1.2使用高性能前端的成像雷达
Loading the player...
将在30s后自动为您播放下一课程
下面呢,我有一个展示的 视频可以给大家看一下 这一页呢,是给大家看到的 就是我们的前面介绍的 这个多片级联的这样的一个板子 那这个是我们在室外 测试的时候的一个场景 那这个是在一个停车场的环境底下,我们可以看到可以有可以看到 非常多的这样的一个细节。 那这个是有人在雷达前面 进行行走的时候,我们可以看到有可以看到人的大致的这样一个轮廓 可以看到车辆的这样的一个轮廓。 它这个分辨率非常高 这个是单片雷达所无法实现的。 那这个呢,是我们采用 波束赋形的方式, 可以进行一个角度范围的 这样的一个扫描 下面呢,就是这个雷达的 最远探测距离的这样一个测试 我们看到两辆车子呢, 在往前运动的时候呢, 我们的检测信号呢从 250 米 一直到 300 米还可以获得 非常高的这样的一个反射的能量, 也就是说可以被我的雷达检测到 那这个级联的这个就是 刚才讲的这些级联的方案呢 我们TI现在正在 进行一些资料的整理 我们预计会在后面的几个月 当中呢 正式发布在网上 我的最后一部分呢,我会给大家介绍一下我们的毫米波雷达呢 用在车内的各种应用场景 那么前面讲到的这些呢 主要是传统的adas 领域的 也就是车辆的控制这些 领域的这个应用场景 那么除此之外呢,因为毫米波 雷达有非常高的检测精度 那么越来越多的一些 新的车内的应用呢 也被现在被逐渐地发掘出来 那么车内应用第一个, 我给大家介绍一下 就是车内的乘员检测。那么, 我们经常会看到一些报道 像国外和国内,经常会 看到一些报道,就是说 我们有一些家长呢比较粗心, 把小朋友呢落在了这个车辆的后座 然后这样呢,如果家长离开了 之后呢 把车门反锁起来 会带来非常大的风险。 那么毫米波雷达可以呢 进行这个车内的乘员检测, 也就是活体检测 那么,因为人在车辆后座当中呢, 在这个位置的时候呢 因为我们的人呢,总会有一些运动。 我不管你是睡着了 还是没有睡着,都会有些运动, 你会有心跳有呼吸 那么这些运动的信号呢,在毫米波 雷达上面的反射呢非常强烈 我们可以看到左边下面的这个图, 这两个人呢在这个车辆当中呢 我们可以看到有非常强的 这个反射的能量点 那么通过这个能量点呢,我们就可以 把它跟周围环境给区分开来 如果是你放一个箱子, 放在这个车辆的后座当中呢 因为这个箱子是静止的,那么它在 雷达上面呢反射就非常弱 那么,这个参考设计呢,就是我们的 TI DEP 01001 的参考设计 就是针对这个车辆的 乘员检测所提供的一个参考设计 我们已经把这个所有 参考设计的源代码呢 都放在了我们的网站上面给大家参考。 那么这个车辆的乘员检测呢 现在除了毫米波雷达技术之外呢,还有一些客户呢会考虑用摄像头来做 那么但是呢,需要注意的一点呢, 就是说摄像头因为 在车辆在车内采集这个 识别信号的时候呢,会涉及到 个人的隐私问题,那么有很多的 客户车主可能非常不舒服说你这个摄像头 一直对着这个车辆在照。 那么同时呢摄像头呢 在一些特定的场景, 比如说在黑暗的车库当中 或者是在光线非常强的地方呢, 这个摄像头的检测呢 可能会失效。而毫米波雷达呢, 是我们现在所有传感器当中呢 受周围环境的影响最小的一个技术 它可以克服摄像头的这些 环境因素影响的这些问题 那么我们可以看到这个车内的 乘员检测呢现在已经越来越流行 那么特别是在欧洲,那么已经被 写入了一个新的NKF2005 这样的一个安全认证,也就是说, 以后在2025 年的时候 那么这个所有的车上都 需要装这个车内乘员检测的这样 一个系统 第二个参考设计呢,就是我们的 这个驾驶员的叫Vital Sign 也就是心跳和 呼吸检测的这样的一个系统 那我们可以了解到,现在呢 在路面上的交通事故当中 大概有30 %是因为 驾驶员突发心脏疾病所导致的 那么毫米波雷达呢有 非常高的探测精度 可以检测到你人的 这个胸口的起伏震动 那么拿到这些起伏 震动数据的之后呢 我们再结合获得的算法就可以去分析出来驾驶员的呼吸频率和心跳的频率 这个毫米波去做 这个系统的优势是 我们是一个非接触式的系统 不需要在你的身上去绑各种 什么探测带啊或者是什么的, 那驾驶员呢感觉不到 那么,我们在车上的安装位置呢 可以安装在这个车子的比如说 前面的仪表盘上面,也可以安装在 车子后面的这个座椅上面 都可以隐藏起来。也就是说让 驾驶员不会影响到驾驶员 正常的开车的这样的一个应用 这个算法设计,我们也已经就 是放在了TI的网站上面 第三个参考设计呢, 就是说手势识别 因为毫米波呢可以非常精确地检测出来你的这个手势的这个运动的位置 还有你这个运动的速度。 那么我们的各种手势呢 比如说向右或者向左,每一种手势呢 都有它自己的这个模型 那么我们在进行研究和训练之后呢, 我们把各种手势的这个模型呢 存储在我们的这个芯片当中 当用户有发生一种手势的时候呢,我们将各种的这个获取运动和位置信息 跟我们已经保存的 这个模型呢去进行比对 匹配上了之后呢, 我就认为是一种手势 那么现在呢,在我们的这个参考设计呢, 我们现在实现了 那个人手的往左挥、往右挥、 上挥、下挥、手指的顺时针旋转 和反时针旋转总共六种手势。 那么这些手势呢, 可以去对车辆的仪表盘, 对车辆的这个娱乐系统 和空调系统呢进行控制 比如说我可以去控制这个车辆的 音乐的这个音量。那同时呢 这个毫米波呢也可以去做 这个开车门的这样的 一个就是kick open 也就是说你脚踢下,然后我的这个 后备箱门就自动打开了 这样的应用场景 第四项呢,就是说我们的 毫米波雷达可以进行车辆的 障碍物检测 这个呢,跟我们刚才讲过的 停车的应用呢非常非常像 那么我们可以检测出来 车辆周边的一些障碍物 因为我们的在车上面呢 现在有越来越多的这些电动门 被安装起来了。