DesignDRIVE位置管理器SIN / COS解决方案简介
Loading the player...
将在30s后自动为您播放下一课程
大家好! 我叫 Brian Fortman, 我将为您简要介绍 一项 TI 针对 C2000 MCU 推出的 马达位置 管理 解决方案中采用的技术。 这次,让我们 从顶层角度来看看 我们的 SIN/COS 解决方案。 SIN/COS 位置 感应技术 向您的位置控制器 提供模拟信号反馈。 正如我们的其他位置 管理器技术, 提供 SIN/COS 支持 (集成在 C2000 MCU 上) 降低了系统成本并 改善了系统性能, 无需使用中间电路 连接控制器 从而减少了 反馈延迟, 也减少了芯片数量 ,降低了系统成本。 除了位置管理器的 这些基本优势外, SIN/COS 解决方案 还通过错误检测和 持续校准,在较大的 速度范围内提供 高精度数据和 完整性更强的反馈。 重要的是,该解决方案 专为位置控制 应用而打造,可针对 具体应用进行调试。 您可以 立即使用 C2000 控制套件包 所含的库 开始开发。 SIN/COS 传感器 有时称为 正弦波 位置编码器。 此技术既可 独立运用, 也可整合到 HIPERFACE 等 编码器接口 或专有 反馈接口。 在传统的 正交编码器中, 角度信息是 通过统计 成对正交脉冲的边缘数获得的。 角解析度由每次 机械旋转的脉冲数 来确定。 因此,在 SIN/COS 传感器中, 角度测量的精度 得以提升, 具体方法是利用 自传感器输出的 一对正弦波和余弦波 之间的关系 来计算边的夹角。 SIN/COS 传感器通常提供 高于解角器或 增量编码器的 旋转位置 解析度和 速度上限。 通常,在编码器轴 每次机械旋转期间, 会发出 正弦信号的 数千次 电气旋转。 实际上,插值位置设在脉冲 边缘之间, 目的是获得微角。 使用两项正弦波 输入的反正切值 计算微角。 为使此计算 结果有效, 必须对这两项输入 同时取样。 C2000 MCU 内部 模拟子系统, 如 F2837x 系列, 就非常适合连接至 SIN/COS 传感器。 存在多个可从 同一源触发的 ADC, 使之能够 同时测量 两个 输入通道。 此外,F2837x 和 07x MCU 还包含固有的 反正切指令,该指令属于 三角学数学单元 (TMU) 的一部分, 这意味着 角度计算可在 短短 70 纳秒内完成。 另外需考虑的是 在高电机轴速下 运行的情况。 在本例中,不再需要 精确的角度信息, 且测量算法 只需统计 完整正弦曲线 旋转的数量, 以确定 航向角的 测量。 通常,这是使用一对 模拟比较器完成的, 这对模拟比较器将对比 输入正弦波 与表示 0 交叉点的阈值。 比较器 输出 与每个正弦曲线的 正弦相对应, 且产生的数字信号 与正交编码器产生的信号 类似。 在 F2837x MCU 上,最多有 8 个模拟比较器, 每个比较器都具有自身的 可编程阈值电压。 这些比较器允许 生成正交脉冲, 然后这些正交脉冲 会从内部输出至 片上正交编码器的 外设模块,以测量航向角 和速度。 有关解决方案如何以最佳方式 在高速和低速角度计算 之间切换的 更多信息, 请参阅 SIN/COS 库 用户指南。 这有一份 SIN/COS 位置 编码器传感器 及其连接 位置控制器的 简易框图。 在本例中,采集 和角度计算 位于 C2000 的 F2837x 实时微控制器 的内部。 此外还可以看到, 在 MCU 外部所需的 组件只有 传感器自身的 缓冲器 和电源。 在 IDDK, 也就是 Design Drive开发套件 的屏幕上,您可以 找到这些清晰标识的 电路。 