接器不仅承载CSI数据,
还承载两个I2C,时钟和数据。
UB960总共有四个I2C引脚
可用于主时钟和辅助时钟
和数据总线。
这些I2C具有相同的地址,并且都可以访问
反向信道。
唯一的不对称功能是无法通过
辅助总线访问数字复位寄存器。
然而,通过BCC 0、1、2或3个MAP位字段
可以一次向一个I2C总线授予反向信道访问权。
默认为主I2C总线。
如果在系统级别,我们希望两个SoC
都与传感器通信,则需要
实现某种信号交换协议。
至少,信号交换是必要的,以确保
如果一个SoC打开两个CSI发送端口,
另一个SoC CSI接收器会被充电并初始化。
否则,将不会发生发送器和接收器CSI之间的
信号交换。
此演示的目标是使复制模式
在Vision SDK软件的最小变化下工作,
该软件具有对传统环绕视图用例的TDA3、
UB960和MARS摄像机的开箱即用支持。
我们决定在两个处理器上运行
两个不同的图像以将变化最小化,
并且,源代码仅在两个地方进行了修改。
辅助EVM软件被修改为
实际上不与传感器通信。
它仍然可以与960通信
并启动其自己的CSI接收器,
但不使用反向信道,
因此,BCC 0、1、2、3 MAP字段未被更改。
因此,辅助EVM在没有视频的情况下
启动其用例,并且视频仅在
主EVM准备好系统后才会显示。
主要EVM正在执行实际的UB960
初始化,包括启动传感器、
接收端口、CSI端口以及启用复制模式。
现在让我们实际来看看这个设置。
我这里打开了两个[听不清]控制台来观看Vision SDK
固件映像,并输入命令。
与此同时,我们将关注连接到
两个TDA3端口的两个HDMI监视器。
大型监视器连接到主EVM,
较小的监视器连接到辅助EVM,
它们将分别运行4信道
和单信道用例。
首先,我们将启动并启动辅助EV。
那么这是主要的Vision SDK菜单,首先要做的是
选择合适的捕获源。
因此,我将使用S进行系统设置,
2进行捕获设置,然后使用C进行MARS摄像。
接下来,我们选择用例,
因此我们将为ISS用例选择5,
为单信道ISS用例选择1。
现在,我们在HDMI监视器上
看到图形叠加层,并且由于辅助EVM没有
直接与摄像机对话,因此在主要EVM启动
并初始化解串器和传感器之前,
视频捕获将无法使用。
所以现在,我们将启动主要EVM,
并采用与以前类似的程序。
这是Vision SDK的主要菜单。
首先,我们选择捕获源…
S用于系统设置,2用于捕获设置,
C用于MARS摄像机。
现在,我们来选择用例…
为ISS用例选择5,然后再选择5
以用于Surround View Calibration,
这是我们将用于
此演示的4信道用例。
所以现在,主EVM正在与960
以及传感器交谈,而现在,
它已经打开了复制模式。
因此,视频显示在辅助EVM上,
同时,主要EVM正在初始化…
完成其自己的用例的初始化,
并且很快就会完成。
有了。
现在,我们通过CSI端口0在主EVM上
运行4信道用例,通过CSI端口1
在辅助EVM上运行单信道用例。
所有这些都由UB960的复制模式功能达成的。
大家好,欢迎收看UB960解串器集线器 系统级用例培训系列的第2模块。 在模块1中,我们介绍了UB960提供的 一些可能性,包括聚合和复制。 现在让我们看看我们如何创建一个演示系统 来展示其中的一些功能。 让我们快速回顾一下其中一个复制用例。 在该系统中,相同的多信道视频 在两个不同的视频处理器上 根据两种不同的目的,以两种不同的方式被处理。 例如,我着眼于2号 其可能是TDA2P或TDA3设备,可能正在使用 传统的[听不清]功能, 用聚合的4信道视频,通过复制模式传播到 CSI的端口1。 在此应用中,非常重要的是 最终输出对于人类观察者来说的形态, 并且这个最终输出确实有被发送到显示器。 因此,该级的图像质量和无缝性 是应用的焦点。 同时,处理4信道视频的 另一个目的 可以是检测场景中的对象, 这可能是自动停车应用中的情况。 该处理过程使用聚合4信道视频传播到CSI端口0, 在SoC编号1上执行。 该视频处理与传统环绕视图 非常不同, 并且对象检测通常涉及 机器学习或甚至深度学习。 