4、集成式步进驱动器控制接口
Loading the player...
将在30s后自动为您播放下一课程
[音乐播放] 欢迎观看 TI 高精度实验室 步进驱动器系列第四章。 我叫 James Lockridge。 在本视频中,我将讨论 集成步进驱动器上使用的 常见接口。 集成式步进 驱动器带有 多种控制接口选项。 此幻灯片显示了 三个主要选项: 步进方向、相位使能和 PWM。 步进方向接口 使用 STEP 控制 引脚上的脉冲 上升沿来使电机转动。 当驱动器接收到 STEP 引脚上的上升沿时, 它会使电机移至 下一个整步或微步 位置。 一系列的步进脉冲 将使电机连续旋转。 方向引脚也称 DIR 引脚, 用于选择电机旋转的 方向。 步进方向接口 仅用于驱动 步进电机。 相位使能接口 是一种用于控制 刷式直流和 步进电机的 并行接口。 使能也称 EN 引脚,用于 控制驱动器输出何时 为步进电机通电。 相位也称 PH 引脚, 用于选择电流 流经绕组的方向。 VREF 引脚选择 驱动器 在步进绕组中 所调节的电流电平。 步进绕组中的 电流电平 决定了 转子的位置。 PWM 接口是 另一种用于控制 刷式直流和 步进电机的 并行接口。 电机驱动器输出 取决于输入引脚的状态。 具有 PWM 控制接口的 驱动器也可能 具有用于电流调节的 VREF 引脚。 带有步进方向接口的 集成式步进 驱动器包含 一个分度器表, 该表确定在每个步进绕组中 要调节的电流电平。 分度器表中 每一步进的电流 电平是满量程 电流的百分比。 满量程电流 是步进驱动器 将在电机绕组中 调节的最大电流。 通常,步进驱动器 内部或外部的 基准电压 设置满量程电流。 这是步进驱动器 数据表中的 典型分度器表。 当分度器表 位于索引 1 时, 驱动器将 A 相 绕组中的电流 调节为满量程设置的 0%, 将 B 相绕组中的 电流调节为 100%。 当步进引脚 接收到上升沿时, 分度器将移至 表中的下一个状态。 如果将驱动器 配置为 1/4 微步, 则第二种状态 将是驱动器在 A 相绕组中 将满量程电流调节为 38%, 在 B 相绕组中 将满量程电流调节为 92%。 在 1/8 微步的情况下, 步进引脚上的上升沿 会将 A 相和 B 相电流 分别调节为 20% 和 98%。 对于步进引脚的 每个上升沿, 这将产生的转子 转动为 1/4 微步 模式位移的一半。 根据微步设置, 分度器不一定 必须从索引 1 开始。 分度器表上 显示的红色框 表示通电时 步进驱动器分度器的 起点。 该动画显示了 电机绕组中的 电流如何随 STEP 引脚上的 每个上升沿而变化。 DIR 引脚的状态 决定了电机的 转动方向。 如果 DIR 引脚为 低电平, 则分度器将反向 遍历分度器表。 一些驱动器 具有分度器表, 可以提供低至 1/256 微步的微步模式。 VREF 引脚上的电压 决定了驱动器的 满量程电流。 带有步进方向 接口的驱动器 通过电流斩波 自动调节 电机绕组中的 电流。 通过选择 步进驱动器上的 衰减模式来选择 电流斩波技术的类型。 在此示例中, 微控制器上的 数模转换器 (DAC) 可设置 VREF 引脚上的电压。 为了产生 正正弦波电流, 将面引脚设置为 逻辑高电平。 微控制器可以 使用存储在 查找表中的正弦微步值 来设置 DAC 输出的 VREF 引脚电压。 为了产生 负正弦值, 将相位引脚设置为 逻辑低电平。 由于相位引脚 控制电流的方向, 因此 VREF 引脚可以重复 使用查找表中的相同值。 为了正确驱动 步进电机, AV REF 和 BV REF 引脚的正弦 基准电压 必须为 90 度 异相。 PWM 接口还可以驱动 步进电机,其方式与 相位使能接口类似。 输入引脚配置 电流方向, 而 VREF 引脚设置 电流调节电平。 通过切换输入 引脚的状态, 电流也会 改变方向。 与相位使能 接口一样, BV REF 引脚的 正弦基准电压 也必须与 AV REF 信号 异相 90 度。 通过对 PWM 和 相位使能接口 进行电流调节, 微步分辨率 从根本上 受 DAC 分辨率的限制。 例如,一个 10 位 DAC 可能实现 1,023 个微步级。 电压控制是一种 在不使用电流斩波的情况下 驱动步进电机的方法。 要在相位使能接口上 执行此操作, 需要通过 EN 引脚上 具有正弦占空比的 PWM 信号来控制电机 端子上电压的大小。 要重建整个正弦波, 相位引脚必须 在正弦波的一半位置 切换其状态, 以改变施加到 电机端子的电压的 极性。 