
高速模数转换器 (>10MSPS)
最新课程
- 利用EIS技术重新定义BMS的可能性
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
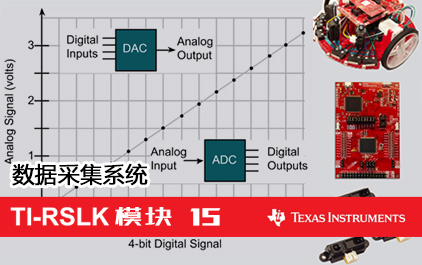
TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量



大家好,我是
在本视频中,我要讨论数据采集系统。
具体要做的是,我们要
对距离进行采样。
我们将采用一个
传感器的传感器
来测量距离。
现在,这是许多嵌入式
很重要的任务。
那就是对相关领域的
尤其是,我们
使用模数
将模拟信号
然后,我们将
如何使用周期性
该距离信号
那么,我们将以
采集这条信息的样本。
这称为采样。
在整个模块中,
采样意味着
限制是什么,
是怎样的。
我们将讨论范围、
在本视频的后半部分,
如何通过
让我们开始吧。
正如我说过的,一个系统可能是
某个特定的目标。
在本课程中,很显然,
系统。
为了解决
我们要将各个方面
以解决该问题。
很显然,我们必须
我要巡线吗,
我要比赛吗,我要
那么,我们将讨论
是什么。
我们需要一个传感器。
现在,我们已经见过两个。
一个是线传感器,
在本章中,
传感器,它称为
它的有趣之处
嗯,它可以测量距离。
但有趣之处在于
这将为我们
问题,我们
从大的方面来看,
一个复杂的系统包含
讨论模拟电路以及
是合适的。
这有些超出
但无需多说,
我将向您展示如何
来消除噪声。
我们将在本章中
如何使用
这是一种将来自外部
计算机中的方法。
在前一个模块中,
转换器。
在下一个模块中,
捕获来测量轮子
频率。
在上一章中,
如何将脉宽
到电机的输出。
那么,我们的这个系统
或输出计算机。
现在,这一切
这一切都通过
在本模块中,
采样和校准。
在下一个视频中,
数字滤波,它将
为我们提供帮助。
在前面的模块中,
检测事件和作出决策。
在本模块
我们将介绍
以及如何使用它
您应该还记得在第
作为输出。
然后,在我们将这一切
我们又分析它的表现。
它沿着赛道行进的
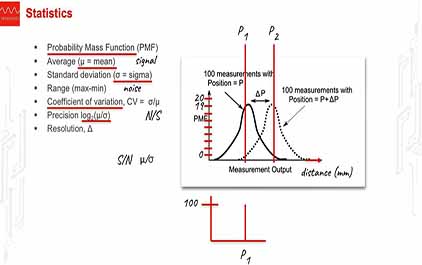
我的信噪比有多大?
那么,我们对评估
产生了兴趣。
这是一个控制系统。
它是一个机器人,
速度、方向、到墙的距离,
那么,我们要获取
它是我们的机器人。
在该特定的
将对作为我们
距离产生兴趣。
但我们将使用
作为传感器。
它将为我提供
然后,我将使用
提供一个数字数。
然后,我将使用
转换为距离。
该特定的
是系统的这个部分。
现在,在后续
要通过电机
调制器将这
从而解决我们的
但在本章中,我们
采集部分,以便
到墙的距离。
那么,让我们来
那么,我们必须
两个实际的
将在时间和
量转换为
它在时间和振幅上
这很显然
那么,如果您使用
存在我可以测量的
距离。
这是采样
限制。
因此,当我
在这里的红色曲线上,
或实际信号。
那么,这是那里的
当我对它进行采样时,
现在,对于
不过,我必须
线之一。
尤其是,当我们
设置它时,最小
最大将是
我们将使用
因此,将存在
但它仍将
那么我们可以
最小值到最大值。
我们可以
它是我可以
我们可以
它是这些我必须
离散值的个数。
当我们实际测量它时,
因为当我运行
我不会得到真正的答案。
我会得到与它
第二件事
那么,如果我以
对它进行采样,
那么我不会获得所有信息。
看看这里
那里出现了
我甚至没有看到它。
那么,我必须
位于这些灰线
我必须选择这些点,
存储在计算机中的
在时间上是离散的,并且
因此,该采样率
它称为奈奎斯特定理。
这意味着,如果我以
那么我可以表示
我还有另外一个限制。
就像振幅一样,
时间和一个
因此,如果我有一个缓冲区,
那么,如果我进行
导致称为频率
即我可以解析的
是多少。
那么,为了确定
我将获取
然后把它除以
这将决定我的
总之,我们
时间上都存在近似。
在振幅方面,它由
决定。
在时间方面,它在这里
采样率进行选择。
利用我们
模块中看到的