适合于人工智能的图像 可以被预处理的方式与要吸引人类用户 并可能不会被发送到显示器的图像 非常不同。 在TI,我们已经组建了一个演示系统 来测试复制模式。 演示系统包括三个TI EVM、四个摄像头 模块、四个HDMI监视器和两个定制MIPI电缆。 让我们从解串器集线器EVM开始, 可以使用UB960或UB964 EVM,具体取决于 摄像机分辨率。 在图中,我们有UB960 EVM, 并且正在CSI-0和CSI-1端口上 使用顶部MIPI连接器。 该EVM还具有用于CSI端口0的底侧MIPI连接器, 因此它可以直接与TDA2 EVM或TDA3 EVM配对。 但这需要硬件修改,因此对于此演示, 我们没有采用该选项。 如果您在相机上使用的串行器不是953, 则EVM可能需要的另一个修改 是POC过滤网络。 UB960连接到两个TDA3 EVM。 我们有一个MIPI… 60针MIPI连接器和Symtec的定制电缆。 电缆是从Symtec在线订购的, 此处给出的链接指向一个文档, 其中列出了各种电缆选项和随附的 部件号。 对于这个演示,我们可能 不幸地选择了终端边缘电缆端。 并且插座边缘也是可用的, 这将允许电缆被平放 而不是像图中那样朝上放着。 EVM本身可以是TDA2P或TDA3。 它们都具有用于CSI和I2C信号的 相同MIPI连接器。 在这里,我们展示了TDA3 EVM。 我们将把它们称为主要和次要EVM,具体取决于 它们连接到的UB960上的是哪些I2C信号。 TDA3是一种低成本SoC选项,适用于2D环绕视图 或基本分析。 如果需要3D环绕视图或更高级的分析, TDA2P EVM将更合适。 最后,这里的相机模块是MARS模块, 可以从[听不清]中进行订购。 它们由130万像素的AR0143传感器 和一个913串行器组成,它们一共有四个。 Division SDK软件包中提供了 对这些相机的开箱即用支持。 用于此演示的版本是3.06, 因为其对各种多信道用例提供了良好的开箱即用 支持。 让我们仔细看看处理器如何…在我们的例子中 是两个TDA3… 其如何与UB960以及 作为共享资源的摄像机进行交互。 两个SoC都可以访问UB960寄存器以及I2C总线。 MIPI连接器不仅承载CSI数据, 还承载两个I2C,时钟和数据。 UB960总共有四个I2C引脚 可用于主时钟和辅助时钟 和数据总线。 这些I2C具有相同的地址,并且都可以访问 反向信道。 唯一的不对称功能是无法通过 辅助总线访问数字复位寄存器。 然而,通过BCC 0、1、2或3个MAP位字段 可以一次向一个I2C总线授予反向信道访问权。 默认为主I2C总线。 如果在系统级别,我们希望两个SoC 都与传感器通信,则需要 实现某种信号交换协议。 至少,信号交换是必要的,以确保 如果一个SoC打开两个CSI发送端口, 另一个SoC CSI接收器会被充电并初始化。 否则,将不会发生发送器和接收器CSI之间的 信号交换。 此演示的目标是使复制模式 在Vision SDK软件的最小变化下工作, 该软件具有对传统环绕视图用例的TDA3、 UB960和MARS摄像机的开箱即用支持。 我们决定在两个处理器上运行 两个不同的图像以将变化最小化, 并且,源代码仅在两个地方进行了修改。 辅助EVM软件被修改为 实际上不与传感器通信。 它仍然可以与960通信 并启动其自己的CSI接收器, 但不使用反向信道, 因此,BCC 0、1、2、3 MAP字段未被更改。 因此,辅助EVM在没有视频的情况下 启动其用例,并且视频仅在 主EVM准备好系统后才会显示。 主要EVM正在执行实际的UB960 初始化,包括启动传感器、 接收端口、CSI端口以及启用复制模式。 现在让我们实际来看看这个设置。 我这里打开了两个[听不清]控制台来观看Vision SDK 固件映像,并输入命令。 与此同时,我们将关注连接到 两个TDA3端口的两个HDMI监视器。 大型监视器连接到主EVM, 较小的监视器连接到辅助EVM, 它们将分别运行4信道 和单信道用例。 首先,我们将启动并启动辅助EV。 那么这是主要的Vision SDK菜单,首先要做的是 选择合适的捕获源。 因此,我将使用S进行系统设置, 2进行捕获设置,然后使用C进行MARS摄像。 