此示例仅显示 A 相的输入。 B 相控制类似, 但是输入上的 正弦 PWM 信号 需要与 A 相 异相 90 度。 在 PWM 接口上 实现电压控制时, 固件设计人员 必须注意输入 引脚的状态表。 为了在线圈上 产生正电压, 请将 N1 设置为逻辑高电平 ,将 N2 设置为逻辑低电平。 通常,用于电机驱动的 PWM 在驱动状态和慢速衰减 状态之间切换。 根据此处显示的 表格可以查看出, 对于 PWM 接通时间, N2 引脚需要为逻辑低电平, 对于 PWM 关断时间, N2 引脚需要为逻辑高电平。 这是一个带有 PWM 接口的步进 驱动器的框图。 该动画演示了 如何向输入引脚 提供 PWM 信号, 以在输出端产生 正弦电压的 正半周部分。 为了产生正弦波的 负半周部分, 当 PWM 信号 位于 N1 引脚上时, N2 引脚保持逻辑高电平。 对于电压控制, 相位使能接口 可能比 PWM 接口 更易于使用, 因为它只需要两个 GPIO 和一个微控制器的 PWM 输出外设。 然而,PWM 接口 为输出状态 提供了更多的选项。 系统设计人员 可以通过查看 控件输入状态表 来决定哪个接口最适合 他们的应用。 本幻灯片上的表格 将步进方向接口 与两种类型的并行 接口进行了比较。 通过使用集成在 驱动器中的 分度器表, 步进方向接口 有助于简化来自 微控制器的控制信号的 复杂性。 这使系统设计人员 可以选择 功能较少的 低成本微控制器, 或降低固件的 复杂性。 尽管并行接口 可能需要更多的 微控制器资源 来控制电机, 但它们为微步模式 或电压控制选项 提供了更大的 灵活性。 有时并行接口 可以使用电流调节 来实现较小的 微步模式或 自定义微步级别。 当电源电压 也很低时, 电压控制可用于 低压电机。 有时,一个简单的 双 H 桥驱动器 要比一个集成了电流调节的 驱动器的成本要低。 但是,当电机额定 电压较低 但可用电源 电压较高时, 电流调节和 微步进通常很有用。 在这种情况下, 只要流过电机 绕组的电流 小于电机的额定电流, 电流调节有助于 将电机端子上的 平均电压保持在 电机的额定电压范围内。 使用这些 接口选项中, 系统设计人员 都可以选择合适的接口, 以在系统成本 和复杂性方面 实现最佳性能。 有关步进电机和 TI 集成式步进驱动器的更多信息, 请访问 TI.com 上的 步进驱动器 页面。
[音乐播放] 欢迎观看 TI 高精度实验室 步进驱动器系列第四章。 我叫 James Lockridge。 在本视频中,我将讨论 集成步进驱动器上使用的 常见接口。 集成式步进 驱动器带有 多种控制接口选项。 此幻灯片显示了 三个主要选项: 步进方向、相位使能和 PWM。 步进方向接口 使用 STEP 控制 引脚上的脉冲 上升沿来使电机转动。 当驱动器接收到 STEP 引脚上的上升沿时, 它会使电机移至 下一个整步或微步 位置。 一系列的步进脉冲 将使电机连续旋转。 方向引脚也称 DIR 引脚, 用于选择电机旋转的 方向。 步进方向接口 仅用于驱动 步进电机。 相位使能接口 是一种用于控制 刷式直流和 步进电机的 并行接口。 使能也称 EN 引脚,用于 控制驱动器输出何时 为步进电机通电。 相位也称 PH 引脚, 用于选择电流 流经绕组的方向。 VREF 引脚选择 驱动器 在步进绕组中 所调节的电流电平。 步进绕组中的 电流电平 决定了 转子的位置。 PWM 接口是 另一种用于控制 刷式直流和 步进电机的 并行接口。 电机驱动器输出 取决于输入引脚的状态。 具有 PWM 控制接口的 驱动器也可能 具有用于电流调节的 VREF 引脚。 带有步进方向接口的 集成式步进 驱动器包含 一个分度器表, 该表确定在每个步进绕组中 要调节的电流电平。 分度器表中 每一步进的电流 电平是满量程 电流的百分比。 满量程电流 是步进驱动器 将在电机绕组中 调节的最大电流。 通常,步进驱动器 内部或外部的 基准电压 设置满量程电流。 这是步进驱动器 数据表中的 典型分度器表。 当分度器表 位于索引 1 时, 驱动器将 A 相 绕组中的电流 调节为满量程设置的 0%, 将 B 相绕组中的 电流调节为 100%。 当步进引脚 接收到上升沿时, 分度器将移至 表中的下一个状态。 如果将驱动器 配置为 1/4 微步, 则第二种状态 将是驱动器在 A 相绕组中 将满量程电流调节为 38%, 在 B 相绕组中 将满量程电流调节为 92%。 