基于AM57xx 和 DLP4500 结构光原理的嵌入式 3D 扫描仪
播放器加载失败: 未检测到Flash Player,请到
安装
将在30s后自动为您播放下一课程
那大家知道或者接触过的 DLP产品有什么 OK 这位同事先举手的啊 OK,我们可以给个奖品。 没错 我相信大家都接触过DLP的产品 包括我们今天看到的这个,所用的这个投影机 包括平时大家在跟老婆孩子,跟朋友去电影的时候,电影院里的 这种电影 都是基于DLP的技术去做的 那开始之前的话,我先介绍下我自己 我叫Terry Yuan 袁国航 我是我们DLP中国市场部的市场拓展 我主要负责的是DLP技术在工业汽车 相关领域的一个市场 很高兴今天给大家带来这样的一个讲座 那开始之前呢,我每次都要去讲一下TI的这个DLP的历史。 这个其实我是蛮骄傲的 那为什么呢 DLP技术是TI的一个专利 它的全称英文是digital light processor 数字光处理 那我们是在1987年Larry Hornbeck 博士 发明的这样的一个技术 最早它的确是用在投影机上、 电影院里, 商业投影机,或者我们在办公室里用的这种 看PPT slide用的投影机 那我们也是在 2000年以后,把这样的一个产品在往不同的市场在做拓展 在中国这些年比较火的就是 像奇米啊,坚果啊这种 微投盒子 无屏电视 包括昨天小米发布的一个 E80P的激光电视,买9999的一个150寸的激光电视 那全是基于TI的DLP做的 基于TI的DLP技术 那么,这些只是我们传统的视频显示之类的DLP技术应用 我们用DLP技术再做一些图像的显示 照片的显示 在做人眼的一些视觉 那在2012年以后 我们也在做一些别的市场的推广 在(做)一些拓展 比如说我们把DLP技术带入到了医疗应用领域 工业应用领域 以及汽车应用领域 那同时 我们在15年 凭借DLP技术 给电影行业带来了一个变革 拿到了一个奥斯卡奖 这个就是我们说的那个小金人 TI德州仪器也是唯一一个 半导体厂商 拿过小金人的公司 现在大家如果有机会到我们总部去的话 我们会有一个专门的房间,在把这个小金人放在里面 估计这也是唯一的半导体公司有八卦机会的 那TI的DLP产品 其实我们的产品分布很广 我们主要的是有几个产品类型 那第一个,我们叫DLP的 Display 就是我说的显示,刚才我说过的显示, 无论是我们的微投里的显示 在商业投影机里的显示 还是在电影院里面的显示 那这些都是属于显示类 都是为了显示一些图像、视频 那这个也是大家接触最多的 那其次,就是我们右边有三个新兴的领域 那这三个领域是我们现在看到DLP技术在市场上 增长潜力最大、机会也最多的市场 一个我们叫工业,工业市场 今天我们讲的3D的新视觉就是属于工业的领域 当然它也包括了一些,像3D打印、数字光刻 光路分析这些传统的工业的领域 还有一个就是sensing 那这也是我们DLP最近在一直升级研究的一个领域 它其实是一个传感感知的一个领域 可能大家有些人在网上会看啊,下一代的新的这个iPhone8 据说会有一个3D的摄像头 那它里面做的这个功能就叫做sensing 那我们这个领域其实就是在做类似的事情 那最后一个就是汽车 用我们DLP的这种高亮度 高分辨率、高可塑性的 这个显示方式去做一些车内的抬头显示 增强限时的HOD 包括一些智能大灯 讲了这么多DLP我们的产品 那DLP这个技术它是怎么工作的呢 这个我要讲一下,就是DLP它其实是一个 我们是光的一个调制的芯片 它基本上的架构是,我们在 芯片的底层,在我们的这个DLP的底层 会有一个[Inaudible]的内存单元 然后在上面会覆盖 不同分辨率的小镜子 那每一个小镜子的样子大概是像这样子的 它的大小是在微米级的 从五点几微米到十点几微米 这么大,就这样一个镜子,是这么大, 那我为什么说镜子,包括刚才 后面的那位同事有说过,我们DLP里面的核心器件是叫做 DMD 数字微镜 那这个材质它是金属铝做的 它就像一个小镜子 一样,它可以反射我们的入射光 当我们的光线通过光源部分 照到我这个小镜子的时候 我通过底下的[Inaudible]芯片 去调制镜子的翻转 最终实现了我投影链上对单一像素点的 一个开关 当我把这样的小镜子排布成一个阵列的时候 那我就可以通过这样的翻转 去调制出一个画面 所以我们DLP里的核心器件的名字叫DMD digital micro-mirror device,数字微镜 它是一个类似于金属像素点的一个阵列 我们通过调制阵列的镜子的翻转 实现了最终图像显示 所以这是一个很精密的设备 一个MAPS设备 我可以给大家看一下一个原型吧 那我手里拿的这样的一个器械 那这个就是DLP系统里的核心器件 叫DMD 大家看到它中心闪闪发光的地方 就是我说的这个金属镜子 那举个例子 在这样的一个,我们叫panel,在这样的一个panel里边 它是一个1080 [Inaudible]的一个分辨率 也就是说在这样的一个分辨率,这么一个大小的区域里面 我们有1920X1080个 这样子的点 所以它是很精密的一个mix 所以在网上啊,或者在我们圈内啊,很多人说 DLP技术 或者DMD其实是TI的一个黑科技 怎么在这么小的一个区域里面 做出这么多的微镜的单元在里面 Ok,那这张共图其实就可以给大家 就是浅显地告诉大家我们DLP系统的工作方式 我们是通过调试微镜 实现光的调制 而且我的光路整个是一个反射系统 是一个投射系统 所以为什么很多朋友说 DLP是什么的时候,就会说DLP是一个 投影设备 它是投影机 那同时 我们在说这个投影的时候 我们讲的都是可见光,这个光线我要投射了,要能看见 但真正对于我们的DMD芯片来说 我其实的能力是能支持到很多的光的波段 我在可见光420到700之间 我可以去进行光的调制 我同时也可以在进紫外的这个 光的波段之内进行调制 更进一步 我可以在一些近红外的 这些波段进行调制 正是因为我们有对于光源的不同支持 我们就可以在 一些类似于工业 特殊的行业领域里面 做出一些非显示的一些功能出来 大家可以看到 这个就是微镜 数字微镜DMD 中间的区域打开以后 它就是这样子的微镜的一个矩阵 每一个矩阵都是几个微米级的 那同时我们可以也是可以支持不同的光源 像灯泡 LED 激光 都可以去支持它 那前面讲的都是我们DLP技术本身 什么是DLP,DLP的核心器件是什么 那现在我进到我们的主题 就是DLP怎么在我的一个3D的 视觉 机器视觉的一个场景里发挥它的作用 那首先讲一下,简单提一下3D 的机器视觉 那在座的各位,有一些朋友是做视觉类的应用 可能最早的时候 从我们的平面视觉 2D的视觉 再现在慢慢地有3D的一些需求 3D视觉 这是因为我们的应用场景,它也在做一些变化 我的一些工厂自动化 我的一些消费类的一些人机互动 需要3D的场景 做一些3D的建模 甚至在一些汽车领域 也都是需要一些3D的这种 图像捕获的能力 或者说 是产生3D模型的能力 去做一个人机互动 那我们现在看到 举个例子 在工业类 我们的3D视觉主要是在哪些行业或者是哪些应用, 会用的比较多呢 比如第一个,就是在产线上做一个定位 做一些抓取,我的机器手臂,我去捡我的物料的时候 我要知道我底下的物料是什么 然后,方便我的机器手臂进行定位 我2D的视觉也可以做,但是我的2D视觉带来的就是说,误差可能会比较大一些 那我需要有3D的信息,需要有[inaudible] 需要有[inaudible]的信息 能更好的识别出我的物料 包括一些检测类应用 比如说,我们有客人在做一些车子漆面的检测 那车子在喷漆完了以后,在研磨以后,它的表面是有一些颗粒 或者说一些气泡。我怎么去把这个东西检测出来 那这个也是视觉类的应用 它是需要3D的。因为2D的信息其实很难去把一些 很细小的瑕疵检测出来 包括一些生物的造影 一些侦测 包括一些现在的这种[inaudible]的游戏啊 包括这些互动的游戏啊 比如我们电影上面经常看到哪个间谍去 去房间进入密室的时候,他需要 把这个人脸的信息扫描出来 去做一个人脸的识别 这些都是三维的机器视觉会应用到的领域 那怎么去做一个三维的机器视觉 那传统的 我们其实是有几种方式 第一种常见的方式 就是我们叫一个 多幕,多幕镜头的方式 一般我们在做二维视觉的时候 我们就是一个摄像机,Camera, 我去 拍摄一张照片,通过纯软件的识别方式 去把整个图片的信息点拿出来,那我如果 在这样的一个系统里面,我再多加一个Camera, 再加一个摄像头,那我其实可以通过 通过软件的方式去识别出物品本身的信息 实现3D的一个视觉构建 那这个可能是我们现在 对于做视觉应用里面最容易上手的,因为它不需要 额外的辅助器件 只需要加一个摄像头软件 那其次我们在产线上 见到比较多的,我们叫一个single line laser scan solution 就是说,我会有一个单数的激光发射器 在我的物体表面进行扫描 通过这样的一个辅助手段 加上一个相机 去拿出Z轴的信息 那还有一个叫做time of flight 就是TOF 刚才我们这边也有同事在问 TOF 那这个也是 这段时间比较火的 TI也有这样的一个solution 它是利用我们的这种,光线反射回来的时间 去计算我的飞行时间 去拿到Z轴的信息 