那这些 电动门呢,在打开的过程当中 因为它是自己打开的, 没有人来控制 所以说,如果碰撞到周围的 这个车辆或者行人呢 造成非常严重的 这样的一个安全隐患 那么通过把毫米波雷达放在 车上呢,我就可以去检测周围的 一个扇形空间当中的一个目标 检测到有目标出现了之后呢, 就可以及时的把我的电动门停止下来 那么这里会介绍到 我们TI有一块叫 AWR1642 ODS 这样一个开发板 那么前面介绍的这个 我们刚才有一张照片当中给出来 这个开发板呢, 是基于我们的普通天线来做的 那么它的最远探测距离可以做到129m 但是对于这种车子的 障碍物检测这一类的应用当中 可能我的探测距离 并不需要做的那么远 但是呢我需要有一个非常大的 FOV 因为我要尽可能的去观察 更多的车辆周边的 这样一个情况 那么在我们的 这个ODS 开发板上 可以实现±70°也就是总共 140°的 这个水平方向的视角 那么±40°也就是总共 垂直方向80°的视角 那么通过这个ODS 这个板子天线设计呢 我就可以把我们的这个车辆 周围的这样的一个环境呢 能够完整地分析清楚。 那么这个参考设计呢 包括我们的这个硬件设计资料呢, 我们现在已经把它放到了 TI DEP0104这个位置当中, 大家可以下载进行研究。 刚才介绍到的这些呢,就是我们TI 现在在毫米波雷达技术当中呢 现在我们研究的一些应用方向, 以及我们的对应的 这样的一个参考设计 那么大家肯定非常关心 就是说我今天介绍的这些参考设计呢 在哪个地方可以下载到 那么我给大家提供一个链接, 我们有一个叫 TI resource explorer 简称就叫REX这样的一个网站 那么在这个网站上面呢,可以把我 刚才所介绍到的这些所有TI 公开的这个毫米波雷达 这些参考设计呢,包括源代码, 包括它的设计文档, 还有它的这个测试报告 都能够下载到。 那除了这个链接呢之外呢 我们还有一些其他的 非常有帮助的链接 首先就是我们有一个 TI的e-to-e 的论坛 那么e-to-e它的简称呢 就是engineer-to-engineer 就是客户的工程师跟 TI的 工程师呢沟通的一个渠道 那么我们在e-to-e的 论坛当中呢,可以找到很多就是 关于我们有以前的客户 所提的关于TI 的毫米波雷达技术 或者是关于一些雷达理论的这些问题 那么呢 我可以说大家现在所开发过程 当中呢所遇到的大部分问题呢 在e-to-e的论坛上面都已经有答案了 那么,如果你有一些新的问题呢, 我们也可以在e-to-e 论坛上面去提问,跟我们的 产品线的工程师 进行二十四小时的在线的沟通。 下面呢,是我们给出了我们的 一个现在整个产品系列 包括AWR汽车和IWR工业的 这个在我们TI的网站上面 所有的一些下载资料, 那么大家可以看到我们TI 在毫米波雷达技术我们的 这个资料呢,是非常开放的 我们把我们每一个 在我们在网站上面呢 去用我们的这个产品的 这个型号的呢去进行搜索 可以找到每一个产品型号呢 所对应的所有的数据手册啊 EVM板的资料啊, 还有这些软件包 大家用的最多的这个软件包呢, 就是下面的这个叫mmWave的 sdk 这个 sdk开发包当中呢 会包含 我们的芯片的所有的驱动模块 我们这个雷达的波形的 这些发波的控制模块 后端的这个处理的这些信号链, 以及我们集成的一个完整的 一个参考设计,那么客户拿到了 之后呢,可以在上面进行修改 去实现这样一个系统。那么 这个下载链接呢,是在这里头。 我今天呢这个介绍内容呢, 主要就是在这些。 那很感谢大家参加 今天的这样一个 在线的这样的一个论坛。
下面呢,我有一个展示的 视频可以给大家看一下 这一页呢,是给大家看到的 就是我们的前面介绍的 这个多片级联的这样的一个板子 那这个是我们在室外 测试的时候的一个场景 那这个是在一个停车场的环境底下,我们可以看到可以有可以看到 非常多的这样的一个细节。 那这个是有人在雷达前面 进行行走的时候,我们可以看到有可以看到人的大致的这样一个轮廓 可以看到车辆的这样的一个轮廓。 它这个分辨率非常高 这个是单片雷达所无法实现的。 那这个呢,是我们采用 波束赋形的方式, 可以进行一个角度范围的 这样的一个扫描 下面呢,就是这个雷达的 最远探测距离的这样一个测试 我们看到两辆车子呢, 在往前运动的时候呢, 我们的检测信号呢从 250 米 一直到 300 米还可以获得 非常高的这样的一个反射的能量, 也就是说可以被我的雷达检测到 那这个级联的这个就是 刚才讲的这些级联的方案呢 我们TI现在正在 进行一些资料的整理 我们预计会在后面的几个月 当中呢 正式发布在网上 我的最后一部分呢,我会给大家介绍一下我们的毫米波雷达呢 用在车内的各种应用场景 那么前面讲到的这些呢 主要是传统的adas 领域的 也就是车辆的控制这些 领域的这个应用场景 那么除此之外呢,因为毫米波 雷达有非常高的检测精度 那么越来越多的一些 新的车内的应用呢 也被现在被逐渐地发掘出来 那么车内应用第一个, 我给大家介绍一下 就是车内的乘员检测。那么, 我们经常会看到一些报道 像国外和国内,经常会 看到一些报道,就是说 我们有一些家长呢比较粗心, 把小朋友呢落在了这个车辆的后座 然后这样呢,如果家长离开了 之后呢 把车门反锁起来 会带来非常大的风险。 那么毫米波雷达可以呢 进行这个车内的乘员检测, 也就是活体检测 那么,因为人在车辆后座当中呢, 在这个位置的时候呢 因为我们的人呢,总会有一些运动。 我不管你是睡着了 还是没有睡着,都会有些运动, 你会有心跳有呼吸 那么这些运动的信号呢,在毫米波 雷达上面的反射呢非常强烈 我们可以看到左边下面的这个图, 这两个人呢在这个车辆当中呢 我们可以看到有非常强的 这个反射的能量点 那么通过这个能量点呢,我们就可以 把它跟周围环境给区分开来 如果是你放一个箱子, 放在这个车辆的后座当中呢 因为这个箱子是静止的,那么它在 雷达上面呢反射就非常弱 那么,这个参考设计呢,就是我们的 TI DEP 01001 的参考设计 就是针对这个车辆的 乘员检测所提供的一个参考设计 我们已经把这个所有 参考设计的源代码呢 都放在了我们的网站上面给大家参考。 