在 1/8 微步的情况下, 步进引脚上的上升沿 会将 A 相和 B 相电流 分别调节为 20% 和 98%。 对于步进引脚的 每个上升沿, 这将产生的转子 转动为 1/4 微步 模式位移的一半。 根据微步设置, 分度器不一定 必须从索引 1 开始。 分度器表上 显示的红色框 表示通电时 步进驱动器分度器的 起点。 该动画显示了 电机绕组中的 电流如何随 STEP 引脚上的 每个上升沿而变化。 DIR 引脚的状态 决定了电机的 转动方向。 如果 DIR 引脚为 低电平, 则分度器将反向 遍历分度器表。 一些驱动器 具有分度器表, 可以提供低至 1/256 微步的微步模式。 VREF 引脚上的电压 决定了驱动器的 满量程电流。 带有步进方向 接口的驱动器 通过电流斩波 自动调节 电机绕组中的 电流。 通过选择 步进驱动器上的 衰减模式来选择 电流斩波技术的类型。 在此示例中, 微控制器上的 数模转换器 (DAC) 可设置 VREF 引脚上的电压。 为了产生 正正弦波电流, 将面引脚设置为 逻辑高电平。 微控制器可以 使用存储在 查找表中的正弦微步值 来设置 DAC 输出的 VREF 引脚电压。 为了产生 负正弦值, 将相位引脚设置为 逻辑低电平。 由于相位引脚 控制电流的方向, 因此 VREF 引脚可以重复 使用查找表中的相同值。 为了正确驱动 步进电机, AV REF 和 BV REF 引脚的正弦 基准电压 必须为 90 度 异相。 PWM 接口还可以驱动 步进电机,其方式与 相位使能接口类似。 输入引脚配置 电流方向, 而 VREF 引脚设置 电流调节电平。 通过切换输入 引脚的状态, 电流也会 改变方向。 与相位使能 接口一样, BV REF 引脚的 正弦基准电压 也必须与 AV REF 信号 异相 90 度。 通过对 PWM 和 相位使能接口 进行电流调节, 微步分辨率 从根本上 受 DAC 分辨率的限制。 例如,一个 10 位 DAC 可能实现 1,023 个微步级。 电压控制是一种 在不使用电流斩波的情况下 驱动步进电机的方法。 要在相位使能接口上 执行此操作, 需要通过 EN 引脚上 具有正弦占空比的 PWM 信号来控制电机 端子上电压的大小。 要重建整个正弦波, 相位引脚必须 在正弦波的一半位置 切换其状态, 以改变施加到 电机端子的电压的 极性。 此示例仅显示 A 相的输入。 B 相控制类似, 但是输入上的 正弦 PWM 信号 需要与 A 相 异相 90 度。 在 PWM 接口上 实现电压控制时, 固件设计人员 必须注意输入 引脚的状态表。 为了在线圈上 产生正电压, 请将 N1 设置为逻辑高电平 ,将 N2 设置为逻辑低电平。 通常,用于电机驱动的 PWM 在驱动状态和慢速衰减 状态之间切换。 根据此处显示的 表格可以查看出, 对于 PWM 接通时间, N2 引脚需要为逻辑低电平, 对于 PWM 关断时间, N2 引脚需要为逻辑高电平。 这是一个带有 PWM 接口的步进 驱动器的框图。 该动画演示了 如何向输入引脚 提供 PWM 信号, 以在输出端产生 正弦电压的 正半周部分。 为了产生正弦波的 负半周部分, 当 PWM 信号 位于 N1 引脚上时, N2 引脚保持逻辑高电平。 对于电压控制, 相位使能接口 可能比 PWM 接口 更易于使用, 因为它只需要两个 GPIO 和一个微控制器的 PWM 输出外设。 然而,PWM 接口 为输出状态 提供了更多的选项。 系统设计人员 可以通过查看 控件输入状态表 来决定哪个接口最适合 他们的应用。 本幻灯片上的表格 将步进方向接口 与两种类型的并行 接口进行了比较。 通过使用集成在 驱动器中的 分度器表, 步进方向接口 有助于简化来自 微控制器的控制信号的 复杂性。 这使系统设计人员 可以选择 功能较少的 低成本微控制器, 或降低固件的 复杂性。 尽管并行接口 可能需要更多的 微控制器资源 来控制电机, 但它们为微步模式 或电压控制选项 提供了更大的 灵活性。 有时并行接口 可以使用电流调节 来实现较小的 微步模式或 自定义微步级别。 当电源电压 也很低时, 电压控制可用于 低压电机。 有时,一个简单的 双 H 桥驱动器 要比一个集成了电流调节的 驱动器的成本要低。 但是,当电机额定 电压较低 但可用电源 电压较高时, 电流调节和 微步进通常很有用。 在这种情况下, 只要流过电机 绕组的电流 小于电机的额定电流, 电流调节有助于 将电机端子上的 平均电压保持在 电机的额定电压范围内。 使用这些 接口选项中, 系统设计人员 都可以选择合适的接口, 以在系统成本 和复杂性方面 实现最佳性能。 有关步进电机和 TI 集成式步进驱动器的更多信息, 请访问 TI.com 上的 步进驱动器 页面。