那同时还有一个,我们叫structured light 结构光的方式 顾名思义,它是在我的被测物体表面 去打一些有机构的光的pattern 打一个光的图案上去 通过这样的图案,然后再结合一个相机 去实现最终的一个3D的抓取 当然这是我们现在在市面上看到会比较多的3D 视觉的实现方式 那每一种技术其实是有它自己的优缺点 也有它比较合适应用的一个领域和场景 那么DLP 我们做的是叫结构光的 3D机器视觉 DLP其实就是一个结构光的生成模块 那对于一个结构光来说,它是怎么去实现三维信息的采集呢 其实原理也很简单,它用的是这种 三角测量法去做的 我上面是一个被测物体 被测物体,如果我要截取它的三维信息 它一定是有一些三维的指标 比如它有高低的变化,还有一些 平整度的变化 那我在左侧,在一侧啊,我会有一个 结构光的生成器 去打一些固定的图案 结构光的pattern 那这个pattern打到物体上以后 我会有一个工业相机 同步地去抓取被测物体上整体上的一个画面 我的摄像机,或者说我后面的运算单元 其实我是知道,我打出去的pattern是什么样子 同时我抓取到相机上了以后物体 的pattern是什么样子 我通过比较两张画面之间的pattern的变化 因为光线照到人身上,或者照到物体上 它一定会有变化,因为你有高低,它就一定会有些形变 我的后端就会去比较这两者的形变 去实现最终Z轴信息的抓取 实现我们3D信息的测量 那对于所有的结构光方式 它都是类似于这样的原理 三角测量法去做的 那DLP的产品在一个结构光的产品里面,结构光 测量方式里面,能提供什么样不一样的功能,或者说 它的优势在哪里?首先第一个 就是我们,这个就要提到我们产品跟我们看的微投啊 或者我们看到的投影机区别在哪里了呢 因为我们在投影设备里面,无论是我们的这种 商业投影机,或者电影院 大家知道人眼对于帧率,分辨帧率的快慢 是有一个上限的 理论上,比如我们的电视是24帧 我们的电影院30帧,好一点的60帧 基本上就达到人眼能够分辨的这个上限了 所以说对于视频的应用的投影设备 它的帧率基本上会在60帧以内,这是常见的 但是在机器应用里面 机器视觉里面 相机的抓取速度可以很快 100帧 200帧 甚至高速相机 很多帧,那就决定了说,我的投影设备的 投射帧率也要能跟我的相机同步 所以我的DLP可以在这样的 一个场景里面提供很高的帧率 提供很高的翻转的速度 翻转速度决定了帧率 那我们的工业类的DLP 最快的帧率可以达到32K赫兹 就是一秒钟可以翻32000次 这是一个相当恐怖的数据 也就是说在利用DLP做的结构光生成器里 只要你的后端的摄像头 足够快,你的运算能力足够快 我前端给你的pattern,给你的结构光 就是足够快的 所以可以利用DLP的这个特性 去适应很多场景 我可以做到很快的一个扫描方式 比如在产线上我做in line的inspection, 做In line的检测 因为产线上时间就是钱 我不需要说,像有一些检测设备 可能我流水线到这边,物体过检测的时候要停一下 再走,停一下再走 我可以一直往前 这样的方式去测 然后包括在一些更手持类的扫描测量 或者跟人生物相关的测量里面 我的高帧率就代表了低误差 高精度 这个都是DLP可以提供的 那其次 我们会有一个波长的 的支持范围 我们的波长范围可以从365到2500 这个意思就是说,如果我只用可见光测量 其实我是没有办法覆盖所有的这种 视觉场景 比如说我测量人脸的时候 你用可见光去照,我用白光去照 人眼会刺激的很不舒服 如果,比如说我们的眼睛有一些问题的话 不能见强光,那其实对人眼是损害的 那在这种场景下 我就可以选用支持2500的近红外的DMD, 去用近红外的光去照射 这样的话,人眼其实是看不到的 对人体是没有损伤的 同时我在测一些特殊的物体的时候 比如说我们有一些重金属物体的测试 它其实对于可见光和近红外光的反射,其实反射效率很低 那我们就可以用我们的UV光 紫外线去测 这样就可以达到一个很好的测量效果 那同时 在我们工业用的DLP的 套件里 我们也会提供一些工业测量,工业视觉应用的 一些额外的功能。比如说 我们有一些外部的同步信号 我们可以支持8比特的一个翻转 同时我们的尺寸也可以做的很紧凑 这个都是我们别的这种方式,或者说消费类的投影机 没有办法去实现的 这个地方是从另外一个角度 告诉大家我们的优势在哪里 大家可以看到右边的这些黑白的条纹, 黑白格 它其实就是我刚才讲的pattern 就是我结构光生成器最终打出来的东西 它其实里面的,pattern本身的图案 是不一样的,我们有很多种 我们根据被测物体的大小,被测物体的表面Z轴的特性 包括被测物体的属性 这个图案可以有很多种 那也就是说要求我的结构光生成器 我能够很灵活地去改变我的图案 那现有的机构光生成器可能用的都是一些 固定的图案 或者说它只能改一两副 、两三副的图案 那也就是说我用这样的,现有的结构光生成器做的 3D机器视觉的产品 我可能只能去覆盖一部分的 器件 我不能做到一台设备去测量很多的设备 和器件 但DLP的设备是可以的 因为我们是一个可编程的 然后用数字控制的一个结构光生成器 那这是一个典型的结构光的3D 视觉系统的光图 很简单 可能也比较小 那第一个主要的部分 就是在这个区域 那这也是TI提供的,DLP产品线提供的 结构光生成器 用来投射结构光的产品 那其次在这边会有一个标准的工业相机 那这个工业相机你可以用[inaudible]的 你可以用[inaudible],可以用一些国内的产品 都可以。是一个标准的工业相机 那它们之间 会有一些同步信号和控制信号 最终相机抓取的数据 会到我的后端处理器 无论是PC还是我等会讲的AM572系列 去进行处理,最终 生成3D视觉中的电源图 这是一个典型的系统框图 那同时TI也提供了类似的参考设计 因为我知道,可能对于我们有些客人在使用的时候 还是希望有一些能够很容易上手的东西 所以我们会提供一些参考设计 那这部分的话 大家可以看到这边中间有三个 就是基于DLP结构光生成器的一个三维 机器视觉的一个产品 那它根据我们里面使用的相机的分辨率的大小 刚才我有说到 我们的这个panel是有大小的 首先第一个分辨率它会不一样 其次我中间的panel尺寸也会不一样 这个是现在工业类比较大的,是一个0.95英寸的 那同时我们还会有一些很小的 比如说像这颗 0.45英寸的 分辨率也是WXJA的 那分辨率也是不一样的,那我们同时就是 TI也提供了针对不同分辨率的 3D机器视觉的参考设计 因为我们被检测物体的大小不一样 我们对精度的要求也不一样 大家也可以在TI的这个库里进行选择 那这是我们的一个基于DLP6500 这是我们DLP芯片的型号 基于DLP6500 1080P的3D 扫描的一个参考设计 大家可以看到它大概就是这样的一个样子 这一部分是工业相机 底下是DLP结构光的生产模块 这部分是我的一个接收板 这是测量时候的一个场景 三维扫描时候的一个场景 大家可以看到被测的是一个很复杂的 一个齿轮件,一个结构件 在这个上面的话,会有很多像条纹一样的东西 这个就是pattern 因为我这是一个静态图 不是动态图 所以我讲一下,就是其实这个pattern 会变,会不停地在往上打 然后通过去打这个pattern 然后,我的相机在一侧抓取数据 并运算出最终的电源图 大家可以看到 彩色的就是我们视觉应用 已经抓取到的 数字的点云数据 就是已经被扫描出来的数据 那上面是我们原始的数据 那这一套参考的东西 TI都会提供 在TI官网中都会有 那这样的一个参考设计包含什么 首先第一个 包含了我们的硬件 你需要什么样的硬件 TI提供了基于DLP的结构光生成器 提供了所有的接口 公共版。当然,相机部分,因为TI没有这种工业相机 那我们会推荐几个相机 大家可以去选 那其次 我们包含了系统设计 这个里面就有一些我们怎么去组装 怎么去设计我们的结构件 怎么去做evaluation的一些user guide 包括我们的一些测试的数据 测试的数据 还有我们的系统的框图 还有我们的[inaudible] 这些都可以在TI官网上拿到 那最重要的,刚才我前面讲到的这些东西 都是硬件本身 那对于这样的一个系统的话,软件是很重要的 我相机抓取了以后,我怎么去把它做成电源图,怎么去算 那TI同样也是提供了一个SDK 我们叫lightcrafter SDK 也就是说大家在我们官网上找到这个link 去拿到这些所有硬件 把结构搭起来 去下载我们的SDK 就可以去实现 扫描的功能 3D视觉的功能 那这个就是我要讲的一个核心器件 基于TI DLP4500 lightcrafter 结构光生成器 那大家看到这个东西其实是一个电路板加底下的 一些光学器件 还有一些成像器件 那我刚才说到的DLP的核心器件DMD 就在这个板子里面 看不见,它不像我们 [inaudible]一样 是在表面贴着 它是在这个[inaudible]底下 组装在里面的 因为对于一个DLP系统来说 我们的这个器件制作光路调制 我还需要一些外部的光源 比如LED 我需要透镜 我需要棱镜 我还需要一些结构件来固定 那这部分的东西 我相信对于大家来说 其实是蛮难去搞的 因为毕竟我们是做电子的 那这些光学的东西很难去 - 完全不是一个领域 所以我们TI提供的开发板是 把所有的器件放在里面打包好 大家拿这样一个evalution的Kit 只要去接一个HDMI 或者通过SDI 烧录一些我预制的Pattern 我上电 我就可以去投射这样的一个 pattern出来 去跟你的后棱镜结合 那同时回到SDK SDK软件的部分我们提供什么 第一就是我们这个驱动,整个平台的驱动 怎么去把我的平台驱动起来 我包含所有控制件的驱动 还有一些接口的驱动 第二 calibration 就是在一个典型的结构光测量系统里面 我有camera 我有projector 我还有一些我的被测物体 那这之间是要做标定的 所有的测量系统都要做标定 那我们在SDK里面也提供了标定的方式 怎么去标定 对于工业相机的支持 我们会预制一些 我印象中现在应该是 灰点的工业相机 那我们也预留一些标准接口 大家可以去调一些自己的工业相机 其次 我的结构光怎么去让它往出打 怎么去调制这些结构光 以及最后 点云图的算法 怎么去把点云图算出来 然后点云图怎么再重建成我的三维模型 这些都是有的 那举两个例子 前面刚才讲了一些我们理论上的应用方式 以及我们的参考设计,那么这样的三维的一个 成像方式 或者说我们的机器视觉 应用在哪些领域呢 这是我们两个客人做的产品 一个是seikowave 是一家美国还是加拿大的公司 它用我们的结构光生成器 DLP的结构光生成器 做了这样的一个器件 它是用来检测什么 它用来检测这个地方 这是一个像一个曲面的一个金属 它其实是用来检测管道的锈迹 就是在欧美,尤其是在俄罗斯或者美国 有很多户外的这种输出管 是在露天的 那输出管是金属的 它一定会发生氧化 会锈,那锈了的话就会裂 或者以后出现漏油的问题 那因为管道很长 我们的客人不可能说时时刻刻派工人在那边去检测 所以它就需要用到视觉的应用 让机器人去做 但对于这种锈迹来说 我们往往是要防患于未然的 就是在它锈之前就要检测问题在哪里 大家知道所有的金属在氧化的时候它会发生 形变 就是我们说生锈了 它会有锈 那这个锈在初期的时候它其实是很小的 可能它的凸起或者它的形变 是几十个微米级的 那这个时候就要用到结构光 去做微米级的检测 他做了这样的一个器件 把它套在管道上 让它实时移动 进行翻转 最终检测出它上面的这个瑕疵 或者锈迹 那这边是我们上海的一家公司 叫carestream 它做的一个齿科类的扫描 那它为什么也要用到结构光呢 就是,如果在座的有一些朋友去看过牙齿 无论是镶牙齿或者是怎么样 你都会有经验 尤其是你要拔下牙齿 他会让你去做咬模 给你一些石膏还是石蜡什么样的东西 让你去咬 咬到了以后 拿出一个模型再去 加工 那这个其实对于我们来说 是很痛苦的一个过程 而且有时候一次咬不准 很难受 那就有这样的一个叫口内的扫描仪 它利用结构光高精度 高速的方式 去直接在你的牙齿上过一圈 我就可以把我牙齿的3D信息直接构建出来 最终送到牙科所去做牙齿的制造 那这两个应用其实都是一个很典型的工业 和一些,比如消费或者行业内的一些三维成像 的一些应用 那在这个地方 其实还有一个DLP结构光很重要的一个优势 我在前面没有讲 就是我们的 高精度 像这样的几十个微米的锈迹 还有牙齿的一些细节 因为大家知道 如果牙齿扫描的不准的话 做出来镶进去 也很很难受 会磨 会怎么样 会抱怨 你可能说这个医院水平太差 手艺活太差 所以 每个人的牙齿也又不一样 所以它对整个的精度要求也是很高的 也是在几十个上百个微米级的 误差范围 所以 这都是DLP的结构光能够带来的优势 就是用DLP的结构光这个模板 我们是可以达到微米级的扫描精度 所以我一说这个微米级的扫描精度 可能有做过视觉类的同事就知道 哦 原来你跟TUF 你跟双目 你跟别的方式 它最大的区别在哪里 那前面我讲的所有东西都是基于DLP 基于DLP结构光的三维视觉应用 那最后我再提一下 因为今天 我们有很多同事介绍了我们TI的 多核一构的处理器 AM57系列,AM Sitara AM 4几系列 那同时 我们TI 也提供了一套基于这样的多核一构处理器的 嵌入式的3D扫描方案 那这个是我们的多核一构处理器的一个介绍 我就不详细概述了 主要就是我们的性能会比较高 我们的架构会比较领先 我们会有BST 我们有graphic 我们会有多核使用 以后可能有537几 去处理不同的事情 我们的mix很强 那这是我们AM57系列的一个家族图 可以看到其实我们根据不同的型号 会有不同的AM核 刚才的D15,有双核1.5G 有单核 我们有一个C66,DSP 我们有Cortex M4 去处理不同的任务 然后我们还有一些graphic的 一些加速 还有外部的一些接口 那TI在去年年底 今年年初的时候 我们发布了这样的一个参考设计 就是把我们刚才我提到的 SDK 它原本是在PC上的 我们把这个SDK从PC移到了我们刚才提到的Sitara上 就是AM57X系列 那这个有什么好处呢 这个好处就是说 我现在在市场上看到有很多 客人需要去PC化的一个视觉类的设计 大家想一下我刚才说的那个石油管道的东西 那我如果要做扫描 我最终的点云图 是要PC去做 那就是说我的机器上 我后面还要再拖一个PC 或者一个laptop 这个东西在室外的话其实是很suffer的 很容易出问题的 那如果我有一个嵌入式的方式 我有这样的一个公共版 我把所有这部分的东西都放在我的 处理器上面去做 等于说我就是有一个lightcrafter 450的板 再加一个控制板 做到一个很紧凑的设备 我不需要PC 我的设备做的很小型化 同时我可以在我的这个平台再去加一些 比如无线、WiFi、蓝牙、GSM的模块 让它直接可以上到云端 那这样的话 我的整个的在 现场的一个布置 就会比较灵活 我的设备也比较满足我们以后会说的 工业4.0啊 智能制造 这样的一个趋势 那这个就是我们提供的参考设计的一个大概的一个样子 大家可以看到 在右下角这张图 可能比较小一些 这个架子 就是我刚才说的,我们的结构光生成器和camera,工业相机 同时我们会有USB,我们会有 trigger类的一些 GPL,去连到我的572X的一个开发板上 那在这个图以外 我们是没有PC的 我们所有的运算,我们所有的点云的生成 都是在5728上去做的 那关召林这边 如果有机会做产品的话 你就可以打一个板子 把5728 跟我这边的结构光生成器放在一起 那我们以后的基于结构光3D扫描的模块 可能就只有这样的样子 就很小的一个产品 没有PC 这张图是一个分解图 这样的一个参考设计 第一个 包含了我们的lifecrafter 450 和我刚才讲的DLP的结构光生成器 一个相机,工业相机 然后再加我们的一个EBI 那点云图的所有的逻辑 所有的算法都在我们的SDK里,都做好了 放在我们的EBI上 最终点云就可以在这里看到 当然你可以接一个HDMI 把它显示在显示设备上 你也可以去接WiFi 你可以去接GSM 3G、4G让它传到云端 这几个就是比较灵活的一个方式 那当然我们的参考设计是基于TI的DLP比较大 那我们同时在外面会有我们的第三方 像在门口我们的[inaudible]社区 我们的[inaudible]vision 他们就有一个板子 会把我们的 lifecrafter 450 控制的部分 和572X系列 处理器的部分 包括一些[inaudible]无线的一些模块 放在一个板子上 大家一会结束了可以去到那边看一下 也方便大家以后的一个设计 所以从我们的角度做一个summary 我们觉得,我相信很多在座的各位是 第一次接触DLP 尤其是DLP的结构光在工业上的应用 大家可能会觉得DLP是不是用起来很麻烦 里面有很多光学的东西 那我们本地 无论是TI总部还是本地 我们也是做了很多的东西 在简化我们的上手过程 我们把我们的芯片做了模块化的一些设计 所以说 从我们的角度,我们觉得如果您要做一个基于DLP的一个结构光 方案 也很简单 第一 先到我们的ti.com上 去找对应的我们的参考设计 以及我们设计使用到的一些 辅助文档 视频 增进你的了解 第二 根据你被测物体的大小 你想要的精度 分辨率 然后去选择一个合适的TI的EVI 或者是我们第三方的开发板 那这个开发板会集成所有需要测量的光源 镜头 这些所有的辅助器件 你拿来就用 不用管里面的DLP是怎么设计光路的 然后同时如果有问题的话 可以在线包括我们的E2E 有些同事用过 我们会有一些在线支持的网站 去拿到相应的支持 最终根据我们的参考设计 去设计出您这边自己的一个产品出来 所以这个也是从我们的角度 我们觉着也是 比较容易上手 最起码也是比较容易评估这个产品 当然我们的EVI 我们的第三方做的东西是我们现有的产品 就我们现有的能耗搭建出来的一些产品 如果说在做的各位有一些自己的想法 比如我测量的东西 我有一些 有一些独一无二的地方 或者说我的系统设计有些特殊的要求 我们在本地 在上海 在深圳 我们都有我们的工程师团队 包括我们在深圳 在北京 在上海华东地区 都有很多我们第三方的合作伙伴 可以根据您的需要去定制你们的光学设计、镜头设计 包括一些系统的设计 那这些具体的东西 可以下来找我再聊 因为我们今天时间也比较紧 那我最后的话 留一下我的联系方式在这里 我叫Terry Yuan 袁国航 我本身的办公地点 我在上海 但我也会到处跑 那这是我的联系方式 和邮件 欢迎大家后面有问题的话 跟我联系 OK 谢谢大家