接下来,我们选择用例, 因此我们将为ISS用例选择5, 为单信道ISS用例选择1。 现在,我们在HDMI监视器上 看到图形叠加层,并且由于辅助EVM没有 直接与摄像机对话,因此在主要EVM启动 并初始化解串器和传感器之前, 视频捕获将无法使用。 所以现在,我们将启动主要EVM, 并采用与以前类似的程序。 这是Vision SDK的主要菜单。 首先,我们选择捕获源… S用于系统设置,2用于捕获设置, C用于MARS摄像机。 现在,我们来选择用例… 为ISS用例选择5,然后再选择5 以用于Surround View Calibration, 这是我们将用于 此演示的4信道用例。 所以现在,主EVM正在与960 以及传感器交谈,而现在, 它已经打开了复制模式。 因此,视频显示在辅助EVM上, 同时,主要EVM正在初始化… 完成其自己的用例的初始化, 并且很快就会完成。 有了。 现在,我们通过CSI端口0在主EVM上 运行4信道用例,通过CSI端口1 在辅助EVM上运行单信道用例。 所有这些都由UB960的复制模式功能达成的。
大家好,欢迎收看UB960解串器集线器
系统级用例培训系列的第2模块。
在模块1中,我们介绍了UB960提供的
一些可能性,包括聚合和复制。
现在让我们看看我们如何创建一个演示系统
来展示其中的一些功能。
让我们快速回顾一下其中一个复制用例。
在该系统中,相同的多信道视频
在两个不同的视频处理器上
根据两种不同的目的,以两种不同的方式被处理。
例如,我着眼于2号
其可能是TDA2P或TDA3设备,可能正在使用
传统的[听不清]功能,
用聚合的4信道视频,通过复制模式传播到
CSI的端口1。
在此应用中,非常重要的是
最终输出对于人类观察者来说的形态,
并且这个最终输出确实有被发送到显示器。
因此,该级的图像质量和无缝性
是应用的焦点。
同时,处理4信道视频的
另一个目的
可以是检测场景中的对象,
这可能是自动停车应用中的情况。
该处理过程使用聚合4信道视频传播到CSI端口0,
在SoC编号1上执行。
该视频处理与传统环绕视图
非常不同,
并且对象检测通常涉及
机器学习或甚至深度学习。
适合于人工智能的图像
可以被预处理的方式与要吸引人类用户
并可能不会被发送到显示器的图像
非常不同。
在TI,我们已经组建了一个演示系统
来测试复制模式。
演示系统包括三个TI EVM、四个摄像头
模块、四个HDMI监视器和两个定制MIPI电缆。
让我们从解串器集线器EVM开始,
可以使用UB960或UB964 EVM,具体取决于
摄像机分辨率。
在图中,我们有UB960 EVM,
并且正在CSI-0和CSI-1端口上
使用顶部MIPI连接器。
该EVM还具有用于CSI端口0的底侧MIPI连接器,
因此它可以直接与TDA2 EVM或TDA3 EVM配对。
但这需要硬件修改,因此对于此演示,
我们没有采用该选项。
如果您在相机上使用的串行器不是953,
则EVM可能需要的另一个修改
是POC过滤网络。
UB960连接到两个TDA3 EVM。
我们有一个MIPI…
60针MIPI连接器和Symtec的定制电缆。
电缆是从Symtec在线订购的,
此处给出的链接指向一个文档,
其中列出了各种电缆选项和随附的
部件号。
对于这个演示,我们可能
不幸地选择了终端边缘电缆端。
并且插座边缘也是可用的,
这将允许电缆被平放
而不是像图中那样朝上放着。
EVM本身可以是TDA2P或TDA3。
它们都具有用于CSI和I2C信号的
相同MIPI连接器。
在这里,我们展示了TDA3 EVM。
我们将把它们称为主要和次要EVM,具体取决于
它们连接到的UB960上的是哪些I2C信号。
TDA3是一种低成本SoC选项,适用于2D环绕视图
或基本分析。
如果需要3D环绕视图或更高级的分析,
TDA2P EVM将更合适。
最后,这里的相机模块是MARS模块,
可以从[听不清]中进行订购。
它们由130万像素的AR0143传感器
和一个913串行器组成,它们一共有四个。
Division SDK软件包中提供了
对这些相机的开箱即用支持。
用于此演示的版本是3.06,
因为其对各种多信道用例提供了良好的开箱即用
支持。
让我们仔细看看处理器如何…在我们的例子中
是两个TDA3…
其如何与UB960以及
