
人工智能
最新课程
- 利用EIS技术重新定义BMS的可能性
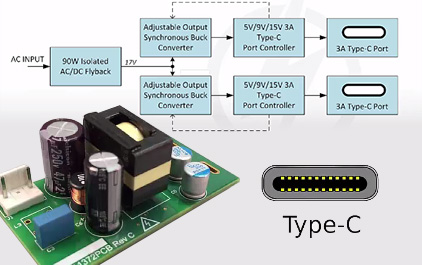
- IsoShield™技术:隔离电源的未来
- CC35XXE - 基于边缘人工智能的唤醒词检测
- AFE7950EVM入门指南(第1部分)
- ADS9324EVM 开箱及教程
- ADS122S14系列传感器测量精密ADC
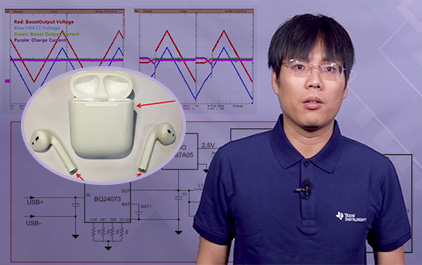
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
热门课程
TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器
Loading the player...

本实验的目的是将 反射传感器与 在本实验中,您将需要 一个卷尺和 在本实验中, 我们将测试线传感器的 高级性能。 我们已经连接了光传感器 并将其焊接到 我们在这里写下的软件 通过执行一段简单的代码获得P7端口的状态值, 该数值告诉我哪一位被置位。 它会打开 然后读取该 所以这个数据引脚,此处的这个数据变量 就是一个 如果您还记得,1 您在本实验中要做的就是 将该数字转换为位置。 我们的目标仍然是测量 相对位置。 这里的单位将是 我们来移动机器人,看它是否工作。 如果我这样移动机器人,这些传感器移到这里, 现在看黑色线条。 您可以看到我这里的数据值 显示黑色线条在机器人的另一侧。 您的目标是测量该距离。 该机器人现在距离这一侧的 现在,如果我将其 回到路径的中间, 如果我将其 我将得到负数。 现在我距离路径 本项目的总体目标是 当您收集到所有数据后, 这是我用来测试结果的 实际值位于左侧, 来自传感器的数据值 位于第二列,距离值 位于第三列。 如果您将其绘制成图形, 能够精确地确定 到线条中间的距离。 您要将机器人 来重复此实验。 您将看到, 向左右两边旋转一定的角度后, 在本实验中, 线传感器是 一种简单而准确的传感器。
本实验的目的是将
反射传感器与
在本实验中,您将需要
一个卷尺和
在本实验中,
我们将测试线传感器的
高级性能。
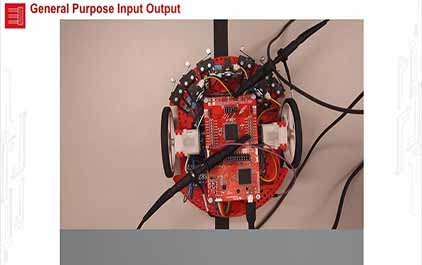
我们已经连接了光传感器
并将其焊接到
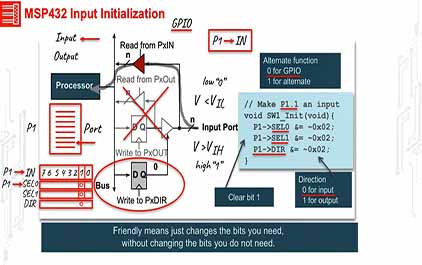
我们在这里写下的软件
通过执行一段简单的代码获得P7端口的状态值,
该数值告诉我哪一位被置位。
它会打开
然后读取该