我们获取一个数字值,
如果我们尝试生成
或波形。
但在本章中,我们
并把它转换为
这就是模数
我们将使用它
在
换句话说,在
设置成
然后把它转换为介于
该波形上将有
这决定了
转换器的精度。
16,000
实际上可以
24
在本视频中,我们仅会在这里
您将在实验中使用
因为您将在
赛道赛跑时测量
距离、到机器人
到机器人右侧的距离。
我们可以
相关性或
它将采用未知的
并根据该公式
最接近的数字值。
那么,让我们向您展示一些细节。
我们将在该字段中
我们将设置
这个,这里的
这告诉我,我将
这是我的软件
它将在软件上
还有另一个
就像我们曾执行的
选择
转换器进行计时。
这里是我的采样保持。
我要将这
将在采样周期中
让我们看看,
显然,这是开启位。
这是我们将用于
因此我们将对该位
这是使能,
在那里启用它。
那么我们将看到它。
您希望从这张
我还必须做
好的,这是单通道。
单通道是我们要
我们将在实验中
这里还有另外一个,
不,这是下一个。
这里的重点
您应该注意到,我选择了一个时钟。
然后我选择了预分频。
这就是这个
然后我选择了
那么关于
重点是该速度与
那么,如果我更快一些
如果我更快一些,
这种折衷是
那么,如果我要
我将通过延长采样周期
来降低它的速度。
如果您希望了解
相关工作原理的
在
在本视频中,我们
我们将设置
再说一次,
我们将拥有一个地址。
然后在实验中,
因为您将
我们将使用一个
当我们开始运行时,
会在这里完成。
因此,这是我们
进行采样时
还有另一个寄存器。
在这里,我们要将基准
那么,这将设置
然后,我们将在这里
再说一次,我们将
再说一次,除非您
否则您将无法
因此,我鼓励您逐行
在数据表书中查阅
弄清这里的每个位为什么
这样,当您在做实验时,
这些位,以解决您的问题。
在我们将它初始化之后
如果我们希望转换它,
包含四个步骤的过程。
我们将确保
这是全局就绪。
您的实验伙伴可能
而您希望等待以前
发生。
这是可选的。
如果您希望跳过它,
但我把它放在那里,
这是软件启动。
再说一次,那个位,设置
然后,我们将
这是完成标志。
这是我曾在前一张
因此,我们将
然后,将再次在通道
因为我在例程中
现在,我把这一切结合在一起的
因此,我可以使用
以采样率的频率
因此,我将调用我的
执行这四个步骤
等待模数转换器
等待它完成,
这里是我的
现在,在下一个视频中,
但无需多说,那时
现在,您将
正如您知道的,邮箱
一个信号量标志。
这是一个实时性很高的事件。
那么,让我们来向您展示
这是我的
我将看到三次
长暂停,然后是
长暂停,然后
可能会发生
我可能会查看
执行这个
那么,如果我采样的频率
假设我们每
我的采样频率为
看到这个比率,
500
那么,如果您
执行采样
线程的曲线。
我可以做另一件事是,
如果我查看
这个
这还是它。
这是
这段介于
是采样间隔。
还有另外一个
该间隔是
这是一个实时过程。
因此我希望该
那么,如果我像这样,
某个误差小于或
或等于
该误差称为抖动。
实时采样具有
那么我希望该抖动
远小于
我要实现
方法是,我要将这
它就是通过
那么,如果我
这个用于采样的线程
它将具有很低的抖动。
这是该三次
因此我可以在我的
看到抖动。
总之,我们讨论了
其中包含范围、
我们还讨论了它用于
以及这样一个
一个对它进行采样并且
定期中断。
本视频到此结束。
在下一个视频中,
当我把这一切结合
再说一次,这是一件
您需要把它放在
并且不仅要了解它在
原理细节,
在您必须计算的性能
怎样的基本设计决策,
-
 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
-
 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
-
 未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量
未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量