那么这个车辆的乘员检测呢 现在除了毫米波雷达技术之外呢,还有一些客户呢会考虑用摄像头来做 那么但是呢,需要注意的一点呢, 就是说摄像头因为 在车辆在车内采集这个 识别信号的时候呢,会涉及到 个人的隐私问题,那么有很多的 客户车主可能非常不舒服说你这个摄像头 一直对着这个车辆在照。 那么同时呢摄像头呢 在一些特定的场景, 比如说在黑暗的车库当中 或者是在光线非常强的地方呢, 这个摄像头的检测呢 可能会失效。而毫米波雷达呢, 是我们现在所有传感器当中呢 受周围环境的影响最小的一个技术 它可以克服摄像头的这些 环境因素影响的这些问题 那么我们可以看到这个车内的 乘员检测呢现在已经越来越流行 那么特别是在欧洲,那么已经被 写入了一个新的NKF2005 这样的一个安全认证,也就是说, 以后在2025 年的时候 那么这个所有的车上都 需要装这个车内乘员检测的这样 一个系统 第二个参考设计呢,就是我们的 这个驾驶员的叫Vital Sign 也就是心跳和 呼吸检测的这样的一个系统 那我们可以了解到,现在呢 在路面上的交通事故当中 大概有30 %是因为 驾驶员突发心脏疾病所导致的 那么毫米波雷达呢有 非常高的探测精度 可以检测到你人的 这个胸口的起伏震动 那么拿到这些起伏 震动数据的之后呢 我们再结合获得的算法就可以去分析出来驾驶员的呼吸频率和心跳的频率 这个毫米波去做 这个系统的优势是 我们是一个非接触式的系统 不需要在你的身上去绑各种 什么探测带啊或者是什么的, 那驾驶员呢感觉不到 那么,我们在车上的安装位置呢 可以安装在这个车子的比如说 前面的仪表盘上面,也可以安装在 车子后面的这个座椅上面 都可以隐藏起来。也就是说让 驾驶员不会影响到驾驶员 正常的开车的这样的一个应用 这个算法设计,我们也已经就 是放在了TI的网站上面 第三个参考设计呢, 就是说手势识别 因为毫米波呢可以非常精确地检测出来你的这个手势的这个运动的位置 还有你这个运动的速度。 那么我们的各种手势呢 比如说向右或者向左,每一种手势呢 都有它自己的这个模型 那么我们在进行研究和训练之后呢, 我们把各种手势的这个模型呢 存储在我们的这个芯片当中 当用户有发生一种手势的时候呢,我们将各种的这个获取运动和位置信息 跟我们已经保存的 这个模型呢去进行比对 匹配上了之后呢, 我就认为是一种手势 那么现在呢,在我们的这个参考设计呢, 我们现在实现了 那个人手的往左挥、往右挥、 上挥、下挥、手指的顺时针旋转 和反时针旋转总共六种手势。 那么这些手势呢, 可以去对车辆的仪表盘, 对车辆的这个娱乐系统 和空调系统呢进行控制 比如说我可以去控制这个车辆的 音乐的这个音量。那同时呢 这个毫米波呢也可以去做 这个开车门的这样的 一个就是kick open 也就是说你脚踢下,然后我的这个 后备箱门就自动打开了 这样的应用场景 第四项呢,就是说我们的 毫米波雷达可以进行车辆的 障碍物检测 这个呢,跟我们刚才讲过的 停车的应用呢非常非常像 那么我们可以检测出来 车辆周边的一些障碍物 因为我们的在车上面呢 现在有越来越多的这些电动门 被安装起来了。那这些 电动门呢,在打开的过程当中 因为它是自己打开的, 没有人来控制 所以说,如果碰撞到周围的 这个车辆或者行人呢 造成非常严重的 这样的一个安全隐患 那么通过把毫米波雷达放在 车上呢,我就可以去检测周围的 一个扇形空间当中的一个目标 检测到有目标出现了之后呢, 就可以及时的把我的电动门停止下来 那么这里会介绍到 我们TI有一块叫 AWR1642 ODS 这样一个开发板 那么前面介绍的这个 我们刚才有一张照片当中给出来 这个开发板呢, 是基于我们的普通天线来做的 那么它的最远探测距离可以做到129m 但是对于这种车子的 障碍物检测这一类的应用当中 可能我的探测距离 并不需要做的那么远 但是呢我需要有一个非常大的 FOV 因为我要尽可能的去观察 更多的车辆周边的 这样一个情况 那么在我们的 这个ODS 开发板上 可以实现±70°也就是总共 140°的 这个水平方向的视角 那么±40°也就是总共 垂直方向80°的视角 那么通过这个ODS 这个板子天线设计呢 我就可以把我们的这个车辆 周围的这样的一个环境呢 能够完整地分析清楚。 那么这个参考设计呢 包括我们的这个硬件设计资料呢, 我们现在已经把它放到了 TI DEP0104这个位置当中, 大家可以下载进行研究。 刚才介绍到的这些呢,就是我们TI 现在在毫米波雷达技术当中呢 现在我们研究的一些应用方向, 以及我们的对应的 这样的一个参考设计 那么大家肯定非常关心 就是说我今天介绍的这些参考设计呢 在哪个地方可以下载到 那么我给大家提供一个链接, 我们有一个叫 TI resource explorer 简称就叫REX这样的一个网站 那么在这个网站上面呢,可以把我 刚才所介绍到的这些所有TI 公开的这个毫米波雷达 这些参考设计呢,包括源代码, 包括它的设计文档, 还有它的这个测试报告 都能够下载到。 那除了这个链接呢之外呢 我们还有一些其他的 非常有帮助的链接 首先就是我们有一个 TI的e-to-e 的论坛 那么e-to-e它的简称呢 就是engineer-to-engineer 就是客户的工程师跟 TI的 工程师呢沟通的一个渠道 那么我们在e-to-e的 论坛当中呢,可以找到很多就是 关于我们有以前的客户 所提的关于TI 的毫米波雷达技术 或者是关于一些雷达理论的这些问题 那么呢 我可以说大家现在所开发过程 当中呢所遇到的大部分问题呢 在e-to-e的论坛上面都已经有答案了 那么,如果你有一些新的问题呢, 我们也可以在e-to-e 论坛上面去提问,跟我们的 产品线的工程师 进行二十四小时的在线的沟通。 