
人工智能
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器
Loading the player...




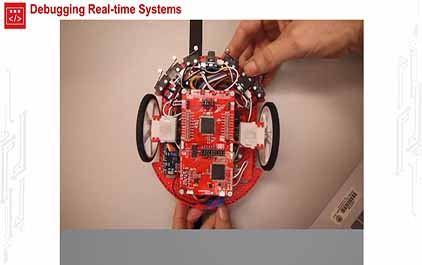
本实验的目的是 并使用中断 在本实验中,您将需要 在本实验的该特定部分, 我们将使用实时存储和调试。 这是机器人。 底部是线传感器。 这里是线传感器。 上面有 我们在上一章中 所以我们现在要做的就是 LaunchPad 为了耗尽电池, 我必须做两件事情。 首先,我必须将输出, 即电机配电和 经由此处连接到 然后我再打开它。 我的 好的。 实验 如果在您单击复位按钮时 它将擦除闪存。 因此当我松开 闪存将被擦除。 现在运转正常, 我还没有完成实验 用手指来移动它。 我现在要做的就是 并将它存储到闪存中。 为了返回到调试模式, 我要按相反的顺序执行这些步骤。 我将断开电池的电源, 并移除配电板的 5V 之后为了进行调试, USB 现在我的程序 我来向您展示一下它在 但您注意到我的手指 因此 现在我要单击 我已经打开了此处的 当我在此窗口中填充 Flash的位置后, 将看到我们 好,就是这。 这些是我们刚刚得到的 如果我向下滚动, 随着我将其左右移动, 在本实验中, 调试转储以及 调试的优先性低, 是实时系统的一个重要部分。 一旦在现场部署您的设备, 将策略信息存储到 就可以继续进行调试。 这样一来,在实际应用中, 并在系统运行的过程中 评估性能。
本实验的目的是
并使用中断
在本实验中,您将需要
在本实验的该特定部分,
我们将使用实时存储和调试。
这是机器人。
底部是线传感器。
这里是线传感器。
上面有
我们在上一章中
所以我们现在要做的就是
LaunchPad
为了耗尽电池,
我必须做两件事情。
首先,我必须将输出,
即电机配电和
经由此处连接到
然后我再打开它。
我的
好的。
实验
如果在您单击复位按钮时
它将擦除闪存。
因此当我松开
闪存将被擦除。
现在运转正常,
我还没有完成实验
用手指来移动它。
我现在要做的就是
并将它存储到闪存中。
为了返回到调试模式,
我要按相反的顺序执行这些步骤。
我将断开电池的电源,
并移除配电板的
5V
之后为了进行调试,
USB
现在我的程序
我来向您展示一下它在
但您注意到我的手指
因此
现在我要单击
我已经打开了此处的
当我在此窗口中填充
Flash的位置后,
将看到我们
好,就是这。
这些是我们刚刚得到的
如果我向下滚动,
随着我将其左右移动,
在本实验中,
调试转储以及
调试的优先性低,
是实时系统的一个重要部分。
一旦在现场部署您的设备,
将策略信息存储到
就可以继续进行调试。
这样一来,在实际应用中,
并在系统运行的过程中
评估性能。
手机看
收藏本课程
扫码用手机观看
-
 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 理论
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 理论
-
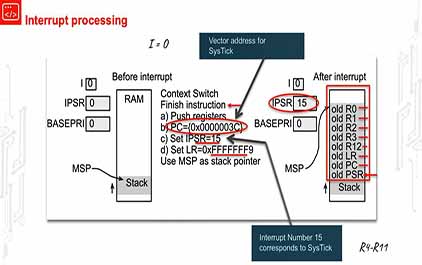 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 中断
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 中断
-
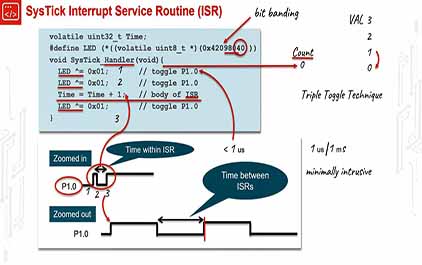 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - SysTick 中断
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - SysTick 中断
-
 未学习 TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器
未学习 TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器



 视频简介
视频简介
TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器
所属课程:TI-RSLK 模块 10 - 调试实时系统
发布时间:2018.08.27
视频集数:4
本节视频时长:00:03:16
该实验的目的是提供实时的调试,同时利用SysTick中断与线传感器相连接。