那大家知道或者接触过的 DLP产品有什么 OK 这位同事先举手的啊 OK,我们可以给个奖品。 没错 我相信大家都接触过DLP的产品 包括我们今天看到的这个,所用的这个投影机 包括平时大家在跟老婆孩子,跟朋友去电影的时候,电影院里的 这种电影 都是基于DLP的技术去做的 那开始之前的话,我先介绍下我自己 我叫Terry Yuan 袁国航 我是我们DLP中国市场部的市场拓展 我主要负责的是DLP技术在工业汽车 相关领域的一个市场 很高兴今天给大家带来这样的一个讲座 那开始之前呢,我每次都要去讲一下TI的这个DLP的历史。 这个其实我是蛮骄傲的 那为什么呢 DLP技术是TI的一个专利 它的全称英文是digital light processor 数字光处理 那我们是在1987年Larry Hornbeck 博士 发明的这样的一个技术 最早它的确是用在投影机上、 电影院里, 商业投影机,或者我们在办公室里用的这种 看PPT slide用的投影机 那我们也是在 2000年以后,把这样的一个产品在往不同的市场在做拓展 在中国这些年比较火的就是 像奇米啊,坚果啊这种 微投盒子 无屏电视 包括昨天小米发布的一个 E80P的激光电视,买9999的一个150寸的激光电视 那全是基于TI的DLP做的 基于TI的DLP技术 那么,这些只是我们传统的视频显示之类的DLP技术应用 我们用DLP技术再做一些图像的显示 照片的显示 在做人眼的一些视觉 那在2012年以后 我们也在做一些别的市场的推广 在(做)一些拓展 比如说我们把DLP技术带入到了医疗应用领域 工业应用领域 以及汽车应用领域 那同时 我们在15年 凭借DLP技术 给电影行业带来了一个变革 拿到了一个奥斯卡奖 这个就是我们说的那个小金人 TI德州仪器也是唯一一个 半导体厂商 拿过小金人的公司 现在大家如果有机会到我们总部去的话 我们会有一个专门的房间,在把这个小金人放在里面 估计这也是唯一的半导体公司有八卦机会的 那TI的DLP产品 其实我们的产品分布很广 我们主要的是有几个产品类型 那第一个,我们叫DLP的 Display 就是我说的显示,刚才我说过的显示, 无论是我们的微投里的显示 在商业投影机里的显示 还是在电影院里面的显示 那这些都是属于显示类 都是为了显示一些图像、视频 那这个也是大家接触最多的 那其次,就是我们右边有三个新兴的领域 那这三个领域是我们现在看到DLP技术在市场上 增长潜力最大、机会也最多的市场 一个我们叫工业,工业市场 今天我们讲的3D的新视觉就是属于工业的领域 当然它也包括了一些,像3D打印、数字光刻 光路分析这些传统的工业的领域 还有一个就是sensing 那这也是我们DLP最近在一直升级研究的一个领域 它其实是一个传感感知的一个领域 可能大家有些人在网上会看啊,下一代的新的这个iPhone8 据说会有一个3D的摄像头 那它里面做的这个功能就叫做sensing 那我们这个领域其实就是在做类似的事情 那最后一个就是汽车 用我们DLP的这种高亮度 高分辨率、高可塑性的 这个显示方式去做一些车内的抬头显示 增强限时的HOD 包括一些智能大灯 讲了这么多DLP我们的产品 那DLP这个技术它是怎么工作的呢 这个我要讲一下,就是DLP它其实是一个 我们是光的一个调制的芯片 它基本上的架构是,我们在 芯片的底层,在我们的这个DLP的底层 会有一个[Inaudible]的内存单元 然后在上面会覆盖 不同分辨率的小镜子 那每一个小镜子的样子大概是像这样子的 它的大小是在微米级的 从五点几微米到十点几微米 这么大,就这样一个镜子,是这么大, 那我为什么说镜子,包括刚才 后面的那位同事有说过,我们DLP里面的核心器件是叫做 DMD 数字微镜 那这个材质它是金属铝做的 它就像一个小镜子 一样,它可以反射我们的入射光 当我们的光线通过光源部分 照到我这个小镜子的时候 我通过底下的[Inaudible]芯片 去调制镜子的翻转 最终实现了我投影链上对单一像素点的 一个开关 当我把这样的小镜子排布成一个阵列的时候 那我就可以通过这样的翻转 去调制出一个画面 所以我们DLP里的核心器件的名字叫DMD digital micro-mirror device,数字微镜 它是一个类似于金属像素点的一个阵列 我们通过调制阵列的镜子的翻转 实现了最终图像显示 所以这是一个很精密的设备 一个MAPS设备 我可以给大家看一下一个原型吧 那我手里拿的这样的一个器械 那这个就是DLP系统里的核心器件 叫DMD 大家看到它中心闪闪发光的地方 就是我说的这个金属镜子 那举个例子 在这样的一个,我们叫panel,在这样的一个panel里边 它是一个1080 [Inaudible]的一个分辨率 也就是说在这样的一个分辨率,这么一个大小的区域里面 我们有1920X1080个 这样子的点 所以它是很精密的一个mix 所以在网上啊,或者在我们圈内啊,很多人说 DLP技术 或者DMD其实是TI的一个黑科技 怎么在这么小的一个区域里面 做出这么多的微镜的单元在里面 Ok,那这张共图其实就可以给大家 就是浅显地告诉大家我们DLP系统的工作方式 我们是通过调试微镜 实现光的调制 而且我的光路整个是一个反射系统 是一个投射系统 所以为什么很多朋友说 DLP是什么的时候,就会说DLP是一个 投影设备 它是投影机 那同时 我们在说这个投影的时候 我们讲的都是可见光,这个光线我要投射了,要能看见 但真正对于我们的DMD芯片来说 我其实的能力是能支持到很多的光的波段 我在可见光420到700之间 我可以去进行光的调制 我同时也可以在进紫外的这个 光的波段之内进行调制 更进一步 我可以在一些近红外的 这些波段进行调制 正是因为我们有对于光源的不同支持 我们就可以在 一些类似于工业 特殊的行业领域里面 做出一些非显示的一些功能出来 大家可以看到 这个就是微镜 数字微镜DMD 中间的区域打开以后 它就是这样子的微镜的一个矩阵 每一个矩阵都是几个微米级的 那同时我们可以也是可以支持不同的光源 像灯泡 LED 激光 都可以去支持它 那前面讲的都是我们DLP技术本身 什么是DLP,DLP的核心器件是什么 那现在我进到我们的主题 就是DLP怎么在我的一个3D的 视觉 机器视觉的一个场景里发挥它的作用 那首先讲一下,简单提一下3D 的机器视觉 那在座的各位,有一些朋友是做视觉类的应用 可能最早的时候 从我们的平面视觉 2D的视觉 再现在慢慢地有3D的一些需求 3D视觉 这是因为我们的应用场景,它也在做一些变化 我的一些工厂自动化 我的一些消费类的一些人机互动 需要3D的场景 做一些3D的建模 甚至在一些汽车领域 也都是需要一些3D的这种 图像捕获的能力 或者说 是产生3D模型的能力 去做一个人机互动 那我们现在看到 举个例子 在工业类 我们的3D视觉主要是在哪些行业或者是哪些应用, 会用的比较多呢 比如第一个,就是在产线上做一个定位 做一些抓取,我的机器手臂,我去捡我的物料的时候 我要知道我底下的物料是什么 然后,方便我的机器手臂进行定位 我2D的视觉也可以做,但是我的2D视觉带来的就是说,误差可能会比较大一些 那我需要有3D的信息,需要有[inaudible] 需要有[inaudible]的信息 能更好的识别出我的物料 包括一些检测类应用 比如说,我们有客人在做一些车子漆面的检测 那车子在喷漆完了以后,在研磨以后,它的表面是有一些颗粒 或者说一些气泡。我怎么去把这个东西检测出来 那这个也是视觉类的应用 它是需要3D的。因为2D的信息其实很难去把一些 很细小的瑕疵检测出来 包括一些生物的造影 一些侦测 包括一些现在的这种[inaudible]的游戏啊 包括这些互动的游戏啊 比如我们电影上面经常看到哪个间谍去 去房间进入密室的时候,他需要 把这个人脸的信息扫描出来 去做一个人脸的识别 这些都是三维的机器视觉会应用到的领域 那怎么去做一个三维的机器视觉 那传统的 我们其实是有几种方式 第一种常见的方式 就是我们叫一个 多幕,多幕镜头的方式 一般我们在做二维视觉的时候 我们就是一个摄像机,Camera, 我去 拍摄一张照片,通过纯软件的识别方式 去把整个图片的信息点拿出来,那我如果 在这样的一个系统里面,我再多加一个Camera, 再加一个摄像头,那我其实可以通过 通过软件的方式去识别出物品本身的信息 实现3D的一个视觉构建 那这个可能是我们现在 对于做视觉应用里面最容易上手的,因为它不需要 额外的辅助器件 只需要加一个摄像头软件 那其次我们在产线上 见到比较多的,我们叫一个single line laser scan solution 就是说,我会有一个单数的激光发射器 在我的物体表面进行扫描 通过这样的一个辅助手段 加上一个相机 去拿出Z轴的信息 那还有一个叫做time of flight 就是TOF 刚才我们这边也有同事在问 TOF 那这个也是 这段时间比较火的 TI也有这样的一个solution 它是利用我们的这种,光线反射回来的时间 去计算我的飞行时间 去拿到Z轴的信息 