下面呢,是我们给出了我们的 一个现在整个产品系列 包括AWR汽车和IWR工业的 这个在我们TI的网站上面 所有的一些下载资料, 那么大家可以看到我们TI 在毫米波雷达技术我们的 这个资料呢,是非常开放的 我们把我们每一个 在我们在网站上面呢 去用我们的这个产品的 这个型号的呢去进行搜索 可以找到每一个产品型号呢 所对应的所有的数据手册啊 EVM板的资料啊, 还有这些软件包 大家用的最多的这个软件包呢, 就是下面的这个叫mmWave的 sdk 这个 sdk开发包当中呢 会包含 我们的芯片的所有的驱动模块 我们这个雷达的波形的 这些发波的控制模块 后端的这个处理的这些信号链, 以及我们集成的一个完整的 一个参考设计,那么客户拿到了 之后呢,可以在上面进行修改 去实现这样一个系统。那么 这个下载链接呢,是在这里头。 我今天呢这个介绍内容呢, 主要就是在这些。 那很感谢大家参加 今天的这样一个 在线的这样的一个论坛。
下面呢,我有一个展示的 视频可以给大家看一下
这一页呢,是给大家看到的 就是我们的前面介绍的
这个多片级联的这样的一个板子
那这个是我们在室外 测试的时候的一个场景
那这个是在一个停车场的环境底下,我们可以看到可以有可以看到
非常多的这样的一个细节。 那这个是有人在雷达前面
进行行走的时候,我们可以看到有可以看到人的大致的这样一个轮廓
可以看到车辆的这样的一个轮廓。 它这个分辨率非常高
这个是单片雷达所无法实现的。
那这个呢,是我们采用 波束赋形的方式,
可以进行一个角度范围的 这样的一个扫描
下面呢,就是这个雷达的 最远探测距离的这样一个测试
我们看到两辆车子呢, 在往前运动的时候呢,
我们的检测信号呢从 250 米 一直到 300 米还可以获得
非常高的这样的一个反射的能量, 也就是说可以被我的雷达检测到
那这个级联的这个就是 刚才讲的这些级联的方案呢
我们TI现在正在 进行一些资料的整理
我们预计会在后面的几个月 当中呢 正式发布在网上
我的最后一部分呢,我会给大家介绍一下我们的毫米波雷达呢
用在车内的各种应用场景
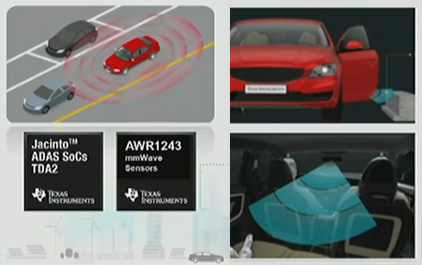
那么前面讲到的这些呢 主要是传统的adas 领域的
也就是车辆的控制这些 领域的这个应用场景
那么除此之外呢,因为毫米波 雷达有非常高的检测精度
那么越来越多的一些 新的车内的应用呢
也被现在被逐渐地发掘出来
那么车内应用第一个, 我给大家介绍一下
就是车内的乘员检测。那么, 我们经常会看到一些报道
像国外和国内,经常会 看到一些报道,就是说
我们有一些家长呢比较粗心, 把小朋友呢落在了这个车辆的后座
然后这样呢,如果家长离开了 之后呢 把车门反锁起来
会带来非常大的风险。 那么毫米波雷达可以呢
进行这个车内的乘员检测, 也就是活体检测
那么,因为人在车辆后座当中呢, 在这个位置的时候呢
因为我们的人呢,总会有一些运动。 我不管你是睡着了
还是没有睡着,都会有些运动, 你会有心跳有呼吸
那么这些运动的信号呢,在毫米波 雷达上面的反射呢非常强烈
我们可以看到左边下面的这个图, 这两个人呢在这个车辆当中呢
我们可以看到有非常强的 这个反射的能量点
那么通过这个能量点呢,我们就可以 把它跟周围环境给区分开来
如果是你放一个箱子, 放在这个车辆的后座当中呢
因为这个箱子是静止的,那么它在 雷达上面呢反射就非常弱
那么,这个参考设计呢,就是我们的 TI DEP 01001 的参考设计
就是针对这个车辆的 乘员检测所提供的一个参考设计
我们已经把这个所有 参考设计的源代码呢
都放在了我们的网站上面给大家参考。 那么这个车辆的乘员检测呢
现在除了毫米波雷达技术之外呢,还有一些客户呢会考虑用摄像头来做
那么但是呢,需要注意的一点呢, 就是说摄像头因为
在车辆在车内采集这个 识别信号的时候呢,会涉及到
个人的隐私问题,那么有很多的 客户车主可能非常不舒服说你这个摄像头
一直对着这个车辆在照。 那么同时呢摄像头呢
在一些特定的场景, 比如说在黑暗的车库当中
或者是在光线非常强的地方呢, 这个摄像头的检测呢
可能会失效。而毫米波雷达呢, 是我们现在所有传感器当中呢
受周围环境的影响最小的一个技术 它可以克服摄像头的这些
环境因素影响的这些问题
那么我们可以看到这个车内的 乘员检测呢现在已经越来越流行
那么特别是在欧洲,那么已经被 写入了一个新的NKF2005
这样的一个安全认证,也就是说, 以后在2025 年的时候
那么这个所有的车上都 需要装这个车内乘员检测的这样
一个系统
第二个参考设计呢,就是我们的 这个驾驶员的叫Vital Sign
也就是心跳和 呼吸检测的这样的一个系统
那我们可以了解到,现在呢 在路面上的交通事故当中
大概有30 %是因为 驾驶员突发心脏疾病所导致的
那么毫米波雷达呢有 非常高的探测精度
可以检测到你人的 这个胸口的起伏震动
那么拿到这些起伏 震动数据的之后呢
我们再结合获得的算法就可以去分析出来驾驶员的呼吸频率和心跳的频率
这个毫米波去做 这个系统的优势是
我们是一个非接触式的系统 不需要在你的身上去绑各种
什么探测带啊或者是什么的, 那驾驶员呢感觉不到
那么,我们在车上的安装位置呢 可以安装在这个车子的比如说
前面的仪表盘上面,也可以安装在 车子后面的这个座椅上面
都可以隐藏起来。也就是说让 驾驶员不会影响到驾驶员
正常的开车的这样的一个应用
这个算法设计,我们也已经就 是放在了TI的网站上面
第三个参考设计呢, 就是说手势识别
因为毫米波呢可以非常精确地检测出来你的这个手势的这个运动的位置
还有你这个运动的速度。 那么我们的各种手势呢
比如说向右或者向左,每一种手势呢 都有它自己的这个模型
那么我们在进行研究和训练之后呢, 我们把各种手势的这个模型呢
存储在我们的这个芯片当中
当用户有发生一种手势的时候呢,我们将各种的这个获取运动和位置信息