[音乐播放]
欢迎观看 TI 高精度实验室
步进驱动器系列第四章。
我叫 James Lockridge。
在本视频中,我将讨论 集成步进驱动器上使用的
常见接口。
集成式步进 驱动器带有
多种控制接口选项。
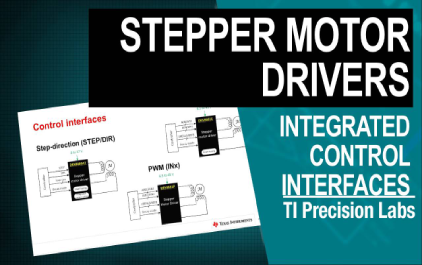
此幻灯片显示了 三个主要选项:
步进方向、相位使能和 PWM。
步进方向接口 使用 STEP 控制
引脚上的脉冲 上升沿来使电机转动。
当驱动器接收到 STEP 引脚上的上升沿时,
它会使电机移至 下一个整步或微步
位置。
一系列的步进脉冲 将使电机连续旋转。
方向引脚也称 DIR 引脚, 用于选择电机旋转的
方向。
步进方向接口 仅用于驱动
步进电机。
相位使能接口 是一种用于控制
刷式直流和 步进电机的
并行接口。
使能也称 EN 引脚,用于 控制驱动器输出何时
为步进电机通电。
相位也称 PH 引脚, 用于选择电流
流经绕组的方向。
VREF 引脚选择 驱动器
在步进绕组中 所调节的电流电平。
步进绕组中的 电流电平
决定了 转子的位置。
PWM 接口是 另一种用于控制
刷式直流和 步进电机的
并行接口。
电机驱动器输出 取决于输入引脚的状态。
具有 PWM 控制接口的 驱动器也可能
具有用于电流调节的 VREF 引脚。
带有步进方向接口的 集成式步进
驱动器包含 一个分度器表,
该表确定在每个步进绕组中 要调节的电流电平。
分度器表中 每一步进的电流
电平是满量程 电流的百分比。
满量程电流 是步进驱动器
将在电机绕组中 调节的最大电流。
通常,步进驱动器 内部或外部的
基准电压
设置满量程电流。
这是步进驱动器 数据表中的
典型分度器表。
当分度器表 位于索引 1 时,
驱动器将 A 相 绕组中的电流
调节为满量程设置的 0%, 将 B 相绕组中的
电流调节为 100%。
当步进引脚 接收到上升沿时,
分度器将移至 表中的下一个状态。
如果将驱动器 配置为 1/4 微步,
则第二种状态 将是驱动器在 A 相绕组中
将满量程电流调节为 38%, 在 B 相绕组中
将满量程电流调节为 92%。
在 1/8 微步的情况下, 步进引脚上的上升沿
会将 A 相和 B 相电流 分别调节为
20% 和 98%。
对于步进引脚的 每个上升沿,
这将产生的转子 转动为 1/4 微步
模式位移的一半。
根据微步设置, 分度器不一定
必须从索引 1 开始。
分度器表上 显示的红色框
表示通电时 步进驱动器分度器的
起点。
该动画显示了 电机绕组中的
电流如何随 STEP 引脚上的 每个上升沿而变化。
DIR 引脚的状态 决定了电机的
转动方向。
如果 DIR 引脚为 低电平,
则分度器将反向 遍历分度器表。
一些驱动器 具有分度器表,
可以提供低至 1/256 微步的微步模式。
VREF 引脚上的电压 决定了驱动器的
满量程电流。
带有步进方向 接口的驱动器
通过电流斩波 自动调节
电机绕组中的 电流。
通过选择 步进驱动器上的
衰减模式来选择 电流斩波技术的类型。
在此示例中, 微控制器上的
数模转换器 (DAC) 可设置 VREF 引脚上的电压。
为了产生 正正弦波电流,
将面引脚设置为 逻辑高电平。
微控制器可以 使用存储在
查找表中的正弦微步值 来设置 DAC 输出的
VREF 引脚电压。
为了产生 负正弦值,
将相位引脚设置为 逻辑低电平。
由于相位引脚 控制电流的方向,
因此 VREF 引脚可以重复 使用查找表中的相同值。
为了正确驱动 步进电机,
AV REF 和 BV REF 引脚的正弦
基准电压 必须为 90 度
异相。
PWM 接口还可以驱动 步进电机,其方式与
相位使能接口类似。
输入引脚配置 电流方向,
而 VREF 引脚设置 电流调节电平。
通过切换输入 引脚的状态,
电流也会 改变方向。
与相位使能 接口一样,
BV REF 引脚的 正弦基准电压
也必须与 AV REF 信号 异相 90 度。
通过对 PWM 和 相位使能接口
进行电流调节, 微步分辨率
从根本上 受 DAC 分辨率的限制。
例如,一个 10 位
DAC 可能实现 1,023 个微步级。
电压控制是一种 在不使用电流斩波的情况下
驱动步进电机的方法。
要在相位使能接口上 执行此操作,
