
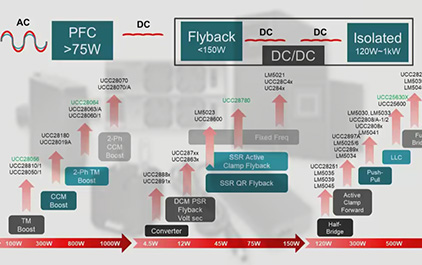
交流/直流和隔离式直流/直流开关稳压器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
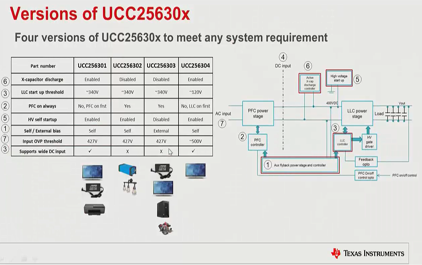
PFC控制器最重要的是什么?



那么大家就是说对 PFC 来说
最关键的可能最关心的是什么呢
那么目前来看最主要就是说
你从应用上来说
你要有比较好的效率
特别是轻载效率
以及比较低的 standby power 待机损耗
那么对 PFC 当然要 PF 要非常好
那么你的 THD 也要很小
那么整个系统呢
这个 BOM cost 的也要很小很低
那么还要使用很方便
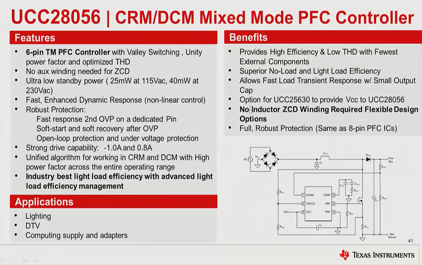
那我们来看 28056
它基本上是可以满足这个
刚才提的这些规范的要求
他是一个 6pin 的 PFC 控制器
他在载比较重的时候
是工作在临界电流连续模式
那么这样的话它效率非常高
它这个体二极管可以用的是
普通的超快恢复的二极管
当他在载较轻的时候
它会进入 DCM 工作状态
那么这样好处就是说
开关频率会把它限制住
在载越轻开关频率越小
那么这样的话
它可以减少它整个系统的损耗
例如电感的这个磁滞损耗
那么还有这个开关损耗
那么所以它在轻载效率就比较好
那么除此以外
它最大的特点就是
它不需要辅助 winding 来实现 ZCD
它可以实现非常低的这个待机损耗
那么还有超快的这个就是输入
Dynamic 动态响应非常好
那么我们先看一下这个
为什么就说他的工作就是说
他可以实现非常好的 PF
因为在 DCM 状态
那么这是传统的这种
Transition Mode PFC 控制器
那么它呢控制就是说
它是通过控制峰时的电流是正弦波
那么由于这个电感电流的峰值
是正弦波的这个波形
那么它电感电流的平均值
平均值也就是输入电流的波形
那么这个平均值按在这边算出来
它就是 1/2 的这个峰值
那么 1/2 的值它从这边
整个就是说峰值是正弦波的话
那么它整个二分之一分的峰值
它实际上是个正弦波的一个波形
所以这个就能自动的实现
这个电感输入电流
是一个正弦波的一个方式
那么这样就可以实现非常好的 THD
那我们再看如果是 DCM 的状态
如果你例如你进入轻载的时候
进入 DCM 状态
那么 DCM 状态中如何去实现这个
这个比较好的这个正弦波
那么最主要是说
你原来 DCM 的时候
你这个输入电感电流的平均值
不再是一个正选波的形状
那么它是按输入电流平均值
是这个一个波形
那你要让它实现是正弦波的话
你必须保证 Ton 时间乘以这个系数
它是一个固定值
也就在整个 cycle 里面
他是个固定值
那我们的设计就是这样
就保证他 Ton 跟这个系数
也就 Ton 乘以这个 DCM 这个时间
它是保证是一个固定值
那么这样就保证它在 DCM 的状态下
它整个这个输入电流的这个
电感电流的平均值也是个正弦波
那么这样就保证了它的 THD
那么我们来看一下 28056
它的好处就是刚才讲就是说
它的效率在轻载效率非常高
那么因为它第一个开关频率降低了
第二个它能够实现这个谷底开通
所以它的整个效率就非常高
我们可以看这个是
它在跟不同的这个
跟我们之前 TI 自己最早的这个产品
以及跟我们竞争对手的产品来比
那么我们 当然满载效率都很接近
大家都在 CRM 状态
所以没什么变化
但是不同的点就是在轻载的效率
我们轻载效率要高
要高于我们的竞争对手
那么这是 28056 在这个
跟这个它的好处的一个简单的显示
就是说他实际上原来这种 8PIN 的
那我们现在变成了 6PIN
那么我们因为把几个 PIN 的功能
复合在一个 PIN 脚上
那么第二个呢我们这个
刚才讲待机损耗非常好
因为它开关频率变低了
然后它也谷点开通
那么第三个好处就是
原来需要这个辅助 winding 来实现 ZVS
我们现在不需要
那么这样也就节省了这个
减少了这个系统的整个
就说你的电感就变得更简单
那么你整个 PIN 脚也变少了
所以 Layout 更方便
那么成本也变得更低
所以这个是 28056 最大的一个优势
-
 未学习 TI的AC-DC产品历史悠久
未学习 TI的AC-DC产品历史悠久
-
 未学习 UCC28780可用的设计工具
未学习 UCC28780可用的设计工具
-
 未学习 PFC控制器最重要的是什么?
未学习 PFC控制器最重要的是什么?
-
 未学习 UCC28056设计工具
未学习 UCC28056设计工具
-
 未学习 UCC28064设计工具
未学习 UCC28064设计工具
-
 未学习 高性能离线AC-DC控制器1
未学习 高性能离线AC-DC控制器1
-
 未学习 高性能离线AC-DC控制器2
未学习 高性能离线AC-DC控制器2
-
 未学习 PFC LLC英雄产品和解决方案
未学习 PFC LLC英雄产品和解决方案








