
测试和测量
最新课程
- TPS61290 Boost Converter 介绍
- 数字电源控制器简介
- TI 磁感应仿真器 (TIMSS)
- TI 高精度实验室:使用电机驱动器进行设计
- 人形机器人中的电源供应方案介绍
- TPS6286A06同步直流降压转换器介绍
- C7000编译器:软件流水线反馈(第二部分)
- C7000编译器:软件流水线反馈(第一部分)
- C7000 编译器:可扩展向量
- C7000 编译器:向量比较和谓词
热门课程
TI 感测技术方面的创新产品和设计(五) - 3D人体姿势检测传感



因为我时间
刚才主持人说我已经快超时了
所以最后一个 TOF
其实我想在这个上面花更多时间了
但看上去已经没有更多时间了
所以 TOF 飞行时间
大家有没有 XBox
或者微软的那个 Wii 游戏机
就是打网球
在电视机面前
做各种动作
有没有
就是用这种方式来实现的
它就是 3D 摄像机
3D 飞行时间
帮你来坐做人体的动作识别
那目前 3D 有几种方式来实现
第一种是用两个摄像头
大家这种摄像头太多了
到处都是摄像
这是两维的
那我用两个或三个甚至更多的摄像头
然后通过算法 DSP 处理
它就能实现 3D 的这样一个动作的识别
那这是一个
那它的好处是说对环境光不敏感
因为摄像机
RGB 的显示很清楚
然后精度其实也做得蛮好的
而且效果其实蛮好
但是它也有缺点是
软件的 loading 会很大了
你不知道你到底要用多少大的 DSP
才能完成它
功耗也很大
而且成本也会很高
所以这个不是一个流行的方式
其实这种方式十几年前就有人在研究
但研究到现在
其实不是一个非常好的方式
那还有一种是结构光
像 TI 的 DLP
其实就是一种结构光的显示
我们的 DLP 除了能用来做投影之外
其实还是用来做 3D 扫描的
我见过有个客户做了一个牙模
就是牙床的扫描
就用 3D TOF 在旁边绕一圈一圈转
它就能把你 3D 的这个东西扫描出来
然后再通过 3D 打印打印出来
那它是通过这种结构的发光的方式
它是通过一个传感器
发射固定的一个 pattern 的光过去
然后再反射回来
然后再计算反射回来这些东西
跟我原来 pattern
有相位上幅度上有差值
所以把你整个东西给架构出来
那它的一个好处是说精度非常高
能做到微米级
所以它为什么能用来做 3D 的扫描
以及 3D 的打印
但它有个很致命的缺点
速度太慢了
我们在飞行器上这种避障呢
用在机器人身上这种避障肯定用不了
飞行器你想反应得多快
在空中飞
所以另外一种就是 TOF 技术
就是 time of flight
那原理很简单
就是我也发光
我也是发光给你
然后我再发有调制过的光给你
然后再反射回来
计算我这个飞行时间花了多长
所以这是它一个最简单元
如果我放一个 3D 的摄像头在这里
发一个光过去到那边墙上
很快它就会过来无数个信号
我在芯片里面做计算
然后我就能告诉你们
这面墙上有哪些东西
哪些是凸起来的
哪些是凹进去的
这是它一个简单原理
速度会非常快
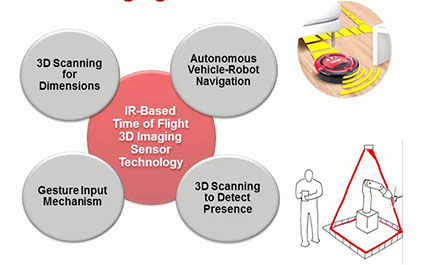
所以它的应用场合现在很多了
第一个就是无人机上面的这种避障
现在无人机如果大家买过
现在主流无人机的玩具玩过的话
它上面都基本上都是用超声波来避障了
它在下面
无人机的高档价钱的好坏
其实很大程度决定它装多少个超声波模块
它的超声波模块主要用来做着陆来用的
就是我飞机我不玩了之后
着陆到地面它有多高
它就一般会这样装一个
那有些在水平方向也会装
装好多个模块在上面
那基本上就是这个还是比较原始的了
所以用这种技术来实现
它就能实现
三维的、在 10 米、5 米范围内的
任何障碍物的分辨
那这是一个
第二个是机器人
扫地机器人也好
或者是工业机器人也好
那么我一个机器人进入到室内
怎么做一个路径识别
对不对
它一看哗一下一扫
我知道你的整个路径在哪里
它就能做出来
另外一个手势识别
就是玩游戏最简单的
手势识别
另外还有一个 3D 扫描的这样一些应用
那目前为止
TI 有两套方案供大家选择去做这个事情
第一个叫 TINTIN
它是两芯片的一个方案
第二个是叫 CALCULUS
是单芯片的一个方案
这两个都是有量产了
3D TOF 部分大家可能在资料上没有
