
PWM 控制器
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - 理论


大家好,
我是
在本视频中,
脉宽调制,即PWM。
我们将使用该
比如控制电机。
在本次实验中,
我们在前一个视频中
来产生波形。
在实验
LED
数模转换器。
但我们需要记住一点:
系统中使用的非常强大的
让我们开始吧。
在我们开始该
让我们来讨论下响应速度
系统响应速度的有趣方法。
如果我有一个系统,
这里给系统一个输入信号,
我通过给定一个阶跃输入信号,
输入刚开始是一个数字信号,然后它
跃变为另一个数字信号。
系统将对跃变作出响应
可以通过一个时间常数来表述该时间
响应,该时间常数是用达到
因此该系统的时间常数,即达到
最终结果63%所需的时间,是一个
能够衡量该系统
简单参数。
例如,如果我们
那么,这可能是一个电机,对吧?
当我们转到实验
但在这里,在实验
LED,它可以通过
我们更改电压。
什么时候会发光?
它可以在我们的眼睛
现在,事实证明
您知道,时间常数
实际所需的
90
而电机
它非常慢
大约为
100
现在有趣之处在于,
眼睛、我们的视觉皮质
电机的时间概念
100
例如,如果一个
人眼不会看到它闪烁
因此,该特定实验的
将使用我们的
作为电机的
因为它使我们
那么,再说一次,
响应阶跃输入信号
对于电机和我们的大脑,
100
我们将利用脉宽调制的方法
我将
创建一个波形,
快于该时间
我们通过我们的眼睛能够
我们将每
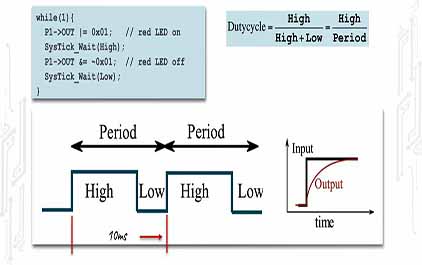
我要通过
以数字方式
高电平,等待这么长的
等待这么长的时间,把它设置为
我设定
周期为固定的。
但高电平的时间是可变的。
这是脉宽调制的
即可变占空比。
占空比定义为,
高电平的
时间与周期的比率。
再说一次,如果
系统的时间
系统现在将
例如,如果它处于
占该时间的
25%,那么从我们的眼睛将看到的
操作来说,将发生的情况是,
那么,我们将看到该
软件现在可以
以调节该亮度。
我要在我的软件中
我要把
我要等待我希望它
把它关闭,等待
时间。
这一切将顺利进行,只要
固定值即可。
再说一次,软件
该波形,因为
或改变它相对于
高电平的时间。
现在,在这里,
我们将浪费所有处理器
要等到我们
在该实验中,我们
使用
但是,眼下无需
我们知道它效率低。
我们稍后会修复它。
眼下,我希望您了解,
可以使用的
用于最终控制
提供的功率量。
我们将通过
系统的时间常数的
使被控对象响应
而不是即时
因此,它不仅
方法,而且还非常简单,
因为它所需的
您应该记得,我们在眼睛
我说过,它类似于电机控制。
现在让我们执行另外一个例子。
事实证明,也可以
这里的电阻器
电机行为的
我在这里
拥有的是一个数字
调制波形。
我将再次选择
那么
10
然后,我将
我们将看到的是,
放置在电路的该点,
可以类比于电机
换句话说,
该波形的
因此,这里的输出
为了使它工作,
使该
十分之一
使它的
慢于我的
如果您知道某些
电路,您就知道这有多么简单。
如果您不知道某些
该
因此,R
我们把
那么,我将选择
再乘以
以模拟方式运行,
我可以对它执行的
奇特的名称
调制数模转换器,因为
它的作用。
这里的数字波形,
位于软件中。
这是一个数字数。
它以线性方式
模拟电压输出
那么它的确是
我希望您在本实验中
即使我们没有
该
并了解软件工作原理
现在,我们要在实验
实际电路
实际电路。
电机将连接在这里,
PWM
然后,当我们
我们将移除所有
内容,并使用
计时器来生成这些波形,
一个用于左侧电机,
一言以蔽之,该
工具,许多嵌入式
那么,在第九章中,我们在最后
然后在本视频中,我们
延迟实现。
我们曾
您将选择
本身的
因此它将仅
电机将会产生一个线性的
介于占空比和平均响应之间的响应
基于能量传输和电机控制,
它为我们提供了
控制能力。
那么,在该特定的
在转到实验
来驱动电机。
因此,请把它放到您的工具箱中。
这是一种非常
称为脉宽调制。
尽情享用吧。
-
 未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - 理论
未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - 理论
-
 未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - PWM
未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - PWM
-
 未学习 TI-RSLK 模块 9 - 实验视频 9.1 - 演示通过调整占空比来运行检测信号
未学习 TI-RSLK 模块 9 - 实验视频 9.1 - 演示通过调整占空比来运行检测信号
-
 未学习 TI-RSLK 模块 9 - 实验视频 9.2 - 演示通过运行正弦波输出来调整功率
未学习 TI-RSLK 模块 9 - 实验视频 9.2 - 演示通过运行正弦波输出来调整功率




