
人工智能
最新课程
- 利用EIS技术重新定义BMS的可能性
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制
Loading the player...



本实验的目的是将传感器与 执行机构结合,形成一个控制系统。 在本实验的该部分中,您需要 和 本部分的目标是展示如何使用比例控制器 实现沿墙移动。 这是我们的机器人,它具有三个红外距离传感器。 在模块 到墙壁的距离。 所以,在这边有一个,在中间有一个, 在另一边有一个。 目标是沿线路中央移动。 但是,我将会使用比例控制器。 它工作的方式是,使用周期性 中断,它将会测量到墙壁的 距离 误差信号便是这两个 距离之间的差异。 比例控制器将会使这个距离为零, 这意味着我在线路的 正中央。 但是,比例控制器的工作方式是, 取该误差,也就是差异, 然后直接将其添加至 所以,如果我过于偏左,它将会右转。 如果我过于偏右,它则会左转。 比例控制器的速度非常快。 您可以看到,我将 在这个 在它运行过程中,您将会看到原始数据。 您将会看到传感器输出 以及由控制器发现的误差。 好的。 让我们开启它。 让我们来看看发生了什么。 蓝光表示前进。 绿光表示开始。 而周期性中断则会通过左侧和右侧 传感器测量距离。 比例控制器 将会获取该误差,然后快速将其 添加至 直行。 成功了。 在本实验中,您了解到,红外传感器、 一些简单的软件和一个 可以组成一个沿墙壁移动的机器人。 比例控制器响应迅速, 但如果不仔细调节,则可能变得不稳定。 在解决机器人挑战时, 请考虑本课程中出现过的所有 控制算法,包括有限状态机、 增量控制、积分控制和这里的这个, 即比例控制。
本实验的目的是将传感器与
执行机构结合,形成一个控制系统。
在本实验的该部分中,您需要
和
本部分的目标是展示如何使用比例控制器
实现沿墙移动。
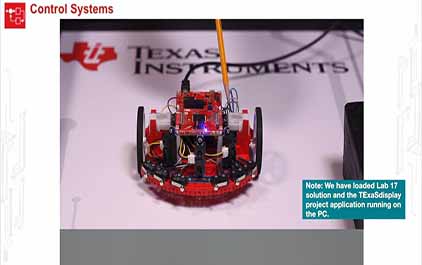
这是我们的机器人,它具有三个红外距离传感器。
在模块
到墙壁的距离。
所以,在这边有一个,在中间有一个,
在另一边有一个。
目标是沿线路中央移动。
但是,我将会使用比例控制器。
它工作的方式是,使用周期性
中断,它将会测量到墙壁的
距离
误差信号便是这两个
距离之间的差异。
比例控制器将会使这个距离为零,
这意味着我在线路的
正中央。
但是,比例控制器的工作方式是,
取该误差,也就是差异,
然后直接将其添加至
所以,如果我过于偏左,它将会右转。
如果我过于偏右,它则会左转。
比例控制器的速度非常快。
您可以看到,我将
在这个
在它运行过程中,您将会看到原始数据。
您将会看到传感器输出
以及由控制器发现的误差。
好的。
让我们开启它。
让我们来看看发生了什么。
蓝光表示前进。
绿光表示开始。
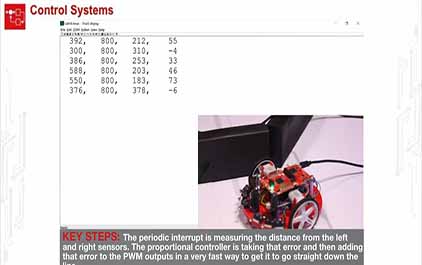
而周期性中断则会通过左侧和右侧
传感器测量距离。
比例控制器
将会获取该误差,然后快速将其
添加至
直行。
成功了。
在本实验中,您了解到,红外传感器、
一些简单的软件和一个
可以组成一个沿墙壁移动的机器人。
比例控制器响应迅速,
但如果不仔细调节,则可能变得不稳定。
在解决机器人挑战时,
请考虑本课程中出现过的所有
控制算法,包括有限状态机、
增量控制、积分控制和这里的这个,
即比例控制。
手机看
收藏本课程
扫码用手机观看
-
 未学习 TI-RSLK 模块 17 - 讲座视频 - 控制系统
未学习 TI-RSLK 模块 17 - 讲座视频 - 控制系统
-
 未学习 TI-RSLK 模块 17 - 实验视频 17.1 - 演示控制系统 - 积分控制
未学习 TI-RSLK 模块 17 - 实验视频 17.1 - 演示控制系统 - 积分控制
-
 未学习 TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制
未学习 TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制


 视频简介
视频简介
TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制
所属课程:TI-RSLK 模块17 - 控制系统
发布时间:2018.08.27
视频集数:3
本节视频时长:00:02:40
你将全面了解输入、控制方程和输出。