需要通过 EN 引脚上 具有正弦占空比的
PWM 信号来控制电机 端子上电压的大小。
要重建整个正弦波, 相位引脚必须
在正弦波的一半位置 切换其状态,
以改变施加到 电机端子的电压的
极性。
此示例仅显示 A 相的输入。
B 相控制类似, 但是输入上的
正弦 PWM 信号 需要与 A 相
异相 90 度。
在 PWM 接口上 实现电压控制时,
固件设计人员 必须注意输入
引脚的状态表。
为了在线圈上 产生正电压,
请将 N1 设置为逻辑高电平 ,将 N2 设置为逻辑低电平。
通常,用于电机驱动的 PWM 在驱动状态和慢速衰减
状态之间切换。
根据此处显示的 表格可以查看出,
对于 PWM 接通时间, N2 引脚需要为逻辑低电平,
对于 PWM 关断时间, N2 引脚需要为逻辑高电平。
这是一个带有 PWM 接口的步进
驱动器的框图。
该动画演示了 如何向输入引脚
提供 PWM 信号, 以在输出端产生
正弦电压的 正半周部分。
为了产生正弦波的 负半周部分,
当 PWM 信号 位于 N1 引脚上时,
N2 引脚保持逻辑高电平。
对于电压控制, 相位使能接口
可能比 PWM 接口 更易于使用,
因为它只需要两个 GPIO 和一个微控制器的
PWM 输出外设。
然而,PWM 接口 为输出状态
提供了更多的选项。
系统设计人员 可以通过查看
控件输入状态表 来决定哪个接口最适合
他们的应用。
本幻灯片上的表格 将步进方向接口
与两种类型的并行 接口进行了比较。
通过使用集成在 驱动器中的
分度器表, 步进方向接口
有助于简化来自 微控制器的控制信号的
复杂性。
这使系统设计人员 可以选择
功能较少的 低成本微控制器,
或降低固件的 复杂性。
尽管并行接口 可能需要更多的
微控制器资源 来控制电机,
但它们为微步模式 或电压控制选项
提供了更大的 灵活性。
有时并行接口 可以使用电流调节
来实现较小的 微步模式或
自定义微步级别。
当电源电压 也很低时,
电压控制可用于 低压电机。
有时,一个简单的 双 H 桥驱动器
要比一个集成了电流调节的 驱动器的成本要低。
但是,当电机额定 电压较低
但可用电源 电压较高时,
电流调节和 微步进通常很有用。
在这种情况下, 只要流过电机
绕组的电流 小于电机的额定电流,
电流调节有助于 将电机端子上的
平均电压保持在 电机的额定电压范围内。
使用这些 接口选项中,
系统设计人员 都可以选择合适的接口,
以在系统成本 和复杂性方面
实现最佳性能。
有关步进电机和 TI 集成式步进驱动器的更多信息,
请访问 TI.com 上的 步进驱动器
页面。
[音乐播放] 欢迎观看 TI 高精度实验室 步进驱动器系列第四章。 我叫 James Lockridge。 在本视频中,我将讨论 集成步进驱动器上使用的 常见接口。 集成式步进 驱动器带有 多种控制接口选项。 此幻灯片显示了 三个主要选项: 步进方向、相位使能和 PWM。 步进方向接口 使用 STEP 控制 引脚上的脉冲 上升沿来使电机转动。 当驱动器接收到 STEP 引脚上的上升沿时, 它会使电机移至 下一个整步或微步 位置。 一系列的步进脉冲 将使电机连续旋转。 方向引脚也称 DIR 引脚, 用于选择电机旋转的 方向。 步进方向接口 仅用于驱动 步进电机。 相位使能接口 是一种用于控制 刷式直流和 步进电机的 并行接口。 使能也称 EN 引脚,用于 控制驱动器输出何时 为步进电机通电。 相位也称 PH 引脚, 用于选择电流 流经绕组的方向。 VREF 引脚选择 驱动器 在步进绕组中 所调节的电流电平。 步进绕组中的 电流电平 决定了 转子的位置。 PWM 接口是 另一种用于控制 刷式直流和 步进电机的 并行接口。 电机驱动器输出 取决于输入引脚的状态。 具有 PWM 控制接口的 驱动器也可能 具有用于电流调节的 VREF 引脚。 带有步进方向接口的 集成式步进 驱动器包含 一个分度器表, 该表确定在每个步进绕组中 要调节的电流电平。 分度器表中 每一步进的电流 电平是满量程 电流的百分比。 满量程电流 是步进驱动器 将在电机绕组中 调节的最大电流。 通常,步进驱动器 内部或外部的 基准电压 设置满量程电流。 这是步进驱动器 数据表中的 典型分度器表。 当分度器表 位于索引 1 时, 驱动器将 A 相 绕组中的电流 调节为满量程设置的 0%, 将 B 相绕组中的 电流调节为 100%。 当步进引脚 接收到上升沿时, 分度器将移至 表中的下一个状态。 