跟我们已经保存的 这个模型呢去进行比对
匹配上了之后呢, 我就认为是一种手势
那么现在呢,在我们的这个参考设计呢, 我们现在实现了
那个人手的往左挥、往右挥、 上挥、下挥、手指的顺时针旋转
和反时针旋转总共六种手势。 那么这些手势呢,
可以去对车辆的仪表盘, 对车辆的这个娱乐系统
和空调系统呢进行控制 比如说我可以去控制这个车辆的
音乐的这个音量。那同时呢 这个毫米波呢也可以去做
这个开车门的这样的 一个就是kick open
也就是说你脚踢下,然后我的这个 后备箱门就自动打开了
这样的应用场景
第四项呢,就是说我们的 毫米波雷达可以进行车辆的
障碍物检测
这个呢,跟我们刚才讲过的 停车的应用呢非常非常像
那么我们可以检测出来 车辆周边的一些障碍物
因为我们的在车上面呢 现在有越来越多的这些电动门
被安装起来了。那这些 电动门呢,在打开的过程当中
因为它是自己打开的, 没有人来控制
所以说,如果碰撞到周围的 这个车辆或者行人呢
造成非常严重的 这样的一个安全隐患
那么通过把毫米波雷达放在 车上呢,我就可以去检测周围的
一个扇形空间当中的一个目标
检测到有目标出现了之后呢, 就可以及时的把我的电动门停止下来
那么这里会介绍到 我们TI有一块叫 AWR1642 ODS
这样一个开发板
那么前面介绍的这个 我们刚才有一张照片当中给出来
这个开发板呢, 是基于我们的普通天线来做的
那么它的最远探测距离可以做到129m
但是对于这种车子的 障碍物检测这一类的应用当中
可能我的探测距离 并不需要做的那么远
但是呢我需要有一个非常大的 FOV 因为我要尽可能的去观察
更多的车辆周边的 这样一个情况
那么在我们的 这个ODS 开发板上
可以实现±70°也就是总共 140°的 这个水平方向的视角
那么±40°也就是总共 垂直方向80°的视角
那么通过这个ODS 这个板子天线设计呢
我就可以把我们的这个车辆 周围的这样的一个环境呢
能够完整地分析清楚。 那么这个参考设计呢
包括我们的这个硬件设计资料呢, 我们现在已经把它放到了
TI DEP0104这个位置当中, 大家可以下载进行研究。
刚才介绍到的这些呢,就是我们TI 现在在毫米波雷达技术当中呢
现在我们研究的一些应用方向, 以及我们的对应的
这样的一个参考设计 那么大家肯定非常关心
就是说我今天介绍的这些参考设计呢 在哪个地方可以下载到
那么我给大家提供一个链接, 我们有一个叫 TI resource explorer
简称就叫REX这样的一个网站
那么在这个网站上面呢,可以把我 刚才所介绍到的这些所有TI
公开的这个毫米波雷达 这些参考设计呢,包括源代码,
包括它的设计文档, 还有它的这个测试报告
都能够下载到。 那除了这个链接呢之外呢
我们还有一些其他的 非常有帮助的链接
首先就是我们有一个 TI的e-to-e 的论坛
那么e-to-e它的简称呢 就是engineer-to-engineer
就是客户的工程师跟 TI的 工程师呢沟通的一个渠道
那么我们在e-to-e的 论坛当中呢,可以找到很多就是
关于我们有以前的客户 所提的关于TI 的毫米波雷达技术
或者是关于一些雷达理论的这些问题
那么呢 我可以说大家现在所开发过程 当中呢所遇到的大部分问题呢
在e-to-e的论坛上面都已经有答案了
那么,如果你有一些新的问题呢, 我们也可以在e-to-e
论坛上面去提问,跟我们的 产品线的工程师
进行二十四小时的在线的沟通。
下面呢,是我们给出了我们的 一个现在整个产品系列
包括AWR汽车和IWR工业的 这个在我们TI的网站上面
所有的一些下载资料, 那么大家可以看到我们TI
在毫米波雷达技术我们的 这个资料呢,是非常开放的
我们把我们每一个 在我们在网站上面呢
去用我们的这个产品的 这个型号的呢去进行搜索
可以找到每一个产品型号呢 所对应的所有的数据手册啊
EVM板的资料啊, 还有这些软件包
大家用的最多的这个软件包呢, 就是下面的这个叫mmWave的 sdk
这个 sdk开发包当中呢 会包含 我们的芯片的所有的驱动模块
我们这个雷达的波形的 这些发波的控制模块
后端的这个处理的这些信号链, 以及我们集成的一个完整的
一个参考设计,那么客户拿到了 之后呢,可以在上面进行修改
去实现这样一个系统。那么 这个下载链接呢,是在这里头。
我今天呢这个介绍内容呢, 主要就是在这些。
那很感谢大家参加 今天的这样一个
在线的这样的一个论坛。
下面呢,我有一个展示的 视频可以给大家看一下 这一页呢,是给大家看到的 就是我们的前面介绍的 这个多片级联的这样的一个板子 那这个是我们在室外 测试的时候的一个场景 那这个是在一个停车场的环境底下,我们可以看到可以有可以看到 非常多的这样的一个细节。 那这个是有人在雷达前面 进行行走的时候,我们可以看到有可以看到人的大致的这样一个轮廓 可以看到车辆的这样的一个轮廓。 它这个分辨率非常高 这个是单片雷达所无法实现的。 那这个呢,是我们采用 波束赋形的方式, 可以进行一个角度范围的 这样的一个扫描 下面呢,就是这个雷达的 最远探测距离的这样一个测试 我们看到两辆车子呢, 在往前运动的时候呢, 我们的检测信号呢从 250 米 一直到 300 米还可以获得 非常高的这样的一个反射的能量, 也就是说可以被我的雷达检测到 那这个级联的这个就是 刚才讲的这些级联的方案呢 我们TI现在正在 进行一些资料的整理 我们预计会在后面的几个月 当中呢 正式发布在网上 我的最后一部分呢,我会给大家介绍一下我们的毫米波雷达呢 用在车内的各种应用场景 那么前面讲到的这些呢 主要是传统的adas 领域的 也就是车辆的控制这些 领域的这个应用场景 那么除此之外呢,因为毫米波 雷达有非常高的检测精度 那么越来越多的一些 新的车内的应用呢 也被现在被逐渐地发掘出来 那么车内应用第一个, 我给大家介绍一下 就是车内的乘员检测。