那同时还有一个,我们叫structured light 结构光的方式 顾名思义,它是在我的被测物体表面 去打一些有机构的光的pattern 打一个光的图案上去 通过这样的图案,然后再结合一个相机 去实现最终的一个3D的抓取 当然这是我们现在在市面上看到会比较多的3D 视觉的实现方式 那每一种技术其实是有它自己的优缺点 也有它比较合适应用的一个领域和场景 那么DLP 我们做的是叫结构光的 3D机器视觉 DLP其实就是一个结构光的生成模块 那对于一个结构光来说,它是怎么去实现三维信息的采集呢 其实原理也很简单,它用的是这种 三角测量法去做的 我上面是一个被测物体 被测物体,如果我要截取它的三维信息 它一定是有一些三维的指标 比如它有高低的变化,还有一些 平整度的变化 那我在左侧,在一侧啊,我会有一个 结构光的生成器 去打一些固定的图案 结构光的pattern 那这个pattern打到物体上以后 我会有一个工业相机 同步地去抓取被测物体上整体上的一个画面 我的摄像机,或者说我后面的运算单元 其实我是知道,我打出去的pattern是什么样子 同时我抓取到相机上了以后物体 的pattern是什么样子 我通过比较两张画面之间的pattern的变化 因为光线照到人身上,或者照到物体上 它一定会有变化,因为你有高低,它就一定会有些形变 我的后端就会去比较这两者的形变 去实现最终Z轴信息的抓取 实现我们3D信息的测量 那对于所有的结构光方式 它都是类似于这样的原理 三角测量法去做的 那DLP的产品在一个结构光的产品里面,结构光 测量方式里面,能提供什么样不一样的功能,或者说 它的优势在哪里?首先第一个 就是我们,这个就要提到我们产品跟我们看的微投啊 或者我们看到的投影机区别在哪里了呢 因为我们在投影设备里面,无论是我们的这种 商业投影机,或者电影院 大家知道人眼对于帧率,分辨帧率的快慢 是有一个上限的 理论上,比如我们的电视是24帧 我们的电影院30帧,好一点的60帧 基本上就达到人眼能够分辨的这个上限了 所以说对于视频的应用的投影设备 它的帧率基本上会在60帧以内,这是常见的 但是在机器应用里面 机器视觉里面 相机的抓取速度可以很快 100帧 200帧 甚至高速相机 很多帧,那就决定了说,我的投影设备的 投射帧率也要能跟我的相机同步 所以我的DLP可以在这样的 一个场景里面提供很高的帧率 提供很高的翻转的速度 翻转速度决定了帧率 那我们的工业类的DLP 最快的帧率可以达到32K赫兹 就是一秒钟可以翻32000次 这是一个相当恐怖的数据 也就是说在利用DLP做的结构光生成器里 只要你的后端的摄像头 足够快,你的运算能力足够快 我前端给你的pattern,给你的结构光 就是足够快的 所以可以利用DLP的这个特性 去适应很多场景 我可以做到很快的一个扫描方式 比如在产线上我做in line的inspection, 做In line的检测 因为产线上时间就是钱 我不需要说,像有一些检测设备 可能我流水线到这边,物体过检测的时候要停一下 再走,停一下再走 我可以一直往前 这样的方式去测 然后包括在一些更手持类的扫描测量 或者跟人生物相关的测量里面 我的高帧率就代表了低误差 高精度 这个都是DLP可以提供的 那其次 我们会有一个波长的 的支持范围 我们的波长范围可以从365到2500 这个意思就是说,如果我只用可见光测量 其实我是没有办法覆盖所有的这种 视觉场景 比如说我测量人脸的时候 你用可见光去照,我用白光去照 人眼会刺激的很不舒服 如果,比如说我们的眼睛有一些问题的话 不能见强光,那其实对人眼是损害的 那在这种场景下 我就可以选用支持2500的近红外的DMD, 去用近红外的光去照射 这样的话,人眼其实是看不到的 对人体是没有损伤的 同时我在测一些特殊的物体的时候 比如说我们有一些重金属物体的测试 它其实对于可见光和近红外光的反射,其实反射效率很低 那我们就可以用我们的UV光 紫外线去测 这样就可以达到一个很好的测量效果 那同时 在我们工业用的DLP的 套件里 我们也会提供一些工业测量,工业视觉应用的 一些额外的功能。比如说 我们有一些外部的同步信号 我们可以支持8比特的一个翻转 同时我们的尺寸也可以做的很紧凑 这个都是我们别的这种方式,或者说消费类的投影机 没有办法去实现的 这个地方是从另外一个角度 告诉大家我们的优势在哪里 大家可以看到右边的这些黑白的条纹, 黑白格 它其实就是我刚才讲的pattern 就是我结构光生成器最终打出来的东西 它其实里面的,pattern本身的图案 是不一样的,我们有很多种 我们根据被测物体的大小,被测物体的表面Z轴的特性 包括被测物体的属性 这个图案可以有很多种 那也就是说要求我的结构光生成器 我能够很灵活地去改变我的图案 那现有的机构光生成器可能用的都是一些 固定的图案 或者说它只能改一两副 、两三副的图案 那也就是说我用这样的,现有的结构光生成器做的 3D机器视觉的产品 我可能只能去覆盖一部分的 器件 我不能做到一台设备去测量很多的设备 和器件 但DLP的设备是可以的 因为我们是一个可编程的 然后用数字控制的一个结构光生成器 那这是一个典型的结构光的3D 视觉系统的光图 很简单 可能也比较小 那第一个主要的部分 就是在这个区域 那这也是TI提供的,DLP产品线提供的 结构光生成器 用来投射结构光的产品 那其次在这边会有一个标准的工业相机 那这个工业相机你可以用[inaudible]的 你可以用[inaudible],可以用一些国内的产品 都可以。是一个标准的工业相机 那它们之间 会有一些同步信号和控制信号 最终相机抓取的数据 会到我的后端处理器 无论是PC还是我等会讲的AM572系列 去进行处理,最终 生成3D视觉中的电源图 这是一个典型的系统框图 那同时TI也提供了类似的参考设计 因为我知道,可能对于我们有些客人在使用的时候 还是希望有一些能够很容易上手的东西 所以我们会提供一些参考设计 那这部分的话 大家可以看到这边中间有三个 就是基于DLP结构光生成器的一个三维 机器视觉的一个产品 那它根据我们里面使用的相机的分辨率的大小 刚才我有说到 我们的这个panel是有大小的 首先第一个分辨率它会不一样 其次我中间的panel尺寸也会不一样 这个是现在工业类比较大的,是一个0.95英寸的 那同时我们还会有一些很小的 比如说像这颗 0.45英寸的 分辨率也是WXJA的 那分辨率也是不一样的,那我们同时就是 TI也提供了针对不同分辨率的 3D机器视觉的参考设计 因为我们被检测物体的大小不一样 我们对精度的要求也不一样 大家也可以在TI的这个库里进行选择 那这是我们的一个基于DLP6500 这是我们DLP芯片的型号 基于DLP6500 1080P的3D 扫描的一个参考设计 大家可以看到它大概就是这样的一个样子 这一部分是工业相机 底下是DLP结构光的生产模块 这部分是我的一个接收板 这是测量时候的一个场景 三维扫描时候的一个场景 大家可以看到被测的是一个很复杂的 一个齿轮件,一个结构件 在这个上面的话,会有很多像条纹一样的东西 这个就是pattern 因为我这是一个静态图 不是动态图 所以我讲一下,就是其实这个pattern 会变,会不停地在往上打 然后通过去打这个pattern 然后,我的相机在一侧抓取数据 并运算出最终的电源图 大家可以看到 彩色的就是我们视觉应用 已经抓取到的 数字的点云数据 就是已经被扫描出来的数据 那上面是我们原始的数据 那这一套参考的东西 TI都会提供 在TI官网中都会有 那这样的一个参考设计包含什么 首先第一个 包含了我们的硬件 你需要什么样的硬件 TI提供了基于DLP的结构光生成器 提供了所有的接口 公共版。当然,相机部分,因为TI没有这种工业相机 那我们会推荐几个相机 大家可以去选 那其次 我们包含了系统设计 这个里面就有一些我们怎么去组装 怎么去设计我们的结构件 怎么去做evaluation的一些user guide 包括我们的一些测试的数据 测试的数据 还有我们的系统的框图 还有我们的[inaudible] 这些都可以在TI官网上拿到 那最重要的,刚才我前面讲到的这些东西 都是硬件本身 那对于这样的一个系统的话,软件是很重要的 我相机抓取了以后,我怎么去把它做成电源图,怎么去算 那TI同样也是提供了一个SDK 我们叫lightcrafter SDK 也就是说大家在我们官网上找到这个link 去拿到这些所有硬件 把结构搭起来 去下载我们的SDK 就可以去实现 扫描的功能 3D视觉的功能 那这个就是我要讲的一个核心器件 基于TI DLP4500 lightcrafter 结构光生成器 那大家看到这个东西其实是一个电路板加底下的 一些光学器件 还有一些成像器件 那我刚才说到的DLP的核心器件DMD 就在这个板子里面 看不见,它不像我们 [inaudible]一样 是在表面贴着 它是在这个[inaudible]底下 组装在里面的 因为对于一个DLP系统来说 我们的这个器件制作光路调制 我还需要一些外部的光源 比如LED 我需要透镜 我需要棱镜 我还需要一些结构件来固定 那这部分的东西 我相信对于大家来说 其实是蛮难去搞的 因为毕竟我们是做电子的 那这些光学的东西很难去 - 完全不是一个领域 