为了进一步支持您的 SIN/COS 电路开发, TI 还在我们的 TI 设计库中 发布了相关的 参考设计。 SIN/COS 接口 和 F2837x 实际上综合使用了这个器件上的 可用资源, 包括两个 ADC 输入、三个比较器、 一个 QEP 以及一些 C28x MHz。 请注意,在本例中, 无需可配置逻辑块, 也就是 CLB。 正如您所见,C2000 片上外设资源 确实使得连接至 SIN/COS 传感器变得相当简便。 我在此强烈建议 查看 SIN/COS 用户指南中关于 “资源要求”的章节, 以了解更多信息。 与所有位置 管理器版本一样, 我们已在 Lika 等主要的 SIN/COS 传感器供应商处 测试我们的解决方案。 我们所见到的解析度 达 2.5 微度 且速度高达 12,000 RPM。 这些项目全部建立在 IDDK Design Drive 开发套件的 基础上, 这些套件现已在 TI 网上商店有售, 并且随附于我们的 标准控制套件软件 版本中。 SIN/COS 解决方案 在 Design Drive 开发套件和 控制套件中免费 提供。 有关位置管理器解决方案的 技术支持, 请使用我们在 e2e.ti.com/c2000 中 提供的标准 C2000 表格。 请记住,借助 C2000 Design Drive 位置 管理器和我们的 SIN/COS 解决方案, TI 希望帮助您将 更多时间用于 打造与众不同的 优秀产品,而将更少时间 用于开发或维护 那些很快将会成为 入场筹码的技术。 使用 Design Drive 最终会 帮助您将 更快上市销售 更具价值的产品。 如需了解 位置管理器、 Design Drive C2000 实时 MCU, 或其他 TI 工业伺服 和驱动控制解决方案的 更多信息,请访问 ti.com/tool/designdrive。 谢谢。
大家好! 我叫 Brian Fortman, 我将为您简要介绍 一项 TI 针对 C2000 MCU 推出的 马达位置 管理 解决方案中采用的技术。 这次,让我们 从顶层角度来看看 我们的 SIN/COS 解决方案。 SIN/COS 位置 感应技术 向您的位置控制器 提供模拟信号反馈。 正如我们的其他位置 管理器技术, 提供 SIN/COS 支持 (集成在 C2000 MCU 上) 降低了系统成本并 改善了系统性能, 无需使用中间电路 连接控制器 从而减少了 反馈延迟, 也减少了芯片数量 ,降低了系统成本。 除了位置管理器的 这些基本优势外, SIN/COS 解决方案 还通过错误检测和 持续校准,在较大的 速度范围内提供 高精度数据和 完整性更强的反馈。 重要的是,该解决方案 专为位置控制 应用而打造,可针对 具体应用进行调试。 您可以 立即使用 C2000 控制套件包 所含的库 开始开发。 SIN/COS 传感器 有时称为 正弦波 位置编码器。 此技术既可 独立运用, 也可整合到 HIPERFACE 等 编码器接口 或专有 反馈接口。 在传统的 正交编码器中, 角度信息是 通过统计 成对正交脉冲的边缘数获得的。 角解析度由每次 机械旋转的脉冲数 来确定。 因此,在 SIN/COS 传感器中, 角度测量的精度 得以提升, 具体方法是利用 自传感器输出的 一对正弦波和余弦波 之间的关系 来计算边的夹角。 SIN/COS 传感器通常提供 高于解角器或 增量编码器的 旋转位置 解析度和 速度上限。 通常,在编码器轴 每次机械旋转期间, 会发出 正弦信号的 数千次 电气旋转。 实际上,插值位置设在脉冲 边缘之间, 目的是获得微角。 使用两项正弦波 输入的反正切值 计算微角。 