那么, 我们经常会看到一些报道 像国外和国内,经常会 看到一些报道,就是说 我们有一些家长呢比较粗心, 把小朋友呢落在了这个车辆的后座 然后这样呢,如果家长离开了 之后呢 把车门反锁起来 会带来非常大的风险。 那么毫米波雷达可以呢 进行这个车内的乘员检测, 也就是活体检测 那么,因为人在车辆后座当中呢, 在这个位置的时候呢 因为我们的人呢,总会有一些运动。 我不管你是睡着了 还是没有睡着,都会有些运动, 你会有心跳有呼吸 那么这些运动的信号呢,在毫米波 雷达上面的反射呢非常强烈 我们可以看到左边下面的这个图, 这两个人呢在这个车辆当中呢 我们可以看到有非常强的 这个反射的能量点 那么通过这个能量点呢,我们就可以 把它跟周围环境给区分开来 如果是你放一个箱子, 放在这个车辆的后座当中呢 因为这个箱子是静止的,那么它在 雷达上面呢反射就非常弱 那么,这个参考设计呢,就是我们的 TI DEP 01001 的参考设计 就是针对这个车辆的 乘员检测所提供的一个参考设计 我们已经把这个所有 参考设计的源代码呢 都放在了我们的网站上面给大家参考。 那么这个车辆的乘员检测呢 现在除了毫米波雷达技术之外呢,还有一些客户呢会考虑用摄像头来做 那么但是呢,需要注意的一点呢, 就是说摄像头因为 在车辆在车内采集这个 识别信号的时候呢,会涉及到 个人的隐私问题,那么有很多的 客户车主可能非常不舒服说你这个摄像头 一直对着这个车辆在照。 那么同时呢摄像头呢 在一些特定的场景, 比如说在黑暗的车库当中 或者是在光线非常强的地方呢, 这个摄像头的检测呢 可能会失效。而毫米波雷达呢, 是我们现在所有传感器当中呢 受周围环境的影响最小的一个技术 它可以克服摄像头的这些 环境因素影响的这些问题 那么我们可以看到这个车内的 乘员检测呢现在已经越来越流行 那么特别是在欧洲,那么已经被 写入了一个新的NKF2005 这样的一个安全认证,也就是说, 以后在2025 年的时候 那么这个所有的车上都 需要装这个车内乘员检测的这样 一个系统 第二个参考设计呢,就是我们的 这个驾驶员的叫Vital Sign 也就是心跳和 呼吸检测的这样的一个系统 那我们可以了解到,现在呢 在路面上的交通事故当中 大概有30 %是因为 驾驶员突发心脏疾病所导致的 那么毫米波雷达呢有 非常高的探测精度 可以检测到你人的 这个胸口的起伏震动 那么拿到这些起伏 震动数据的之后呢 我们再结合获得的算法就可以去分析出来驾驶员的呼吸频率和心跳的频率 这个毫米波去做 这个系统的优势是 我们是一个非接触式的系统 不需要在你的身上去绑各种 什么探测带啊或者是什么的, 那驾驶员呢感觉不到 那么,我们在车上的安装位置呢 可以安装在这个车子的比如说 前面的仪表盘上面,也可以安装在 车子后面的这个座椅上面 都可以隐藏起来。也就是说让 驾驶员不会影响到驾驶员 正常的开车的这样的一个应用 这个算法设计,我们也已经就 是放在了TI的网站上面 第三个参考设计呢, 就是说手势识别 因为毫米波呢可以非常精确地检测出来你的这个手势的这个运动的位置 还有你这个运动的速度。 那么我们的各种手势呢 比如说向右或者向左,每一种手势呢 都有它自己的这个模型 那么我们在进行研究和训练之后呢, 我们把各种手势的这个模型呢 存储在我们的这个芯片当中 当用户有发生一种手势的时候呢,我们将各种的这个获取运动和位置信息 跟我们已经保存的 这个模型呢去进行比对 匹配上了之后呢, 我就认为是一种手势 那么现在呢,在我们的这个参考设计呢, 我们现在实现了 那个人手的往左挥、往右挥、 上挥、下挥、手指的顺时针旋转 和反时针旋转总共六种手势。 那么这些手势呢, 可以去对车辆的仪表盘, 对车辆的这个娱乐系统 和空调系统呢进行控制 比如说我可以去控制这个车辆的 音乐的这个音量。那同时呢 这个毫米波呢也可以去做 这个开车门的这样的 一个就是kick open 也就是说你脚踢下,然后我的这个 后备箱门就自动打开了 这样的应用场景 第四项呢,就是说我们的 毫米波雷达可以进行车辆的 障碍物检测 这个呢,跟我们刚才讲过的 停车的应用呢非常非常像 那么我们可以检测出来 车辆周边的一些障碍物 因为我们的在车上面呢 现在有越来越多的这些电动门 被安装起来了。那这些 电动门呢,在打开的过程当中 因为它是自己打开的, 没有人来控制 所以说,如果碰撞到周围的 这个车辆或者行人呢 造成非常严重的 这样的一个安全隐患 那么通过把毫米波雷达放在 车上呢,我就可以去检测周围的 一个扇形空间当中的一个目标 检测到有目标出现了之后呢, 就可以及时的把我的电动门停止下来 那么这里会介绍到 我们TI有一块叫 AWR1642 ODS 这样一个开发板 那么前面介绍的这个 我们刚才有一张照片当中给出来 这个开发板呢, 是基于我们的普通天线来做的 那么它的最远探测距离可以做到129m 但是对于这种车子的 障碍物检测这一类的应用当中 可能我的探测距离 并不需要做的那么远 但是呢我需要有一个非常大的 FOV 因为我要尽可能的去观察 更多的车辆周边的 这样一个情况 那么在我们的 这个ODS 开发板上 可以实现±70°也就是总共 140°的 这个水平方向的视角 那么±40°也就是总共 垂直方向80°的视角 那么通过这个ODS 这个板子天线设计呢 我就可以把我们的这个车辆 周围的这样的一个环境呢 能够完整地分析清楚。 那么这个参考设计呢 包括我们的这个硬件设计资料呢, 我们现在已经把它放到了 TI DEP0104这个位置当中, 大家可以下载进行研究。 刚才介绍到的这些呢,就是我们TI 现在在毫米波雷达技术当中呢 现在我们研究的一些应用方向, 以及我们的对应的 这样的一个参考设计 那么大家肯定非常关心 就是说我今天介绍的这些参考设计呢 在哪个地方可以下载到 那么我给大家提供一个链接, 我们有一个叫 TI resource explorer 简称就叫REX这样的一个网站 那么在这个网站上面呢,可以把我 刚才所介绍到的这些所有TI 公开的这个毫米波雷达 这些参考设计呢,包括源代码, 包括它的设计文档, 还有它的这个测试报告 都能够下载到。 