
隔离式栅极驱动器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
孤立的栅极驱动器挑战和解决方案

您好,欢迎观看最后 一个讨论隔离式
栅极驱动器的 TI 高精度实验室讲座。
在本视频中,我们将总结 栅极驱动器所面临的
常见挑战以及为了 应对这些挑战而设计的
一些特性。
这些挑战是 隔离式和
非隔离式系统 所共有的,
但是我们将会 在合理的情况下
重点介绍其对隔离式 栅极驱动器的影响。
有时,驱动器必须 处于静音状态,
此时输入 不再影响输出,
且输出被限制在低电平。
这可能发生在 电源定序、
微控制器 上电复位
或故障期间。 许多驱动器
都具有使能 或禁用引脚,
该引脚可用于 实现此效果。
一些驱动器使用差动 信号来增加输入
噪声的稳定性, 但是如果不需要差动
输入,也可以 根据输入的极性
将其他输入 用作使能或禁用
引脚。
如果控制电路或输出 驱动电路没有足够的
电压电平, 则欠压锁定
会尝试通过将输出 限制在低电平
来保护系统 免受损害。
非隔离式栅极驱动器 可以与对应任何电平
转换分段的独立 元件共享 UVLO
控制阈值和 低侧驱动器。
对于隔离式驱动器, 控制电路 UVLO
通常为低电压, 旨在检测 3.3 伏或 5 伏的
电源。
根据所驱动的 晶体管的类型以及
系统功率和 电压电平,
输出驱动器 UVLO 的选择
通常分为三类, 逻辑电平 MOSFET
和低电压同步 整流器为 5 伏,
常见功率 MOSFET 为 8 伏,
IGBT 和需要 高驱动电压的
碳化硅晶体管 为 12 伏。
有时,还需要 包括负轨 UVLO。
在有些驱动器中, UVLO 是可编程的。
除此之外,制造商 还提供单核驱动器
以及针对内部设定的 UVLO 电平的订购选项。
跳变 UVLO 通常 可在不到一微秒内
使输出失效, 并在施加电源
数十微秒后解除 控制信号静音。
这样可以避免瞬态 意外地激活系统,
并且如果临界电源 电压开始下降,
则该电压可以 轻松地触发锁定。
一些驱动器可提供 高输出和低输出
分裂结构, 允许通过
独立的栅极驱动电阻器 来进行开启和关闭。
这种选择在 IGBT 系统中很常见,
它们不对称的 开启和关闭延迟
会激励产生不同的 栅极驱动强度。
您也可以通过 使用具有串联
二极管的并联支路 来模拟分裂输出,
虽然这会增加组件 数量和环路面积。
在关断期间, 高 dV/dt 和非线性
变化将共同导致 大量电流流过
栅漏寄生电容 Cgd 和
栅源寄生电容 Cgs,
从而在栅极 节点上形成电压。
由于缓冲电路 或栅极电阻器的
作用,从栅极节点 到驱动器 VSS 的阻抗
有时会很大。
因此 Cgs 上 积累的电荷
可能会导致 米勒感应开启和
电桥击穿。
米勒钳位器是一个 大型低阻抗钳位器,
它通过硬钳位至 VSS 来绕过任何
其他电路,从而在关断 期间帮助消除栅源
电容。
IGBT 容易出现 去饱和或击穿事件。
如果这种情况 持续时间较长,
晶体管和系统就有可能 会被损坏或损毁。
高功率 IGBT 及其驱动的系统
可能会非常昂贵,
因此,我们必须 在造成永久破坏
之前发现 并解决故障。
去饱和检测电路 会检查 IGBT
在打开后的集电极 发射极电压,
如果该电压超过 预定的阈值,
如短路时,系统会 禁用 IGBT 并发出
一个故障信号。
栅极发射极电压 可以快速关闭,
以防止过压损坏, 也可以在毫安级
恒定灌电流情况下慢速关闭, 从而防止由于
高 didt 和引线寄生 电感造成的过压损坏。
去饱和检测和软关断 是现今为高可靠性
隔离式 IGBT 栅极驱动器提供的
标准保护特性。
同样的概念 也可以用于碳化硅
MOSFET 保护。
通过将电容器 与电流源结合使用,
可以在去饱和电路 开始监控之前
编程一个短暂的 延迟,以等待开关节点
瞬态趋稳。
肖特基二极管和 电阻器还可以
避免负瞬态电压 损坏去饱和
检测电路。
为避免对碳化硅 造成损坏所需要
达到的检测速度 通常只有几百纳秒,
而 IGBT 的该项 指标则长达数微秒。
因此,在确定 去饱和电路的
响应速度是否足 以保护 MOSFET 时,
必须特别谨慎。
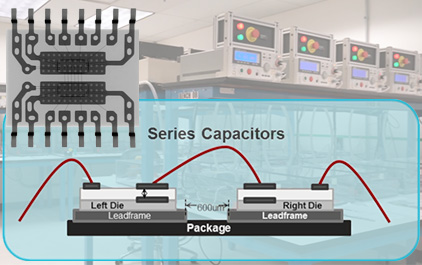
多通道隔离式驱动器 具有针对输出
通道电路之间的 隔离的功能额定值。
该额定值通常受限于 封装形状和引脚
间距。
有时,可以通过 修改封装,
具体来说是去除 封装引脚和引线框
元素,来提高 高电压引脚间的
爬电和间隙距离。
死区时间控制 通常由微控制器
处理,后者 会独立驱动
两个或多个 PWM 通道。
在某些情况下, 驱动器可能会只有一个输入,
但是这个输入 会控制两个互补的输出。
此外,微控制器 死区时间计算
可能会因编程 问题或错误而被破坏,
而且输入可能会因 噪声而发生意外切换。
死区时间电路 可对两个输出都保持
关闭状态的最低强制 持续时间进行编程。
死区时间电路 可防止因两个输出
同时开启而导致击穿, 并可设置一致的
最低死区时间 作为备用,以防
存在噪声或编程错误。
如果不需要死区时间特性, 也可以不使用。
本视频以及 TI 高精度实验室 系列中有关隔离式栅极
驱动器的内容到此全部结束。
谢谢观看。
请尝试完成测验以 检查您对本视频
内容的理解。
-
 未学习 孤立的栅极驱动器挑战和解决方案
未学习 孤立的栅极驱动器挑战和解决方案