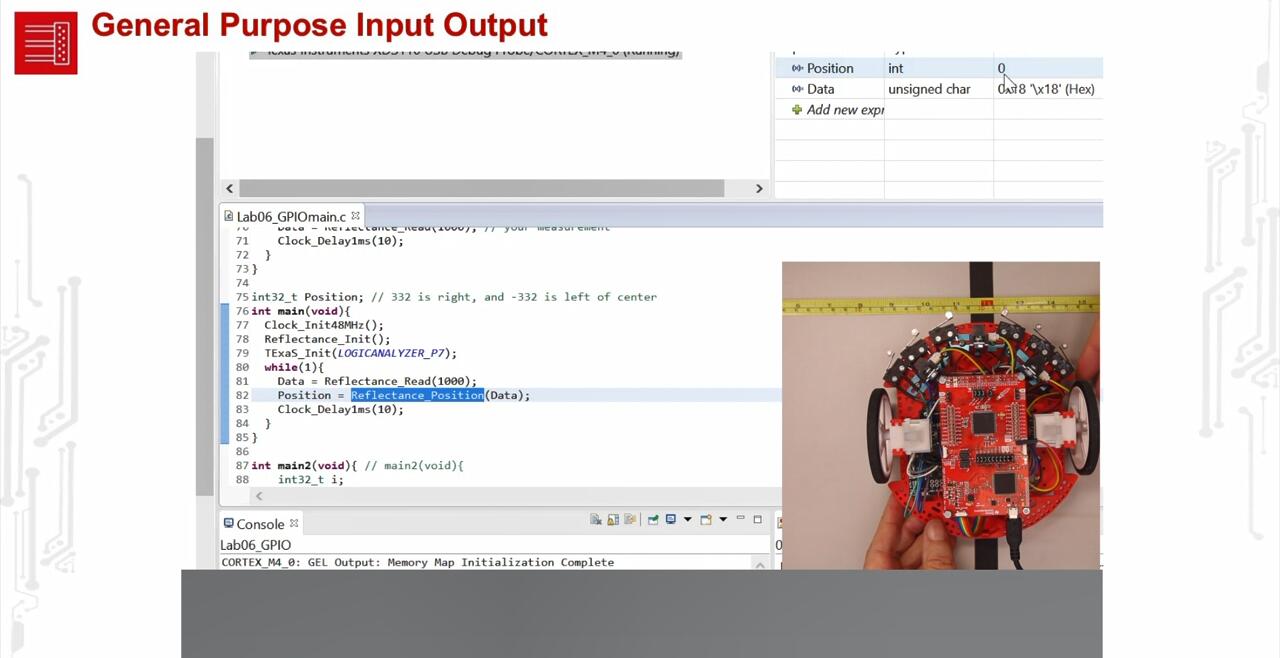
所以这个数据引脚,此处的这个数据变量
就是一个
如果您还记得,1
您在本实验中要做的就是
将该数字转换为位置。
我们的目标仍然是测量
相对位置。
这里的单位将是
我们来移动机器人,看它是否工作。
如果我这样移动机器人,这些传感器移到这里,
现在看黑色线条。
您可以看到我这里的数据值
显示黑色线条在机器人的另一侧。
您的目标是测量该距离。
该机器人现在距离这一侧的
现在,如果我将其
回到路径的中间,
如果我将其
我将得到负数。
现在我距离路径
本项目的总体目标是
当您收集到所有数据后,
这是我用来测试结果的
实际值位于左侧,
来自传感器的数据值
位于第二列,距离值
位于第三列。
如果您将其绘制成图形,
能够精确地确定
到线条中间的距离。
您要将机器人
来重复此实验。
您将看到,
向左右两边旋转一定的角度后,
在本实验中,
线传感器是
一种简单而准确的传感器。
手机看
收藏本课程
扫码用手机观看
-
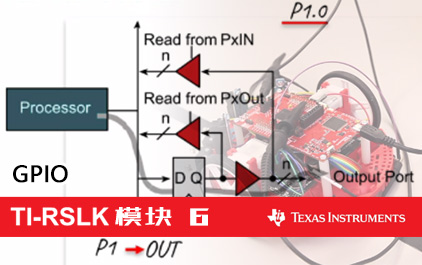
 未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO MSP432
未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO MSP432
-
 未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO 编程
未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO 编程
-
 未学习 TI-RSLK 模块 6 - 实验视频 6.1 - 演示反射传感器的工作原理
未学习 TI-RSLK 模块 6 - 实验视频 6.1 - 演示反射传感器的工作原理
-
 未学习 TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器
未学习 TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器



 视频简介
视频简介
TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器
所属课程:TI-RSLK 模块 6 - GPIO
发布时间:2018.08.27
视频集数:4
本节视频时长:00:02:44
在这个独特的实验部分,我们将会测试线传感器的高水平性能。