作为共享资源的摄像机进行交互。
两个SoC都可以访问UB960寄存器以及I2C总线。
MIPI连接器不仅承载CSI数据,
还承载两个I2C,时钟和数据。
UB960总共有四个I2C引脚
可用于主时钟和辅助时钟
和数据总线。
这些I2C具有相同的地址,并且都可以访问
反向信道。
唯一的不对称功能是无法通过
辅助总线访问数字复位寄存器。
然而,通过BCC 0、1、2或3个MAP位字段
可以一次向一个I2C总线授予反向信道访问权。
默认为主I2C总线。
如果在系统级别,我们希望两个SoC
都与传感器通信,则需要
实现某种信号交换协议。
至少,信号交换是必要的,以确保
如果一个SoC打开两个CSI发送端口,
另一个SoC CSI接收器会被充电并初始化。
否则,将不会发生发送器和接收器CSI之间的
信号交换。
此演示的目标是使复制模式
在Vision SDK软件的最小变化下工作,
该软件具有对传统环绕视图用例的TDA3、
UB960和MARS摄像机的开箱即用支持。
我们决定在两个处理器上运行
两个不同的图像以将变化最小化,
并且,源代码仅在两个地方进行了修改。
辅助EVM软件被修改为
实际上不与传感器通信。
它仍然可以与960通信
并启动其自己的CSI接收器,
但不使用反向信道,
因此,BCC 0、1、2、3 MAP字段未被更改。
因此,辅助EVM在没有视频的情况下
启动其用例,并且视频仅在
主EVM准备好系统后才会显示。
主要EVM正在执行实际的UB960
初始化,包括启动传感器、
接收端口、CSI端口以及启用复制模式。
现在让我们实际来看看这个设置。
我这里打开了两个[听不清]控制台来观看Vision SDK
固件映像,并输入命令。
与此同时,我们将关注连接到
两个TDA3端口的两个HDMI监视器。
大型监视器连接到主EVM,
较小的监视器连接到辅助EVM,
它们将分别运行4信道
和单信道用例。
首先,我们将启动并启动辅助EV。
那么这是主要的Vision SDK菜单,首先要做的是
选择合适的捕获源。
因此,我将使用S进行系统设置,
2进行捕获设置,然后使用C进行MARS摄像。
接下来,我们选择用例,
因此我们将为ISS用例选择5,
为单信道ISS用例选择1。
现在,我们在HDMI监视器上
看到图形叠加层,并且由于辅助EVM没有
直接与摄像机对话,因此在主要EVM启动
并初始化解串器和传感器之前,
视频捕获将无法使用。
所以现在,我们将启动主要EVM,
并采用与以前类似的程序。
这是Vision SDK的主要菜单。
首先,我们选择捕获源…
S用于系统设置,2用于捕获设置,
C用于MARS摄像机。
现在,我们来选择用例…
为ISS用例选择5,然后再选择5
以用于Surround View Calibration,
这是我们将用于
此演示的4信道用例。
所以现在,主EVM正在与960
以及传感器交谈,而现在,
它已经打开了复制模式。
因此,视频显示在辅助EVM上,
同时,主要EVM正在初始化…
完成其自己的用例的初始化,
并且很快就会完成。
有了。
现在,我们通过CSI端口0在主EVM上
运行4信道用例,通过CSI端口1
在辅助EVM上运行单信道用例。
所有这些都由UB960的复制模式功能达成的。
手机看
扫码用手机观看
 视频简介
视频简介
1.2 采用DS90UB960解串器集线器和TDA SoC的多摄像头系统:演示
所属课程:具有DS90UB960解串器集线器和TDA SoC的多摄像头系统:系列培训
发布时间:2019.08.07
视频集数:2
本节视频时长:00:09:56
该培训描述了一个演示系统,用于在端到端系统中测试DS90UB960复制模式,该系统包括摄像头,LVDS链路,TI视觉处理SoC和显示器。 该系统由TI EVM和现成设备组成。



 未学习 1.1 具有DS90UB960解串器集线器和TDA SoC的多摄像头系统:聚合和复制
未学习 1.1 具有DS90UB960解串器集线器和TDA SoC的多摄像头系统:聚合和复制
 未学习 1.2 采用DS90UB960解串器集线器和TDA SoC的多摄像头系统:演示
未学习 1.2 采用DS90UB960解串器集线器和TDA SoC的多摄像头系统:演示