所以我们TI提供的开发板是 把所有的器件放在里面打包好 大家拿这样一个evalution的Kit 只要去接一个HDMI 或者通过SDI 烧录一些我预制的Pattern 我上电 我就可以去投射这样的一个 pattern出来 去跟你的后棱镜结合 那同时回到SDK SDK软件的部分我们提供什么 第一就是我们这个驱动,整个平台的驱动 怎么去把我的平台驱动起来 我包含所有控制件的驱动 还有一些接口的驱动 第二 calibration 就是在一个典型的结构光测量系统里面 我有camera 我有projector 我还有一些我的被测物体 那这之间是要做标定的 所有的测量系统都要做标定 那我们在SDK里面也提供了标定的方式 怎么去标定 对于工业相机的支持 我们会预制一些 我印象中现在应该是 灰点的工业相机 那我们也预留一些标准接口 大家可以去调一些自己的工业相机 其次 我的结构光怎么去让它往出打 怎么去调制这些结构光 以及最后 点云图的算法 怎么去把点云图算出来 然后点云图怎么再重建成我的三维模型 这些都是有的 那举两个例子 前面刚才讲了一些我们理论上的应用方式 以及我们的参考设计,那么这样的三维的一个 成像方式 或者说我们的机器视觉 应用在哪些领域呢 这是我们两个客人做的产品 一个是seikowave 是一家美国还是加拿大的公司 它用我们的结构光生成器 DLP的结构光生成器 做了这样的一个器件 它是用来检测什么 它用来检测这个地方 这是一个像一个曲面的一个金属 它其实是用来检测管道的锈迹 就是在欧美,尤其是在俄罗斯或者美国 有很多户外的这种输出管 是在露天的 那输出管是金属的 它一定会发生氧化 会锈,那锈了的话就会裂 或者以后出现漏油的问题 那因为管道很长 我们的客人不可能说时时刻刻派工人在那边去检测 所以它就需要用到视觉的应用 让机器人去做 但对于这种锈迹来说 我们往往是要防患于未然的 就是在它锈之前就要检测问题在哪里 大家知道所有的金属在氧化的时候它会发生 形变 就是我们说生锈了 它会有锈 那这个锈在初期的时候它其实是很小的 可能它的凸起或者它的形变 是几十个微米级的 那这个时候就要用到结构光 去做微米级的检测 他做了这样的一个器件 把它套在管道上 让它实时移动 进行翻转 最终检测出它上面的这个瑕疵 或者锈迹 那这边是我们上海的一家公司 叫carestream 它做的一个齿科类的扫描 那它为什么也要用到结构光呢 就是,如果在座的有一些朋友去看过牙齿 无论是镶牙齿或者是怎么样 你都会有经验 尤其是你要拔下牙齿 他会让你去做咬模 给你一些石膏还是石蜡什么样的东西 让你去咬 咬到了以后 拿出一个模型再去 加工 那这个其实对于我们来说 是很痛苦的一个过程 而且有时候一次咬不准 很难受 那就有这样的一个叫口内的扫描仪 它利用结构光高精度 高速的方式 去直接在你的牙齿上过一圈 我就可以把我牙齿的3D信息直接构建出来 最终送到牙科所去做牙齿的制造 那这两个应用其实都是一个很典型的工业 和一些,比如消费或者行业内的一些三维成像 的一些应用 那在这个地方 其实还有一个DLP结构光很重要的一个优势 我在前面没有讲 就是我们的 高精度 像这样的几十个微米的锈迹 还有牙齿的一些细节 因为大家知道 如果牙齿扫描的不准的话 做出来镶进去 也很很难受 会磨 会怎么样 会抱怨 你可能说这个医院水平太差 手艺活太差 所以 每个人的牙齿也又不一样 所以它对整个的精度要求也是很高的 也是在几十个上百个微米级的 误差范围 所以 这都是DLP的结构光能够带来的优势 就是用DLP的结构光这个模板 我们是可以达到微米级的扫描精度 所以我一说这个微米级的扫描精度 可能有做过视觉类的同事就知道 哦 原来你跟TUF 你跟双目 你跟别的方式 它最大的区别在哪里 那前面我讲的所有东西都是基于DLP 基于DLP结构光的三维视觉应用 那最后我再提一下 因为今天 我们有很多同事介绍了我们TI的 多核一构的处理器 AM57系列,AM Sitara AM 4几系列 那同时 我们TI 也提供了一套基于这样的多核一构处理器的 嵌入式的3D扫描方案 那这个是我们的多核一构处理器的一个介绍 我就不详细概述了 主要就是我们的性能会比较高 我们的架构会比较领先 我们会有BST 我们有graphic 我们会有多核使用 以后可能有537几 去处理不同的事情 我们的mix很强 那这是我们AM57系列的一个家族图 可以看到其实我们根据不同的型号 会有不同的AM核 刚才的D15,有双核1.5G 有单核 我们有一个C66,DSP 我们有Cortex M4 去处理不同的任务 然后我们还有一些graphic的 一些加速 还有外部的一些接口 那TI在去年年底 今年年初的时候 我们发布了这样的一个参考设计 就是把我们刚才我提到的 SDK 它原本是在PC上的 我们把这个SDK从PC移到了我们刚才提到的Sitara上 就是AM57X系列 那这个有什么好处呢 这个好处就是说 我现在在市场上看到有很多 客人需要去PC化的一个视觉类的设计 大家想一下我刚才说的那个石油管道的东西 那我如果要做扫描 我最终的点云图 是要PC去做 那就是说我的机器上 我后面还要再拖一个PC 或者一个laptop 这个东西在室外的话其实是很suffer的 很容易出问题的 那如果我有一个嵌入式的方式 我有这样的一个公共版 我把所有这部分的东西都放在我的 处理器上面去做 等于说我就是有一个lightcrafter 450的板 再加一个控制板 做到一个很紧凑的设备 我不需要PC 我的设备做的很小型化 同时我可以在我的这个平台再去加一些 比如无线、WiFi、蓝牙、GSM的模块 让它直接可以上到云端 那这样的话 我的整个的在 现场的一个布置 就会比较灵活 我的设备也比较满足我们以后会说的 工业4.0啊 智能制造 这样的一个趋势 那这个就是我们提供的参考设计的一个大概的一个样子 大家可以看到 在右下角这张图 可能比较小一些 这个架子 就是我刚才说的,我们的结构光生成器和camera,工业相机 同时我们会有USB,我们会有 trigger类的一些 GPL,去连到我的572X的一个开发板上 那在这个图以外 我们是没有PC的 我们所有的运算,我们所有的点云的生成 都是在5728上去做的 那关召林这边 如果有机会做产品的话 你就可以打一个板子 把5728 跟我这边的结构光生成器放在一起 那我们以后的基于结构光3D扫描的模块 可能就只有这样的样子 就很小的一个产品 没有PC 这张图是一个分解图 这样的一个参考设计 第一个 包含了我们的lifecrafter 450 和我刚才讲的DLP的结构光生成器 一个相机,工业相机 然后再加我们的一个EBI 那点云图的所有的逻辑 所有的算法都在我们的SDK里,都做好了 放在我们的EBI上 最终点云就可以在这里看到 当然你可以接一个HDMI 把它显示在显示设备上 你也可以去接WiFi 你可以去接GSM 3G、4G让它传到云端 这几个就是比较灵活的一个方式 那当然我们的参考设计是基于TI的DLP比较大 那我们同时在外面会有我们的第三方 像在门口我们的[inaudible]社区 我们的[inaudible]vision 他们就有一个板子 会把我们的 lifecrafter 450 控制的部分 和572X系列 处理器的部分 包括一些[inaudible]无线的一些模块 放在一个板子上 大家一会结束了可以去到那边看一下 也方便大家以后的一个设计 所以从我们的角度做一个summary 我们觉得,我相信很多在座的各位是 第一次接触DLP 尤其是DLP的结构光在工业上的应用 大家可能会觉得DLP是不是用起来很麻烦 里面有很多光学的东西 那我们本地 无论是TI总部还是本地 我们也是做了很多的东西 在简化我们的上手过程 我们把我们的芯片做了模块化的一些设计 所以说 从我们的角度,我们觉得如果您要做一个基于DLP的一个结构光 方案 也很简单 第一 先到我们的ti.com上 去找对应的我们的参考设计 以及我们设计使用到的一些 辅助文档 视频 增进你的了解 第二 根据你被测物体的大小 你想要的精度 分辨率 然后去选择一个合适的TI的EVI 或者是我们第三方的开发板 那这个开发板会集成所有需要测量的光源 镜头 这些所有的辅助器件 你拿来就用 不用管里面的DLP是怎么设计光路的 然后同时如果有问题的话 可以在线包括我们的E2E 有些同事用过 我们会有一些在线支持的网站 去拿到相应的支持 最终根据我们的参考设计 去设计出您这边自己的一个产品出来 所以这个也是从我们的角度 我们觉着也是 比较容易上手 最起码也是比较容易评估这个产品 当然我们的EVI 我们的第三方做的东西是我们现有的产品 就我们现有的能耗搭建出来的一些产品 如果说在做的各位有一些自己的想法 比如我测量的东西 我有一些 有一些独一无二的地方 或者说我的系统设计有些特殊的要求 我们在本地 在上海 在深圳 我们都有我们的工程师团队 包括我们在深圳 在北京 在上海华东地区 都有很多我们第三方的合作伙伴 可以根据您的需要去定制你们的光学设计、镜头设计 包括一些系统的设计 那这些具体的东西 可以下来找我再聊 因为我们今天时间也比较紧 那我最后的话 留一下我的联系方式在这里 我叫Terry Yuan 袁国航 我本身的办公地点 我在上海 但我也会到处跑 那这是我的联系方式 和邮件 欢迎大家后面有问题的话 跟我联系 OK 谢谢大家