如果将驱动器 配置为 1/4 微步, 则第二种状态 将是驱动器在 A 相绕组中 将满量程电流调节为 38%, 在 B 相绕组中 将满量程电流调节为 92%。 在 1/8 微步的情况下, 步进引脚上的上升沿 会将 A 相和 B 相电流 分别调节为 20% 和 98%。 对于步进引脚的 每个上升沿, 这将产生的转子 转动为 1/4 微步 模式位移的一半。 根据微步设置, 分度器不一定 必须从索引 1 开始。 分度器表上 显示的红色框 表示通电时 步进驱动器分度器的 起点。 该动画显示了 电机绕组中的 电流如何随 STEP 引脚上的 每个上升沿而变化。 DIR 引脚的状态 决定了电机的 转动方向。 如果 DIR 引脚为 低电平, 则分度器将反向 遍历分度器表。 一些驱动器 具有分度器表, 可以提供低至 1/256 微步的微步模式。 VREF 引脚上的电压 决定了驱动器的 满量程电流。 带有步进方向 接口的驱动器 通过电流斩波 自动调节 电机绕组中的 电流。 通过选择 步进驱动器上的 衰减模式来选择 电流斩波技术的类型。 在此示例中, 微控制器上的 数模转换器 (DAC) 可设置 VREF 引脚上的电压。 为了产生 正正弦波电流, 将面引脚设置为 逻辑高电平。 微控制器可以 使用存储在 查找表中的正弦微步值 来设置 DAC 输出的 VREF 引脚电压。 为了产生 负正弦值, 将相位引脚设置为 逻辑低电平。 由于相位引脚 控制电流的方向, 因此 VREF 引脚可以重复 使用查找表中的相同值。 为了正确驱动 步进电机, AV REF 和 BV REF 引脚的正弦 基准电压 必须为 90 度 异相。 PWM 接口还可以驱动 步进电机,其方式与 相位使能接口类似。 输入引脚配置 电流方向, 而 VREF 引脚设置 电流调节电平。 通过切换输入 引脚的状态, 电流也会 改变方向。 与相位使能 接口一样, BV REF 引脚的 正弦基准电压 也必须与 AV REF 信号 异相 90 度。 通过对 PWM 和 相位使能接口 进行电流调节, 微步分辨率 从根本上 受 DAC 分辨率的限制。 例如,一个 10 位 DAC 可能实现 1,023 个微步级。 电压控制是一种 在不使用电流斩波的情况下 驱动步进电机的方法。 要在相位使能接口上 执行此操作, 需要通过 EN 引脚上 具有正弦占空比的 PWM 信号来控制电机 端子上电压的大小。 要重建整个正弦波, 相位引脚必须 在正弦波的一半位置 切换其状态, 以改变施加到 电机端子的电压的 极性。 此示例仅显示 A 相的输入。 B 相控制类似, 但是输入上的 正弦 PWM 信号 需要与 A 相 异相 90 度。 在 PWM 接口上 实现电压控制时, 固件设计人员 必须注意输入 引脚的状态表。 为了在线圈上 产生正电压, 请将 N1 设置为逻辑高电平 ,将 N2 设置为逻辑低电平。 通常,用于电机驱动的 PWM 在驱动状态和慢速衰减 状态之间切换。 根据此处显示的 表格可以查看出, 对于 PWM 接通时间, N2 引脚需要为逻辑低电平, 对于 PWM 关断时间, N2 引脚需要为逻辑高电平。 这是一个带有 PWM 接口的步进 驱动器的框图。 该动画演示了 如何向输入引脚 提供 PWM 信号, 以在输出端产生 正弦电压的 正半周部分。 为了产生正弦波的 负半周部分, 当 PWM 信号 位于 N1 引脚上时, N2 引脚保持逻辑高电平。 对于电压控制, 相位使能接口 可能比 PWM 接口 更易于使用, 因为它只需要两个 GPIO 和一个微控制器的 PWM 输出外设。 然而,PWM 接口 为输出状态 提供了更多的选项。 系统设计人员 可以通过查看 控件输入状态表 来决定哪个接口最适合 他们的应用。 本幻灯片上的表格 将步进方向接口 与两种类型的并行 接口进行了比较。 通过使用集成在 驱动器中的 分度器表, 步进方向接口 有助于简化来自 微控制器的控制信号的 复杂性。 这使系统设计人员 可以选择 功能较少的 低成本微控制器, 或降低固件的 复杂性。 尽管并行接口 可能需要更多的 微控制器资源 来控制电机, 但它们为微步模式 或电压控制选项 提供了更大的 灵活性。 有时并行接口 可以使用电流调节 来实现较小的 微步模式或 自定义微步级别。 当电源电压 也很低时, 电压控制可用于 低压电机。 有时,一个简单的 双 H 桥驱动器 要比一个集成了电流调节的 驱动器的成本要低。 但是,当电机额定 电压较低 但可用电源 电压较高时, 电流调节和 微步进通常很有用。 在这种情况下, 只要流过电机 绕组的电流 小于电机的额定电流, 电流调节有助于 将电机端子上的 平均电压保持在 电机的额定电压范围内。 使用这些 接口选项中, 系统设计人员 都可以选择合适的接口, 以在系统成本 和复杂性方面 实现最佳性能。 有关步进电机和 TI 集成式步进驱动器的更多信息, 请访问 TI.com 上的 步进驱动器 页面。