为使此计算 结果有效, 必须对这两项输入 同时取样。 C2000 MCU 内部 模拟子系统, 如 F2837x 系列, 就非常适合连接至 SIN/COS 传感器。 存在多个可从 同一源触发的 ADC, 使之能够 同时测量 两个 输入通道。 此外,F2837x 和 07x MCU 还包含固有的 反正切指令,该指令属于 三角学数学单元 (TMU) 的一部分, 这意味着 角度计算可在 短短 70 纳秒内完成。 另外需考虑的是 在高电机轴速下 运行的情况。 在本例中,不再需要 精确的角度信息, 且测量算法 只需统计 完整正弦曲线 旋转的数量, 以确定 航向角的 测量。 通常,这是使用一对 模拟比较器完成的, 这对模拟比较器将对比 输入正弦波 与表示 0 交叉点的阈值。 比较器 输出 与每个正弦曲线的 正弦相对应, 且产生的数字信号 与正交编码器产生的信号 类似。 在 F2837x MCU 上,最多有 8 个模拟比较器, 每个比较器都具有自身的 可编程阈值电压。 这些比较器允许 生成正交脉冲, 然后这些正交脉冲 会从内部输出至 片上正交编码器的 外设模块,以测量航向角 和速度。 有关解决方案如何以最佳方式 在高速和低速角度计算 之间切换的 更多信息, 请参阅 SIN/COS 库 用户指南。 这有一份 SIN/COS 位置 编码器传感器 及其连接 位置控制器的 简易框图。 在本例中,采集 和角度计算 位于 C2000 的 F2837x 实时微控制器 的内部。 此外还可以看到, 在 MCU 外部所需的 组件只有 传感器自身的 缓冲器 和电源。 在 IDDK, 也就是 Design Drive开发套件 的屏幕上,您可以 找到这些清晰标识的 电路。 为了进一步支持您的 SIN/COS 电路开发, TI 还在我们的 TI 设计库中 发布了相关的 参考设计。 SIN/COS 接口 和 F2837x 实际上综合使用了这个器件上的 可用资源, 包括两个 ADC 输入、三个比较器、 一个 QEP 以及一些 C28x MHz。 请注意,在本例中, 无需可配置逻辑块, 也就是 CLB。 正如您所见,C2000 片上外设资源 确实使得连接至 SIN/COS 传感器变得相当简便。 我在此强烈建议 查看 SIN/COS 用户指南中关于 “资源要求”的章节, 以了解更多信息。 与所有位置 管理器版本一样, 我们已在 Lika 等主要的 SIN/COS 传感器供应商处 测试我们的解决方案。 我们所见到的解析度 达 2.5 微度 且速度高达 12,000 RPM。 这些项目全部建立在 IDDK Design Drive 开发套件的 基础上, 这些套件现已在 TI 网上商店有售, 并且随附于我们的 标准控制套件软件 版本中。 SIN/COS 解决方案 在 Design Drive 开发套件和 控制套件中免费 提供。 有关位置管理器解决方案的 技术支持, 请使用我们在 e2e.ti.com/c2000 中 提供的标准 C2000 表格。 请记住,借助 C2000 Design Drive 位置 管理器和我们的 SIN/COS 解决方案, TI 希望帮助您将 更多时间用于 打造与众不同的 优秀产品,而将更少时间 用于开发或维护 那些很快将会成为 入场筹码的技术。 使用 Design Drive 最终会 帮助您将 更快上市销售 更具价值的产品。 如需了解 位置管理器、 Design Drive C2000 实时 MCU, 或其他 TI 工业伺服 和驱动控制解决方案的 更多信息,请访问 ti.com/tool/designdrive。 谢谢。
大家好!