那除了这个链接呢之外呢 我们还有一些其他的 非常有帮助的链接 首先就是我们有一个 TI的e-to-e 的论坛 那么e-to-e它的简称呢 就是engineer-to-engineer 就是客户的工程师跟 TI的 工程师呢沟通的一个渠道 那么我们在e-to-e的 论坛当中呢,可以找到很多就是 关于我们有以前的客户 所提的关于TI 的毫米波雷达技术 或者是关于一些雷达理论的这些问题 那么呢 我可以说大家现在所开发过程 当中呢所遇到的大部分问题呢 在e-to-e的论坛上面都已经有答案了 那么,如果你有一些新的问题呢, 我们也可以在e-to-e 论坛上面去提问,跟我们的 产品线的工程师 进行二十四小时的在线的沟通。 下面呢,是我们给出了我们的 一个现在整个产品系列 包括AWR汽车和IWR工业的 这个在我们TI的网站上面 所有的一些下载资料, 那么大家可以看到我们TI 在毫米波雷达技术我们的 这个资料呢,是非常开放的 我们把我们每一个 在我们在网站上面呢 去用我们的这个产品的 这个型号的呢去进行搜索 可以找到每一个产品型号呢 所对应的所有的数据手册啊 EVM板的资料啊, 还有这些软件包 大家用的最多的这个软件包呢, 就是下面的这个叫mmWave的 sdk 这个 sdk开发包当中呢 会包含 我们的芯片的所有的驱动模块 我们这个雷达的波形的 这些发波的控制模块 后端的这个处理的这些信号链, 以及我们集成的一个完整的 一个参考设计,那么客户拿到了 之后呢,可以在上面进行修改 去实现这样一个系统。那么 这个下载链接呢,是在这里头。 我今天呢这个介绍内容呢, 主要就是在这些。 那很感谢大家参加 今天的这样一个 在线的这样的一个论坛。
下面呢,我有一个展示的 视频可以给大家看一下
这一页呢,是给大家看到的 就是我们的前面介绍的
这个多片级联的这样的一个板子
那这个是我们在室外 测试的时候的一个场景
那这个是在一个停车场的环境底下,我们可以看到可以有可以看到
非常多的这样的一个细节。 那这个是有人在雷达前面
进行行走的时候,我们可以看到有可以看到人的大致的这样一个轮廓
可以看到车辆的这样的一个轮廓。 它这个分辨率非常高
这个是单片雷达所无法实现的。
那这个呢,是我们采用 波束赋形的方式,
可以进行一个角度范围的 这样的一个扫描
下面呢,就是这个雷达的 最远探测距离的这样一个测试
我们看到两辆车子呢, 在往前运动的时候呢,
我们的检测信号呢从 250 米 一直到 300 米还可以获得
非常高的这样的一个反射的能量, 也就是说可以被我的雷达检测到
那这个级联的这个就是 刚才讲的这些级联的方案呢
我们TI现在正在 进行一些资料的整理
我们预计会在后面的几个月 当中呢 正式发布在网上
我的最后一部分呢,我会给大家介绍一下我们的毫米波雷达呢
用在车内的各种应用场景
那么前面讲到的这些呢 主要是传统的adas 领域的
也就是车辆的控制这些 领域的这个应用场景
那么除此之外呢,因为毫米波 雷达有非常高的检测精度
那么越来越多的一些 新的车内的应用呢
也被现在被逐渐地发掘出来
那么车内应用第一个, 我给大家介绍一下
就是车内的乘员检测。那么, 我们经常会看到一些报道
像国外和国内,经常会 看到一些报道,就是说
我们有一些家长呢比较粗心, 把小朋友呢落在了这个车辆的后座
然后这样呢,如果家长离开了 之后呢 把车门反锁起来
会带来非常大的风险。 那么毫米波雷达可以呢
进行这个车内的乘员检测, 也就是活体检测
那么,因为人在车辆后座当中呢, 在这个位置的时候呢
因为我们的人呢,总会有一些运动。 我不管你是睡着了
还是没有睡着,都会有些运动, 你会有心跳有呼吸
那么这些运动的信号呢,在毫米波 雷达上面的反射呢非常强烈
我们可以看到左边下面的这个图, 这两个人呢在这个车辆当中呢
我们可以看到有非常强的 这个反射的能量点
那么通过这个能量点呢,我们就可以 把它跟周围环境给区分开来
如果是你放一个箱子, 放在这个车辆的后座当中呢
因为这个箱子是静止的,那么它在 雷达上面呢反射就非常弱
那么,这个参考设计呢,就是我们的 TI DEP 01001 的参考设计
就是针对这个车辆的 乘员检测所提供的一个参考设计
我们已经把这个所有 参考设计的源代码呢
都放在了我们的网站上面给大家参考。 那么这个车辆的乘员检测呢
现在除了毫米波雷达技术之外呢,还有一些客户呢会考虑用摄像头来做
那么但是呢,需要注意的一点呢, 就是说摄像头因为
在车辆在车内采集这个 识别信号的时候呢,会涉及到
个人的隐私问题,那么有很多的 客户车主可能非常不舒服说你这个摄像头
一直对着这个车辆在照。 那么同时呢摄像头呢
在一些特定的场景, 比如说在黑暗的车库当中
或者是在光线非常强的地方呢, 这个摄像头的检测呢
可能会失效。而毫米波雷达呢, 是我们现在所有传感器当中呢
受周围环境的影响最小的一个技术 它可以克服摄像头的这些
环境因素影响的这些问题
那么我们可以看到这个车内的 乘员检测呢现在已经越来越流行
那么特别是在欧洲,那么已经被 写入了一个新的NKF2005
这样的一个安全认证,也就是说, 以后在2025 年的时候
那么这个所有的车上都 需要装这个车内乘员检测的这样
一个系统
第二个参考设计呢,就是我们的 这个驾驶员的叫Vital Sign
也就是心跳和 呼吸检测的这样的一个系统
那我们可以了解到,现在呢 在路面上的交通事故当中
大概有30 %是因为 驾驶员突发心脏疾病所导致的
那么毫米波雷达呢有 非常高的探测精度
可以检测到你人的 这个胸口的起伏震动
那么拿到这些起伏 震动数据的之后呢
我们再结合获得的算法就可以去分析出来驾驶员的呼吸频率和心跳的频率