[音乐播放]
欢迎观看 TI 高精度实验室
步进驱动器系列第四章。
我叫 James Lockridge。
在本视频中,我将讨论 集成步进驱动器上使用的
常见接口。
集成式步进 驱动器带有
多种控制接口选项。
此幻灯片显示了 三个主要选项:
步进方向、相位使能和 PWM。
步进方向接口 使用 STEP 控制
引脚上的脉冲 上升沿来使电机转动。
当驱动器接收到 STEP 引脚上的上升沿时,
它会使电机移至 下一个整步或微步
位置。
一系列的步进脉冲 将使电机连续旋转。
方向引脚也称 DIR 引脚, 用于选择电机旋转的
方向。
步进方向接口 仅用于驱动
步进电机。
相位使能接口 是一种用于控制
刷式直流和 步进电机的
并行接口。
使能也称 EN 引脚,用于 控制驱动器输出何时
为步进电机通电。
相位也称 PH 引脚, 用于选择电流
流经绕组的方向。
VREF 引脚选择 驱动器
在步进绕组中 所调节的电流电平。
步进绕组中的 电流电平
决定了 转子的位置。
PWM 接口是 另一种用于控制
刷式直流和 步进电机的
并行接口。
电机驱动器输出 取决于输入引脚的状态。
具有 PWM 控制接口的 驱动器也可能
具有用于电流调节的 VREF 引脚。
带有步进方向接口的 集成式步进
驱动器包含 一个分度器表,
该表确定在每个步进绕组中 要调节的电流电平。
分度器表中 每一步进的电流
电平是满量程 电流的百分比。
满量程电流 是步进驱动器
将在电机绕组中 调节的最大电流。
通常,步进驱动器 内部或外部的
基准电压
设置满量程电流。
这是步进驱动器 数据表中的
典型分度器表。
当分度器表 位于索引 1 时,
驱动器将 A 相 绕组中的电流
调节为满量程设置的 0%, 将 B 相绕组中的
电流调节为 100%。
当步进引脚 接收到上升沿时,
分度器将移至 表中的下一个状态。
如果将驱动器 配置为 1/4 微步,
则第二种状态 将是驱动器在 A 相绕组中
将满量程电流调节为 38%, 在 B 相绕组中
将满量程电流调节为 92%。
在 1/8 微步的情况下, 步进引脚上的上升沿
会将 A 相和 B 相电流 分别调节为
20% 和 98%。
对于步进引脚的 每个上升沿,
这将产生的转子 转动为 1/4 微步
模式位移的一半。
根据微步设置, 分度器不一定
必须从索引 1 开始。
分度器表上 显示的红色框
表示通电时 步进驱动器分度器的
起点。
该动画显示了 电机绕组中的
电流如何随 STEP 引脚上的 每个上升沿而变化。
DIR 引脚的状态 决定了电机的
转动方向。
如果 DIR 引脚为 低电平,
则分度器将反向 遍历分度器表。
一些驱动器 具有分度器表,
可以提供低至 1/256 微步的微步模式。
VREF 引脚上的电压 决定了驱动器的
满量程电流。
带有步进方向 接口的驱动器
通过电流斩波 自动调节
电机绕组中的 电流。
通过选择 步进驱动器上的
衰减模式来选择 电流斩波技术的类型。
在此示例中, 微控制器上的
数模转换器 (DAC) 可设置 VREF 引脚上的电压。
为了产生 正正弦波电流,
将面引脚设置为 逻辑高电平。
微控制器可以 使用存储在
查找表中的正弦微步值 来设置 DAC 输出的
VREF 引脚电压。
为了产生 负正弦值,
将相位引脚设置为 逻辑低电平。
由于相位引脚 控制电流的方向,
因此 VREF 引脚可以重复 使用查找表中的相同值。
为了正确驱动 步进电机,
AV REF 和 BV REF 引脚的正弦
基准电压 必须为 90 度
异相。
PWM 接口还可以驱动 步进电机,其方式与
相位使能接口类似。
输入引脚配置 电流方向,
而 VREF 引脚设置 电流调节电平。
通过切换输入 引脚的状态,
电流也会 改变方向。
与相位使能 接口一样,
BV REF 引脚的 正弦基准电压
也必须与 AV REF 信号 异相 90 度。
通过对 PWM 和 相位使能接口
进行电流调节, 微步分辨率
从根本上 受 DAC 分辨率的限制。
例如,一个 10 位
DAC 可能实现 1,023 个微步级。
电压控制是一种 在不使用电流斩波的情况下