我叫 Brian Fortman, 我将为您简要介绍
一项 TI 针对 C2000 MCU 推出的 马达位置
管理 解决方案中采用的技术。
这次,让我们 从顶层角度来看看
我们的 SIN/COS 解决方案。
SIN/COS 位置 感应技术
向您的位置控制器 提供模拟信号反馈。
正如我们的其他位置 管理器技术,
提供 SIN/COS 支持 (集成在 C2000 MCU 上)
降低了系统成本并 改善了系统性能,
无需使用中间电路 连接控制器
从而减少了 反馈延迟,
也减少了芯片数量 ,降低了系统成本。
除了位置管理器的 这些基本优势外,
SIN/COS 解决方案 还通过错误检测和
持续校准,在较大的 速度范围内提供
高精度数据和 完整性更强的反馈。
重要的是,该解决方案 专为位置控制
应用而打造,可针对 具体应用进行调试。
您可以 立即使用
C2000 控制套件包 所含的库
开始开发。
SIN/COS 传感器 有时称为
正弦波 位置编码器。
此技术既可 独立运用,
也可整合到 HIPERFACE 等 编码器接口
或专有 反馈接口。
在传统的 正交编码器中,
角度信息是 通过统计
成对正交脉冲的边缘数获得的。
角解析度由每次 机械旋转的脉冲数
来确定。
因此,在 SIN/COS 传感器中,
角度测量的精度 得以提升,
具体方法是利用 自传感器输出的
一对正弦波和余弦波 之间的关系
来计算边的夹角。
SIN/COS 传感器通常提供 高于解角器或
增量编码器的 旋转位置
解析度和 速度上限。
通常,在编码器轴 每次机械旋转期间,
会发出 正弦信号的
数千次 电气旋转。
实际上,插值位置设在脉冲 边缘之间,
目的是获得微角。
使用两项正弦波 输入的反正切值
计算微角。
为使此计算 结果有效,
必须对这两项输入 同时取样。
C2000 MCU 内部 模拟子系统,
如 F2837x 系列,
就非常适合连接至 SIN/COS 传感器。
存在多个可从 同一源触发的 ADC,
使之能够 同时测量
两个 输入通道。
此外,F2837x 和 07x MCU 还包含固有的
反正切指令,该指令属于 三角学数学单元 (TMU) 的一部分,
这意味着 角度计算可在
短短 70 纳秒内完成。
另外需考虑的是 在高电机轴速下
运行的情况。
在本例中,不再需要 精确的角度信息,
且测量算法 只需统计
完整正弦曲线 旋转的数量,
以确定 航向角的
测量。
通常,这是使用一对 模拟比较器完成的,
这对模拟比较器将对比 输入正弦波
与表示 0 交叉点的阈值。
比较器 输出
与每个正弦曲线的 正弦相对应,
且产生的数字信号 与正交编码器产生的信号
类似。
在 F2837x MCU 上,最多有 8 个模拟比较器,
每个比较器都具有自身的 可编程阈值电压。
这些比较器允许 生成正交脉冲,
然后这些正交脉冲 会从内部输出至
片上正交编码器的 外设模块,以测量航向角
和速度。
有关解决方案如何以最佳方式 在高速和低速角度计算
之间切换的 更多信息,
请参阅 SIN/COS 库 用户指南。
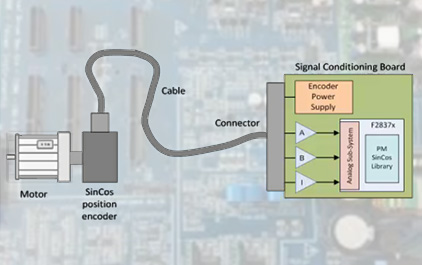
这有一份 SIN/COS 位置 编码器传感器
及其连接 位置控制器的
简易框图。
在本例中,采集 和角度计算
位于 C2000 的 F2837x 实时微控制器
的内部。
此外还可以看到, 在 MCU 外部所需的
组件只有 传感器自身的
缓冲器 和电源。
在 IDDK, 也就是 Design Drive开发套件
的屏幕上,您可以 找到这些清晰标识的
电路。
为了进一步支持您的 SIN/COS 电路开发,
TI 还在我们的 TI 设计库中 发布了相关的
参考设计。
SIN/COS 接口 和 F2837x
实际上综合使用了这个器件上的 可用资源,
包括两个 ADC 输入、三个比较器、
一个 QEP 以及一些 C28x MHz。
请注意,在本例中, 无需可配置逻辑块,
也就是 CLB。
正如您所见,C2000 片上外设资源
确实使得连接至 SIN/COS 传感器变得相当简便。
我在此强烈建议 查看 SIN/COS
用户指南中关于 “资源要求”的章节,
以了解更多信息。
与所有位置 管理器版本一样,