这个毫米波去做 这个系统的优势是
我们是一个非接触式的系统 不需要在你的身上去绑各种
什么探测带啊或者是什么的, 那驾驶员呢感觉不到
那么,我们在车上的安装位置呢 可以安装在这个车子的比如说
前面的仪表盘上面,也可以安装在 车子后面的这个座椅上面
都可以隐藏起来。也就是说让 驾驶员不会影响到驾驶员
正常的开车的这样的一个应用
这个算法设计,我们也已经就 是放在了TI的网站上面
第三个参考设计呢, 就是说手势识别
因为毫米波呢可以非常精确地检测出来你的这个手势的这个运动的位置
还有你这个运动的速度。 那么我们的各种手势呢
比如说向右或者向左,每一种手势呢 都有它自己的这个模型
那么我们在进行研究和训练之后呢, 我们把各种手势的这个模型呢
存储在我们的这个芯片当中
当用户有发生一种手势的时候呢,我们将各种的这个获取运动和位置信息
跟我们已经保存的 这个模型呢去进行比对
匹配上了之后呢, 我就认为是一种手势
那么现在呢,在我们的这个参考设计呢, 我们现在实现了
那个人手的往左挥、往右挥、 上挥、下挥、手指的顺时针旋转
和反时针旋转总共六种手势。 那么这些手势呢,
可以去对车辆的仪表盘, 对车辆的这个娱乐系统
和空调系统呢进行控制 比如说我可以去控制这个车辆的
音乐的这个音量。那同时呢 这个毫米波呢也可以去做
这个开车门的这样的 一个就是kick open
也就是说你脚踢下,然后我的这个 后备箱门就自动打开了
这样的应用场景
第四项呢,就是说我们的 毫米波雷达可以进行车辆的
障碍物检测
这个呢,跟我们刚才讲过的 停车的应用呢非常非常像
那么我们可以检测出来 车辆周边的一些障碍物
因为我们的在车上面呢 现在有越来越多的这些电动门
被安装起来了。那这些 电动门呢,在打开的过程当中
因为它是自己打开的, 没有人来控制
所以说,如果碰撞到周围的 这个车辆或者行人呢
造成非常严重的 这样的一个安全隐患
那么通过把毫米波雷达放在 车上呢,我就可以去检测周围的
一个扇形空间当中的一个目标
检测到有目标出现了之后呢, 就可以及时的把我的电动门停止下来
那么这里会介绍到 我们TI有一块叫 AWR1642 ODS
这样一个开发板
那么前面介绍的这个 我们刚才有一张照片当中给出来
这个开发板呢, 是基于我们的普通天线来做的
那么它的最远探测距离可以做到129m
但是对于这种车子的 障碍物检测这一类的应用当中
可能我的探测距离 并不需要做的那么远
但是呢我需要有一个非常大的 FOV 因为我要尽可能的去观察
更多的车辆周边的 这样一个情况
那么在我们的 这个ODS 开发板上
可以实现±70°也就是总共 140°的 这个水平方向的视角
那么±40°也就是总共 垂直方向80°的视角
那么通过这个ODS 这个板子天线设计呢
我就可以把我们的这个车辆 周围的这样的一个环境呢
能够完整地分析清楚。 那么这个参考设计呢
包括我们的这个硬件设计资料呢, 我们现在已经把它放到了
TI DEP0104这个位置当中, 大家可以下载进行研究。
刚才介绍到的这些呢,就是我们TI 现在在毫米波雷达技术当中呢
现在我们研究的一些应用方向, 以及我们的对应的
这样的一个参考设计 那么大家肯定非常关心
就是说我今天介绍的这些参考设计呢 在哪个地方可以下载到
那么我给大家提供一个链接, 我们有一个叫 TI resource explorer
简称就叫REX这样的一个网站
那么在这个网站上面呢,可以把我 刚才所介绍到的这些所有TI
公开的这个毫米波雷达 这些参考设计呢,包括源代码,
包括它的设计文档, 还有它的这个测试报告
都能够下载到。 那除了这个链接呢之外呢
我们还有一些其他的 非常有帮助的链接
首先就是我们有一个 TI的e-to-e 的论坛
那么e-to-e它的简称呢 就是engineer-to-engineer
就是客户的工程师跟 TI的 工程师呢沟通的一个渠道
那么我们在e-to-e的 论坛当中呢,可以找到很多就是
关于我们有以前的客户 所提的关于TI 的毫米波雷达技术
或者是关于一些雷达理论的这些问题
那么呢 我可以说大家现在所开发过程 当中呢所遇到的大部分问题呢
在e-to-e的论坛上面都已经有答案了
那么,如果你有一些新的问题呢, 我们也可以在e-to-e
论坛上面去提问,跟我们的 产品线的工程师
进行二十四小时的在线的沟通。
下面呢,是我们给出了我们的 一个现在整个产品系列
包括AWR汽车和IWR工业的 这个在我们TI的网站上面
所有的一些下载资料, 那么大家可以看到我们TI
在毫米波雷达技术我们的 这个资料呢,是非常开放的
我们把我们每一个 在我们在网站上面呢
去用我们的这个产品的 这个型号的呢去进行搜索
可以找到每一个产品型号呢 所对应的所有的数据手册啊
EVM板的资料啊, 还有这些软件包
大家用的最多的这个软件包呢, 就是下面的这个叫mmWave的 sdk
这个 sdk开发包当中呢 会包含 我们的芯片的所有的驱动模块
我们这个雷达的波形的 这些发波的控制模块
后端的这个处理的这些信号链, 以及我们集成的一个完整的
一个参考设计,那么客户拿到了 之后呢,可以在上面进行修改
去实现这样一个系统。那么 这个下载链接呢,是在这里头。
我今天呢这个介绍内容呢, 主要就是在这些。
那很感谢大家参加 今天的这样一个
在线的这样的一个论坛。
手机看
扫码用手机观看
 视频简介
视频简介
1.2使用高性能前端的成像雷达
所属课程:TI 77GHz 毫米波雷达产品介绍和方案展示
发布时间:2019.05.09
视频集数:2
本节视频时长:00:13:13
TI 77GHz 毫米波雷达产品介绍和方案展示。



 未学习 1.1TI MMWave汽车传感器解决方案
未学习 1.1TI MMWave汽车传感器解决方案
 未学习 1.2使用高性能前端的成像雷达
未学习 1.2使用高性能前端的成像雷达