那大家知道或者接触过的
DLP产品有什么
OK
这位同事先举手的啊
OK,我们可以给个奖品。
没错
我相信大家都接触过DLP的产品
包括我们今天看到的这个,所用的这个投影机
包括平时大家在跟老婆孩子,跟朋友去电影的时候,电影院里的
这种电影
都是基于DLP的技术去做的
那开始之前的话,我先介绍下我自己
我叫Terry Yuan
袁国航
我是我们DLP中国市场部的市场拓展
我主要负责的是DLP技术在工业汽车
相关领域的一个市场
很高兴今天给大家带来这样的一个讲座
那开始之前呢,我每次都要去讲一下TI的这个DLP的历史。
这个其实我是蛮骄傲的
那为什么呢
DLP技术是TI的一个专利
它的全称英文是digital light processor
数字光处理
那我们是在1987年Larry Hornbeck 博士
发明的这样的一个技术
最早它的确是用在投影机上、
电影院里,
商业投影机,或者我们在办公室里用的这种
看PPT slide用的投影机
那我们也是在
2000年以后,把这样的一个产品在往不同的市场在做拓展
在中国这些年比较火的就是
像奇米啊,坚果啊这种
微投盒子
无屏电视
包括昨天小米发布的一个
E80P的激光电视,买9999的一个150寸的激光电视
那全是基于TI的DLP做的
基于TI的DLP技术
那么,这些只是我们传统的视频显示之类的DLP技术应用
我们用DLP技术再做一些图像的显示
照片的显示
在做人眼的一些视觉
那在2012年以后
我们也在做一些别的市场的推广
在(做)一些拓展
比如说我们把DLP技术带入到了医疗应用领域
工业应用领域 以及汽车应用领域
那同时 我们在15年
凭借DLP技术
给电影行业带来了一个变革
拿到了一个奥斯卡奖
这个就是我们说的那个小金人
TI德州仪器也是唯一一个
半导体厂商
拿过小金人的公司
现在大家如果有机会到我们总部去的话
我们会有一个专门的房间,在把这个小金人放在里面
估计这也是唯一的半导体公司有八卦机会的
那TI的DLP产品
其实我们的产品分布很广
我们主要的是有几个产品类型
那第一个,我们叫DLP的 Display
就是我说的显示,刚才我说过的显示,
无论是我们的微投里的显示
在商业投影机里的显示
还是在电影院里面的显示
那这些都是属于显示类
都是为了显示一些图像、视频
那这个也是大家接触最多的
那其次,就是我们右边有三个新兴的领域
那这三个领域是我们现在看到DLP技术在市场上
增长潜力最大、机会也最多的市场
一个我们叫工业,工业市场
今天我们讲的3D的新视觉就是属于工业的领域
当然它也包括了一些,像3D打印、数字光刻
光路分析这些传统的工业的领域
还有一个就是sensing
那这也是我们DLP最近在一直升级研究的一个领域
它其实是一个传感感知的一个领域
可能大家有些人在网上会看啊,下一代的新的这个iPhone8
据说会有一个3D的摄像头
那它里面做的这个功能就叫做sensing
那我们这个领域其实就是在做类似的事情
那最后一个就是汽车
用我们DLP的这种高亮度
高分辨率、高可塑性的
这个显示方式去做一些车内的抬头显示
增强限时的HOD
包括一些智能大灯
讲了这么多DLP我们的产品
那DLP这个技术它是怎么工作的呢
这个我要讲一下,就是DLP它其实是一个
我们是光的一个调制的芯片
它基本上的架构是,我们在
芯片的底层,在我们的这个DLP的底层
会有一个[Inaudible]的内存单元
然后在上面会覆盖
不同分辨率的小镜子
那每一个小镜子的样子大概是像这样子的
它的大小是在微米级的
从五点几微米到十点几微米
这么大,就这样一个镜子,是这么大,
那我为什么说镜子,包括刚才
后面的那位同事有说过,我们DLP里面的核心器件是叫做
DMD 数字微镜
那这个材质它是金属铝做的
它就像一个小镜子 一样,它可以反射我们的入射光
当我们的光线通过光源部分
照到我这个小镜子的时候
我通过底下的[Inaudible]芯片
去调制镜子的翻转
最终实现了我投影链上对单一像素点的
一个开关
当我把这样的小镜子排布成一个阵列的时候
那我就可以通过这样的翻转
去调制出一个画面
所以我们DLP里的核心器件的名字叫DMD
digital micro-mirror device,数字微镜
它是一个类似于金属像素点的一个阵列
我们通过调制阵列的镜子的翻转
实现了最终图像显示
所以这是一个很精密的设备
一个MAPS设备
我可以给大家看一下一个原型吧
那我手里拿的这样的一个器械
那这个就是DLP系统里的核心器件
叫DMD
大家看到它中心闪闪发光的地方
就是我说的这个金属镜子
那举个例子 在这样的一个,我们叫panel,在这样的一个panel里边
它是一个1080 [Inaudible]的一个分辨率
也就是说在这样的一个分辨率,这么一个大小的区域里面
我们有1920X1080个
这样子的点
所以它是很精密的一个mix
所以在网上啊,或者在我们圈内啊,很多人说
DLP技术 或者DMD其实是TI的一个黑科技
怎么在这么小的一个区域里面
做出这么多的微镜的单元在里面
Ok,那这张共图其实就可以给大家
就是浅显地告诉大家我们DLP系统的工作方式
我们是通过调试微镜
实现光的调制
而且我的光路整个是一个反射系统
是一个投射系统
所以为什么很多朋友说
DLP是什么的时候,就会说DLP是一个
投影设备 它是投影机
那同时
我们在说这个投影的时候
我们讲的都是可见光,这个光线我要投射了,要能看见
但真正对于我们的DMD芯片来说
我其实的能力是能支持到很多的光的波段
我在可见光420到700之间
我可以去进行光的调制
我同时也可以在进紫外的这个
光的波段之内进行调制
更进一步 我可以在一些近红外的
这些波段进行调制
正是因为我们有对于光源的不同支持 我们就可以在
一些类似于工业 特殊的行业领域里面
做出一些非显示的一些功能出来
大家可以看到 这个就是微镜
数字微镜DMD 中间的区域打开以后
它就是这样子的微镜的一个矩阵
每一个矩阵都是几个微米级的
那同时我们可以也是可以支持不同的光源
像灯泡 LED
激光 都可以去支持它
那前面讲的都是我们DLP技术本身
什么是DLP,DLP的核心器件是什么
那现在我进到我们的主题
就是DLP怎么在我的一个3D的
视觉 机器视觉的一个场景里发挥它的作用
那首先讲一下,简单提一下3D 的机器视觉
那在座的各位,有一些朋友是做视觉类的应用
可能最早的时候 从我们的平面视觉
2D的视觉
再现在慢慢地有3D的一些需求
3D视觉
这是因为我们的应用场景,它也在做一些变化
我的一些工厂自动化
我的一些消费类的一些人机互动
需要3D的场景 做一些3D的建模
甚至在一些汽车领域
也都是需要一些3D的这种
图像捕获的能力 或者说
是产生3D模型的能力
去做一个人机互动
那我们现在看到 举个例子 在工业类
我们的3D视觉主要是在哪些行业或者是哪些应用,
会用的比较多呢
比如第一个,就是在产线上做一个定位
做一些抓取,我的机器手臂,我去捡我的物料的时候
我要知道我底下的物料是什么
然后,方便我的机器手臂进行定位
我2D的视觉也可以做,但是我的2D视觉带来的就是说,误差可能会比较大一些
那我需要有3D的信息,需要有[inaudible]
需要有[inaudible]的信息
能更好的识别出我的物料
包括一些检测类应用
比如说,我们有客人在做一些车子漆面的检测
那车子在喷漆完了以后,在研磨以后,它的表面是有一些颗粒
或者说一些气泡。我怎么去把这个东西检测出来
那这个也是视觉类的应用
它是需要3D的。因为2D的信息其实很难去把一些
很细小的瑕疵检测出来
包括一些生物的造影
一些侦测
包括一些现在的这种[inaudible]的游戏啊
包括这些互动的游戏啊
比如我们电影上面经常看到哪个间谍去
去房间进入密室的时候,他需要
把这个人脸的信息扫描出来
去做一个人脸的识别
这些都是三维的机器视觉会应用到的领域
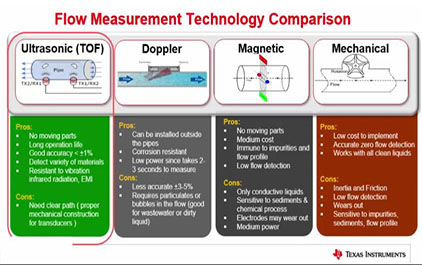
那怎么去做一个三维的机器视觉
那传统的 我们其实是有几种方式
第一种常见的方式 就是我们叫一个
多幕,多幕镜头的方式
一般我们在做二维视觉的时候
我们就是一个摄像机,Camera, 我去
拍摄一张照片,通过纯软件的识别方式
去把整个图片的信息点拿出来,那我如果
在这样的一个系统里面,我再多加一个Camera,
再加一个摄像头,那我其实可以通过
通过软件的方式去识别出物品本身的信息
实现3D的一个视觉构建
那这个可能是我们现在
对于做视觉应用里面最容易上手的,因为它不需要
额外的辅助器件
只需要加一个摄像头软件
那其次我们在产线上
见到比较多的,我们叫一个single line laser scan solution
就是说,我会有一个单数的激光发射器
在我的物体表面进行扫描
通过这样的一个辅助手段
加上一个相机
去拿出Z轴的信息
那还有一个叫做time of flight
就是TOF 刚才我们这边也有同事在问
TOF 那这个也是
这段时间比较火的 TI也有这样的一个solution
它是利用我们的这种,光线反射回来的时间