我们已在 Lika 等主要的 SIN/COS 传感器供应商处
测试我们的解决方案。
我们所见到的解析度 达 2.5 微度
且速度高达 12,000 RPM。
这些项目全部建立在 IDDK Design Drive 开发套件的
基础上, 这些套件现已在 TI 网上商店有售,
并且随附于我们的 标准控制套件软件
版本中。
SIN/COS 解决方案 在 Design Drive
开发套件和 控制套件中免费
提供。
有关位置管理器解决方案的 技术支持,
请使用我们在 e2e.ti.com/c2000 中 提供的标准 C2000 表格。
请记住,借助 C2000 Design Drive 位置
管理器和我们的 SIN/COS 解决方案,
TI 希望帮助您将 更多时间用于
打造与众不同的 优秀产品,而将更少时间
用于开发或维护 那些很快将会成为
入场筹码的技术。
使用 Design Drive 最终会
帮助您将 更快上市销售
更具价值的产品。
如需了解 位置管理器、
Design Drive C2000 实时 MCU,
或其他 TI 工业伺服 和驱动控制解决方案的
更多信息,请访问 ti.com/tool/designdrive。
谢谢。
大家好! 我叫 Brian Fortman, 我将为您简要介绍 一项 TI 针对 C2000 MCU 推出的 马达位置 管理 解决方案中采用的技术。 这次,让我们 从顶层角度来看看 我们的 SIN/COS 解决方案。 SIN/COS 位置 感应技术 向您的位置控制器 提供模拟信号反馈。 正如我们的其他位置 管理器技术, 提供 SIN/COS 支持 (集成在 C2000 MCU 上) 降低了系统成本并 改善了系统性能, 无需使用中间电路 连接控制器 从而减少了 反馈延迟, 也减少了芯片数量 ,降低了系统成本。 除了位置管理器的 这些基本优势外, SIN/COS 解决方案 还通过错误检测和 持续校准,在较大的 速度范围内提供 高精度数据和 完整性更强的反馈。 重要的是,该解决方案 专为位置控制 应用而打造,可针对 具体应用进行调试。 您可以 立即使用 C2000 控制套件包 所含的库 开始开发。 SIN/COS 传感器 有时称为 正弦波 位置编码器。 此技术既可 独立运用, 也可整合到 HIPERFACE 等 编码器接口 或专有 反馈接口。 在传统的 正交编码器中, 角度信息是 通过统计 成对正交脉冲的边缘数获得的。 角解析度由每次 机械旋转的脉冲数 来确定。 因此,在 SIN/COS 传感器中, 角度测量的精度 得以提升, 具体方法是利用 自传感器输出的 一对正弦波和余弦波 之间的关系 来计算边的夹角。 SIN/COS 传感器通常提供 高于解角器或 增量编码器的 旋转位置 解析度和 速度上限。 通常,在编码器轴 每次机械旋转期间, 会发出 正弦信号的 数千次 电气旋转。 实际上,插值位置设在脉冲 边缘之间, 目的是获得微角。 使用两项正弦波 输入的反正切值 计算微角。 为使此计算 结果有效, 必须对这两项输入 同时取样。 C2000 MCU 内部 模拟子系统, 如 F2837x 系列, 就非常适合连接至 SIN/COS 传感器。 存在多个可从 同一源触发的 ADC, 使之能够 同时测量 两个 输入通道。 此外,F2837x 和 07x MCU 还包含固有的 反正切指令,该指令属于 三角学数学单元 (TMU) 的一部分, 这意味着 角度计算可在 短短 70 纳秒内完成。 另外需考虑的是 在高电机轴速下 运行的情况。 在本例中,不再需要 精确的角度信息, 且测量算法 只需统计 完整正弦曲线 旋转的数量, 以确定 航向角的 测量。 通常,这是使用一对 模拟比较器完成的, 这对模拟比较器将对比 输入正弦波 与表示 0 交叉点的阈值。 比较器 输出 与每个正弦曲线的 正弦相对应, 且产生的数字信号 与正交编码器产生的信号 类似。 在 F2837x MCU 上,最多有 8 个模拟比较器, 每个比较器都具有自身的 可编程阈值电压。 这些比较器允许 生成正交脉冲, 然后这些正交脉冲 会从内部输出至 片上正交编码器的 外设模块,以测量航向角 和速度。 