
LCD 和 OLED 显示电源和驱动器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面
Loading the player...





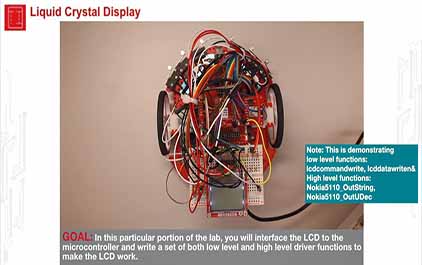
本实验的目的是使用液晶显示器 进行实时调试。 在本实验中,您将需要 和液晶显示器。 在本实验的某些特定部分,您需要 将 并编写一组低电平和高电平驱动程序函数, 从而使 LaunchPad 在硬件方面,您需要 将这八根导线连接到 MSP432 一旦我们将其连接到这里后,器件将会启动。 该 您可以看到这里的图形函数, 我可以在这里绘制图像并将这些图像四处移动。 通过本课程,您主要学习了如何使用 字符、数字和字母输出进行 调试。 让我向您展示一个非常好的东西, 您可以使用液晶显示器来实现它。 调试的目标是能够观察 机器人的内部参数。 这里是实验 道路中央行驶。 但您可以在 行进时到墙壁的实时距离。 因此,能够看到参数是调试的 重要部分。 在本实验中,您了解了同步串行端口、 繁忙权重、I/O 到 调试的本质涉及两个方面,即控制 和可观察性,控制指您的系统 在做什么,可观察性指您的系统在想什么。 机器人上的 但它为您提供了一种用于观察您的 机器人在想什么的简便方法。
本实验的目的是使用液晶显示器
进行实时调试。
在本实验中,您将需要
和液晶显示器。
在本实验的某些特定部分,您需要
将
并编写一组低电平和高电平驱动程序函数,
从而使
LaunchPad
在硬件方面,您需要
将这八根导线连接到
MSP432
一旦我们将其连接到这里后,器件将会启动。
该
您可以看到这里的图形函数,
我可以在这里绘制图像并将这些图像四处移动。
通过本课程,您主要学习了如何使用
字符、数字和字母输出进行
调试。
让我向您展示一个非常好的东西,
您可以使用液晶显示器来实现它。
调试的目标是能够观察
机器人的内部参数。
这里是实验
道路中央行驶。
但您可以在
行进时到墙壁的实时距离。
因此,能够看到参数是调试的
重要部分。
在本实验中,您了解了同步串行端口、
繁忙权重、I/O
到
调试的本质涉及两个方面,即控制
和可观察性,控制指您的系统
在做什么,可观察性指您的系统在想什么。
机器人上的
但它为您提供了一种用于观察您的
机器人在想什么的简便方法。
手机看
收藏本课程
扫码用手机观看
-
 未学习 TI-RSLK 模块 11 - 讲座视频 - 液晶显示屏
未学习 TI-RSLK 模块 11 - 讲座视频 - 液晶显示屏
-
 未学习 TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面
未学习 TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面

 视频简介
视频简介
TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面
所属课程:TI-RSLK 模块 11 - 液晶显示屏
发布时间:2018.08.27
视频集数:2
本节视频时长:00:02:06
回顾软件和硬件忙等待同步以及了解同步串行通信。