因为我觉得这个蛮有意思的也比较重要
所以就是刚才加进去的
大家有兴趣待会可以向我咨询更多的信息
那这两代芯片
它的一个区别在于
TINTIN 它是两个芯片组成的
一个是传感器
一个是控制器
那它的一个特点是说
它的分辨率是 QVGA 的 320×240
分辨率会比较高一点
那 CALCULUS 是单芯片的一个解决方案
它的主要的卖点是在快、小
它的分辨率稍微小一点,80×60
但它主要是在快
快多少呢
它的帧率能达到 1000FPS
就是 80×60 的这个芯片
能达到 1 秒钟能达到 1000 帧的一个速率
用在运动控制是非常好
那 TINTIN 这一代
它的分辨率
它的帧率会稍微低一点,120FPS
那我相信这个
已经比普通的二维摄像机高很多了
所以目前有这两代芯片供大家选择
手册什么都在网上都已经有了
那相应的评估板也在网上都会有
所以这是 TINTIN 这一代芯片的一个参考设计
传感器加控制器
然后加红光或者激光的发射器
然后再加电源等等组成的这样一个方案
是一个深度地图的一个输出
给到我们的主平台来做计算
做手势识别啊各种动作
那这是 8320
就是 Calculus 单芯片的解决方案
它的相对来说会简单很多
那体积小
因为它擅长是运动控制
所以用在很多无人便携的设备上都会非常合适
所以这是 TINTIN 的一个评估板的样子
大家可以看到
如果你仔细看这个区域
它是有四颗发射的
就是 LED 灯在里面
那这个是传感器接收的
是这样一个评估板
这个已经 release
在官网上你能看到
这张是我们的 CDK
也是评估版上得到一些数据
大家可以看到
我出来的数据其实就是一个景深的数据了
我给你一面墙的数据
这面墙的每一个点的数值的大小
就决定了告诉你了
我上面的这个远和近的一个距离
所以你可以用这个东西干很多事情
你一个很简单的
你用色彩不一样的东西把它描出来
就这样一个图案
如果你用黑白的
黑白灰度不一样的色彩把它描出来
就这样一个图案
这就是一个 3D 图
那另外一个很重要的是说
大家如果留心
我刚才讲的是说我需要个发射
对不对
发射基本上都是用红外的
因为红外人眼看不到
它有个很关键的问题
大家知道现在太阳外面那么强烈
它里面有多少红外的成分
非常多
非常非常多
所以你可以想像我这个东西
用在室内和室外其实不一样
用在室内没有任何红外干扰
它可能会很清楚地展示出来
但一旦我把这个东西放到室外怎么办
它会受到很多干扰
我本身的红外
发出红外光
我需要它接收回来
告诉我距离有多远
但是太阳光不停地在告诉我
很多红外光
我哪知道哪个是真的
哪个是我真正自己发出去的
所以为了解决这个问题
其实这个是一个比较大的问题
其实 TI 在这两代芯片上
都集成了一个引擎在里面
算法的引擎在里面
那它会通过一些光的收发时间的控制等等
自动地把这个东西校准了
这样就减少了我们客户很多
自己在主平台端的一个算法的消耗
这个已经 TI 已经做了
所以你会看到
在光和没有光
开了这个功能之后两个差别
所以我们的芯片其实在户外也是能用的
这是我最想说的一点
几张 PPT
所以总结一下就是说
今天时间也有限
所以给大家只是拣重点
介绍四款那个传感器产品
4404、TOF 还有 LDC
还有那个 PGA900 压力传感器
那如果接下来大家有任何问题的话
都可以跟我们的友商
友商的同事去咨询
也可以直接找到 TI 本土的
我们的技术团队和销售支持来进行咨询
-
 未学习 TI 感测技术方面的创新产品和设计(一) - 传感器概述
未学习 TI 感测技术方面的创新产品和设计(一) - 传感器概述
-
 未学习 TI 感测技术方面的创新产品和设计(二) - 业内最高分辨率的压力传感器
未学习 TI 感测技术方面的创新产品和设计(二) - 业内最高分辨率的压力传感器
-
 未学习 TI 感测技术方面的创新产品和设计(三) - 电感式传感器
未学习 TI 感测技术方面的创新产品和设计(三) - 电感式传感器
-
 未学习 TI 感测技术方面的创新产品和设计(四) - 可穿戴式生物传感器
未学习 TI 感测技术方面的创新产品和设计(四) - 可穿戴式生物传感器
-
 未学习 TI 感测技术方面的创新产品和设计(五) - 3D人体姿势检测传感
未学习 TI 感测技术方面的创新产品和设计(五) - 3D人体姿势检测传感