有关解决方案如何以最佳方式 在高速和低速角度计算 之间切换的 更多信息, 请参阅 SIN/COS 库 用户指南。 这有一份 SIN/COS 位置 编码器传感器 及其连接 位置控制器的 简易框图。 在本例中,采集 和角度计算 位于 C2000 的 F2837x 实时微控制器 的内部。 此外还可以看到, 在 MCU 外部所需的 组件只有 传感器自身的 缓冲器 和电源。 在 IDDK, 也就是 Design Drive开发套件 的屏幕上,您可以 找到这些清晰标识的 电路。 为了进一步支持您的 SIN/COS 电路开发, TI 还在我们的 TI 设计库中 发布了相关的 参考设计。 SIN/COS 接口 和 F2837x 实际上综合使用了这个器件上的 可用资源, 包括两个 ADC 输入、三个比较器、 一个 QEP 以及一些 C28x MHz。 请注意,在本例中, 无需可配置逻辑块, 也就是 CLB。 正如您所见,C2000 片上外设资源 确实使得连接至 SIN/COS 传感器变得相当简便。 我在此强烈建议 查看 SIN/COS 用户指南中关于 “资源要求”的章节, 以了解更多信息。 与所有位置 管理器版本一样, 我们已在 Lika 等主要的 SIN/COS 传感器供应商处 测试我们的解决方案。 我们所见到的解析度 达 2.5 微度 且速度高达 12,000 RPM。 这些项目全部建立在 IDDK Design Drive 开发套件的 基础上, 这些套件现已在 TI 网上商店有售, 并且随附于我们的 标准控制套件软件 版本中。 SIN/COS 解决方案 在 Design Drive 开发套件和 控制套件中免费 提供。 有关位置管理器解决方案的 技术支持, 请使用我们在 e2e.ti.com/c2000 中 提供的标准 C2000 表格。 请记住,借助 C2000 Design Drive 位置 管理器和我们的 SIN/COS 解决方案, TI 希望帮助您将 更多时间用于 打造与众不同的 优秀产品,而将更少时间 用于开发或维护 那些很快将会成为 入场筹码的技术。 使用 Design Drive 最终会 帮助您将 更快上市销售 更具价值的产品。 如需了解 位置管理器、 Design Drive C2000 实时 MCU, 或其他 TI 工业伺服 和驱动控制解决方案的 更多信息,请访问 ti.com/tool/designdrive。 谢谢。
大家好!
我叫 Brian Fortman, 我将为您简要介绍
一项 TI 针对 C2000 MCU 推出的 马达位置
管理 解决方案中采用的技术。
这次,让我们 从顶层角度来看看
我们的 SIN/COS 解决方案。
SIN/COS 位置 感应技术
向您的位置控制器 提供模拟信号反馈。
正如我们的其他位置 管理器技术,
提供 SIN/COS 支持 (集成在 C2000 MCU 上)
降低了系统成本并 改善了系统性能,
无需使用中间电路 连接控制器
从而减少了 反馈延迟,
也减少了芯片数量 ,降低了系统成本。
除了位置管理器的 这些基本优势外,
SIN/COS 解决方案 还通过错误检测和
持续校准,在较大的 速度范围内提供
高精度数据和 完整性更强的反馈。
重要的是,该解决方案 专为位置控制
应用而打造,可针对 具体应用进行调试。
您可以 立即使用
C2000 控制套件包 所含的库
开始开发。
SIN/COS 传感器 有时称为
正弦波 位置编码器。
此技术既可 独立运用,
也可整合到 HIPERFACE 等 编码器接口
或专有 反馈接口。
在传统的 正交编码器中,
角度信息是 通过统计
成对正交脉冲的边缘数获得的。
角解析度由每次 机械旋转的脉冲数
来确定。
因此,在 SIN/COS 传感器中,
角度测量的精度 得以提升,
具体方法是利用 自传感器输出的
一对正弦波和余弦波 之间的关系
来计算边的夹角。
SIN/COS 传感器通常提供 高于解角器或
增量编码器的 旋转位置
解析度和 速度上限。
通常,在编码器轴 每次机械旋转期间,
会发出 正弦信号的
数千次 电气旋转。
实际上,插值位置设在脉冲 边缘之间,
目的是获得微角。
使用两项正弦波 输入的反正切值
计算微角。
为使此计算 结果有效,