驱动步进电机的方法。
要在相位使能接口上 执行此操作,
需要通过 EN 引脚上 具有正弦占空比的
PWM 信号来控制电机 端子上电压的大小。
要重建整个正弦波, 相位引脚必须
在正弦波的一半位置 切换其状态,
以改变施加到 电机端子的电压的
极性。
此示例仅显示 A 相的输入。
B 相控制类似, 但是输入上的
正弦 PWM 信号 需要与 A 相
异相 90 度。
在 PWM 接口上 实现电压控制时,
固件设计人员 必须注意输入
引脚的状态表。
为了在线圈上 产生正电压,
请将 N1 设置为逻辑高电平 ,将 N2 设置为逻辑低电平。
通常,用于电机驱动的 PWM 在驱动状态和慢速衰减
状态之间切换。
根据此处显示的 表格可以查看出,
对于 PWM 接通时间, N2 引脚需要为逻辑低电平,
对于 PWM 关断时间, N2 引脚需要为逻辑高电平。
这是一个带有 PWM 接口的步进
驱动器的框图。
该动画演示了 如何向输入引脚
提供 PWM 信号, 以在输出端产生
正弦电压的 正半周部分。
为了产生正弦波的 负半周部分,
当 PWM 信号 位于 N1 引脚上时,
N2 引脚保持逻辑高电平。
对于电压控制, 相位使能接口
可能比 PWM 接口 更易于使用,
因为它只需要两个 GPIO 和一个微控制器的
PWM 输出外设。
然而,PWM 接口 为输出状态
提供了更多的选项。
系统设计人员 可以通过查看
控件输入状态表 来决定哪个接口最适合
他们的应用。
本幻灯片上的表格 将步进方向接口
与两种类型的并行 接口进行了比较。
通过使用集成在 驱动器中的
分度器表, 步进方向接口
有助于简化来自 微控制器的控制信号的
复杂性。
这使系统设计人员 可以选择
功能较少的 低成本微控制器,
或降低固件的 复杂性。
尽管并行接口 可能需要更多的
微控制器资源 来控制电机,
但它们为微步模式 或电压控制选项
提供了更大的 灵活性。
有时并行接口 可以使用电流调节
来实现较小的 微步模式或
自定义微步级别。
当电源电压 也很低时,
电压控制可用于 低压电机。
有时,一个简单的 双 H 桥驱动器
要比一个集成了电流调节的 驱动器的成本要低。
但是,当电机额定 电压较低
但可用电源 电压较高时,
电流调节和 微步进通常很有用。
在这种情况下, 只要流过电机
绕组的电流 小于电机的额定电流,
电流调节有助于 将电机端子上的
平均电压保持在 电机的额定电压范围内。
使用这些 接口选项中,
系统设计人员 都可以选择合适的接口,
以在系统成本 和复杂性方面
实现最佳性能。
有关步进电机和 TI 集成式步进驱动器的更多信息,
请访问 TI.com 上的 步进驱动器
页面。
手机看
扫码用手机观看
 视频简介
视频简介
4、集成式步进驱动器控制接口
所属课程:TI 高精度实验室 - 电机驱动
发布时间:2020.04.29
视频集数:11
本节视频时长:00:09:57
了解有关电机驱动器类型,构造和设计的更多信息,以减少设计时间并开发更智能,更安全,更小巧的电机驱动器解决方案。



 未学习 1、基本介绍
未学习 1、基本介绍
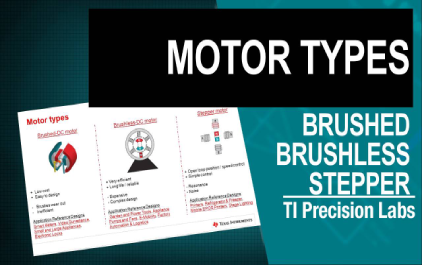 未学习 2、电机类型
未学习 2、电机类型
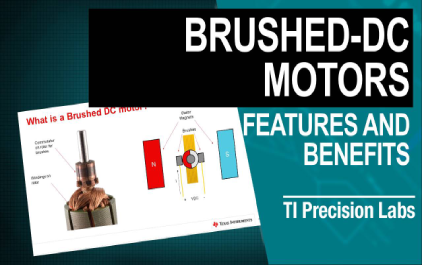 未学习 1、刷式直流基础
未学习 1、刷式直流基础
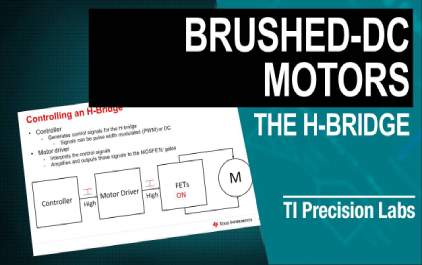 未学习 2、H-Bridge
未学习 2、H-Bridge
 未学习 1、步进电机驱动器基础
未学习 1、步进电机驱动器基础
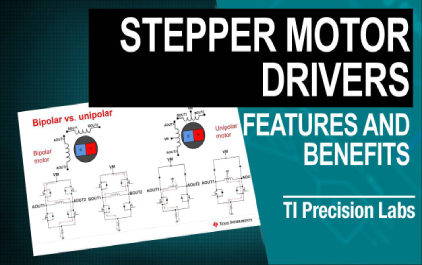
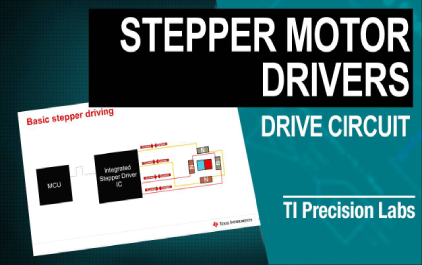 未学习 2、步进电机驱动电路
未学习 2、步进电机驱动电路
 未学习 3、双极步进电机中的微步进
未学习 3、双极步进电机中的微步进
 未学习 4、集成式步进驱动器控制接口
未学习 4、集成式步进驱动器控制接口
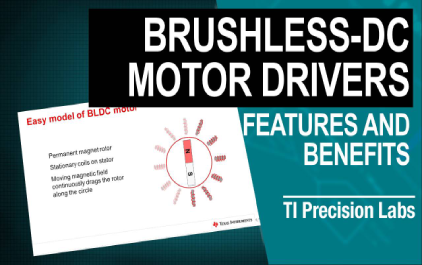 未学习 1、无刷直流基础
未学习 1、无刷直流基础
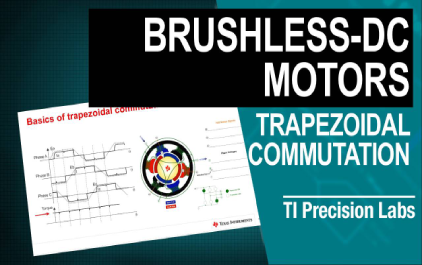 未学习 4、梯形换向
未学习 4、梯形换向
 未学习 1、保护功能
未学习 1、保护功能