必须对这两项输入 同时取样。
C2000 MCU 内部 模拟子系统,
如 F2837x 系列,
就非常适合连接至 SIN/COS 传感器。
存在多个可从 同一源触发的 ADC,
使之能够 同时测量
两个 输入通道。
此外,F2837x 和 07x MCU 还包含固有的
反正切指令,该指令属于 三角学数学单元 (TMU) 的一部分,
这意味着 角度计算可在
短短 70 纳秒内完成。
另外需考虑的是 在高电机轴速下
运行的情况。
在本例中,不再需要 精确的角度信息,
且测量算法 只需统计
完整正弦曲线 旋转的数量,
以确定 航向角的
测量。
通常,这是使用一对 模拟比较器完成的,
这对模拟比较器将对比 输入正弦波
与表示 0 交叉点的阈值。
比较器 输出
与每个正弦曲线的 正弦相对应,
且产生的数字信号 与正交编码器产生的信号
类似。
在 F2837x MCU 上,最多有 8 个模拟比较器,
每个比较器都具有自身的 可编程阈值电压。
这些比较器允许 生成正交脉冲,
然后这些正交脉冲 会从内部输出至
片上正交编码器的 外设模块,以测量航向角
和速度。
有关解决方案如何以最佳方式 在高速和低速角度计算
之间切换的 更多信息,
请参阅 SIN/COS 库 用户指南。
这有一份 SIN/COS 位置 编码器传感器
及其连接 位置控制器的
简易框图。
在本例中,采集 和角度计算
位于 C2000 的 F2837x 实时微控制器
的内部。
此外还可以看到, 在 MCU 外部所需的
组件只有 传感器自身的
缓冲器 和电源。
在 IDDK, 也就是 Design Drive开发套件
的屏幕上,您可以 找到这些清晰标识的
电路。
为了进一步支持您的 SIN/COS 电路开发,
TI 还在我们的 TI 设计库中 发布了相关的
参考设计。
SIN/COS 接口 和 F2837x
实际上综合使用了这个器件上的 可用资源,
包括两个 ADC 输入、三个比较器、
一个 QEP 以及一些 C28x MHz。
请注意,在本例中, 无需可配置逻辑块,
也就是 CLB。
正如您所见,C2000 片上外设资源
确实使得连接至 SIN/COS 传感器变得相当简便。
我在此强烈建议 查看 SIN/COS
用户指南中关于 “资源要求”的章节,
以了解更多信息。
与所有位置 管理器版本一样,
我们已在 Lika 等主要的 SIN/COS 传感器供应商处
测试我们的解决方案。
我们所见到的解析度 达 2.5 微度
且速度高达 12,000 RPM。
这些项目全部建立在 IDDK Design Drive 开发套件的
基础上, 这些套件现已在 TI 网上商店有售,
并且随附于我们的 标准控制套件软件
版本中。
SIN/COS 解决方案 在 Design Drive
开发套件和 控制套件中免费
提供。
有关位置管理器解决方案的 技术支持,
请使用我们在 e2e.ti.com/c2000 中 提供的标准 C2000 表格。
请记住,借助 C2000 Design Drive 位置
管理器和我们的 SIN/COS 解决方案,
TI 希望帮助您将 更多时间用于
打造与众不同的 优秀产品,而将更少时间
用于开发或维护 那些很快将会成为
入场筹码的技术。
使用 Design Drive 最终会
帮助您将 更快上市销售
更具价值的产品。
如需了解 位置管理器、
Design Drive C2000 实时 MCU,
或其他 TI 工业伺服 和驱动控制解决方案的
更多信息,请访问 ti.com/tool/designdrive。
谢谢。
手机看
扫码用手机观看
-
 未学习 DesignDRIVE位置管理器SIN / COS解决方案简介
未学习 DesignDRIVE位置管理器SIN / COS解决方案简介
00:07:10
播放中
 视频简介
视频简介
DesignDRIVE位置管理器SIN / COS解决方案简介
所属课程:DesignDRIVE位置管理器SIN / COS解决方案简介
发布时间:2019.03.11
视频集数:1
本节视频时长:00:07:10
介绍了SIN / COS编码器传感器的DesignDRIVE Position Manager解决方案概述。