去计算我的飞行时间
去拿到Z轴的信息
那同时还有一个,我们叫structured light
结构光的方式
顾名思义,它是在我的被测物体表面
去打一些有机构的光的pattern
打一个光的图案上去
通过这样的图案,然后再结合一个相机
去实现最终的一个3D的抓取
当然这是我们现在在市面上看到会比较多的3D
视觉的实现方式
那每一种技术其实是有它自己的优缺点
也有它比较合适应用的一个领域和场景
那么DLP
我们做的是叫结构光的
3D机器视觉
DLP其实就是一个结构光的生成模块
那对于一个结构光来说,它是怎么去实现三维信息的采集呢
其实原理也很简单,它用的是这种
三角测量法去做的
我上面是一个被测物体
被测物体,如果我要截取它的三维信息
它一定是有一些三维的指标
比如它有高低的变化,还有一些
平整度的变化
那我在左侧,在一侧啊,我会有一个
结构光的生成器
去打一些固定的图案
结构光的pattern
那这个pattern打到物体上以后
我会有一个工业相机
同步地去抓取被测物体上整体上的一个画面
我的摄像机,或者说我后面的运算单元
其实我是知道,我打出去的pattern是什么样子
同时我抓取到相机上了以后物体
的pattern是什么样子
我通过比较两张画面之间的pattern的变化
因为光线照到人身上,或者照到物体上
它一定会有变化,因为你有高低,它就一定会有些形变
我的后端就会去比较这两者的形变
去实现最终Z轴信息的抓取
实现我们3D信息的测量
那对于所有的结构光方式
它都是类似于这样的原理
三角测量法去做的
那DLP的产品在一个结构光的产品里面,结构光
测量方式里面,能提供什么样不一样的功能,或者说
它的优势在哪里?首先第一个
就是我们,这个就要提到我们产品跟我们看的微投啊
或者我们看到的投影机区别在哪里了呢
因为我们在投影设备里面,无论是我们的这种
商业投影机,或者电影院
大家知道人眼对于帧率,分辨帧率的快慢
是有一个上限的
理论上,比如我们的电视是24帧
我们的电影院30帧,好一点的60帧
基本上就达到人眼能够分辨的这个上限了
所以说对于视频的应用的投影设备
它的帧率基本上会在60帧以内,这是常见的
但是在机器应用里面
机器视觉里面
相机的抓取速度可以很快
100帧 200帧 甚至高速相机
很多帧,那就决定了说,我的投影设备的
投射帧率也要能跟我的相机同步
所以我的DLP可以在这样的
一个场景里面提供很高的帧率
提供很高的翻转的速度
翻转速度决定了帧率
那我们的工业类的DLP
最快的帧率可以达到32K赫兹
就是一秒钟可以翻32000次
这是一个相当恐怖的数据
也就是说在利用DLP做的结构光生成器里
只要你的后端的摄像头
足够快,你的运算能力足够快
我前端给你的pattern,给你的结构光
就是足够快的
所以可以利用DLP的这个特性
去适应很多场景
我可以做到很快的一个扫描方式
比如在产线上我做in line的inspection,
做In line的检测
因为产线上时间就是钱
我不需要说,像有一些检测设备
可能我流水线到这边,物体过检测的时候要停一下
再走,停一下再走
我可以一直往前
这样的方式去测
然后包括在一些更手持类的扫描测量
或者跟人生物相关的测量里面
我的高帧率就代表了低误差
高精度
这个都是DLP可以提供的
那其次 我们会有一个波长的
的支持范围
我们的波长范围可以从365到2500
这个意思就是说,如果我只用可见光测量
其实我是没有办法覆盖所有的这种
视觉场景
比如说我测量人脸的时候
你用可见光去照,我用白光去照
人眼会刺激的很不舒服
如果,比如说我们的眼睛有一些问题的话
不能见强光,那其实对人眼是损害的
那在这种场景下 我就可以选用支持2500的近红外的DMD,
去用近红外的光去照射
这样的话,人眼其实是看不到的
对人体是没有损伤的
同时我在测一些特殊的物体的时候
比如说我们有一些重金属物体的测试
它其实对于可见光和近红外光的反射,其实反射效率很低
那我们就可以用我们的UV光
紫外线去测
这样就可以达到一个很好的测量效果
那同时 在我们工业用的DLP的
套件里 我们也会提供一些工业测量,工业视觉应用的
一些额外的功能。比如说
我们有一些外部的同步信号
我们可以支持8比特的一个翻转
同时我们的尺寸也可以做的很紧凑
这个都是我们别的这种方式,或者说消费类的投影机
没有办法去实现的
这个地方是从另外一个角度
告诉大家我们的优势在哪里
大家可以看到右边的这些黑白的条纹, 黑白格
它其实就是我刚才讲的pattern
就是我结构光生成器最终打出来的东西
它其实里面的,pattern本身的图案
是不一样的,我们有很多种
我们根据被测物体的大小,被测物体的表面Z轴的特性
包括被测物体的属性
这个图案可以有很多种
那也就是说要求我的结构光生成器
我能够很灵活地去改变我的图案
那现有的机构光生成器可能用的都是一些
固定的图案
或者说它只能改一两副 、两三副的图案
那也就是说我用这样的,现有的结构光生成器做的
3D机器视觉的产品 我可能只能去覆盖一部分的
器件 我不能做到一台设备去测量很多的设备
和器件 但DLP的设备是可以的
因为我们是一个可编程的
然后用数字控制的一个结构光生成器
那这是一个典型的结构光的3D
视觉系统的光图
很简单 可能也比较小
那第一个主要的部分 就是在这个区域
那这也是TI提供的,DLP产品线提供的
结构光生成器
用来投射结构光的产品
那其次在这边会有一个标准的工业相机
那这个工业相机你可以用[inaudible]的
你可以用[inaudible],可以用一些国内的产品
都可以。是一个标准的工业相机 那它们之间
会有一些同步信号和控制信号
最终相机抓取的数据
会到我的后端处理器
无论是PC还是我等会讲的AM572系列
去进行处理,最终
生成3D视觉中的电源图
这是一个典型的系统框图
那同时TI也提供了类似的参考设计
因为我知道,可能对于我们有些客人在使用的时候
还是希望有一些能够很容易上手的东西
所以我们会提供一些参考设计
那这部分的话 大家可以看到这边中间有三个
就是基于DLP结构光生成器的一个三维
机器视觉的一个产品
那它根据我们里面使用的相机的分辨率的大小
刚才我有说到
我们的这个panel是有大小的
首先第一个分辨率它会不一样
其次我中间的panel尺寸也会不一样
这个是现在工业类比较大的,是一个0.95英寸的
那同时我们还会有一些很小的
比如说像这颗
0.45英寸的
分辨率也是WXJA的
那分辨率也是不一样的,那我们同时就是
TI也提供了针对不同分辨率的
3D机器视觉的参考设计
因为我们被检测物体的大小不一样
我们对精度的要求也不一样
大家也可以在TI的这个库里进行选择
那这是我们的一个基于DLP6500
这是我们DLP芯片的型号
基于DLP6500 1080P的3D
扫描的一个参考设计
大家可以看到它大概就是这样的一个样子
这一部分是工业相机
底下是DLP结构光的生产模块
这部分是我的一个接收板
这是测量时候的一个场景
三维扫描时候的一个场景
大家可以看到被测的是一个很复杂的
一个齿轮件,一个结构件
在这个上面的话,会有很多像条纹一样的东西
这个就是pattern
因为我这是一个静态图 不是动态图
所以我讲一下,就是其实这个pattern
会变,会不停地在往上打
然后通过去打这个pattern
然后,我的相机在一侧抓取数据
并运算出最终的电源图
大家可以看到 彩色的就是我们视觉应用
已经抓取到的
数字的点云数据
就是已经被扫描出来的数据
那上面是我们原始的数据
那这一套参考的东西 TI都会提供
在TI官网中都会有
那这样的一个参考设计包含什么
首先第一个 包含了我们的硬件
你需要什么样的硬件
TI提供了基于DLP的结构光生成器
提供了所有的接口
公共版。当然,相机部分,因为TI没有这种工业相机
那我们会推荐几个相机 大家可以去选
那其次 我们包含了系统设计
这个里面就有一些我们怎么去组装
怎么去设计我们的结构件
怎么去做evaluation的一些user guide
包括我们的一些测试的数据
测试的数据
还有我们的系统的框图
还有我们的[inaudible]
这些都可以在TI官网上拿到
那最重要的,刚才我前面讲到的这些东西
都是硬件本身
那对于这样的一个系统的话,软件是很重要的
我相机抓取了以后,我怎么去把它做成电源图,怎么去算
那TI同样也是提供了一个SDK
我们叫lightcrafter SDK
也就是说大家在我们官网上找到这个link
去拿到这些所有硬件
把结构搭起来
去下载我们的SDK 就可以去实现
扫描的功能
3D视觉的功能
那这个就是我要讲的一个核心器件
基于TI DLP4500 lightcrafter
结构光生成器
那大家看到这个东西其实是一个电路板加底下的
一些光学器件
还有一些成像器件
那我刚才说到的DLP的核心器件DMD
就在这个板子里面 看不见,它不像我们
[inaudible]一样 是在表面贴着
它是在这个[inaudible]底下 组装在里面的
因为对于一个DLP系统来说
我们的这个器件制作光路调制
我还需要一些外部的光源
比如LED
我需要透镜 我需要棱镜
我还需要一些结构件来固定
那这部分的东西 我相信对于大家来说
其实是蛮难去搞的
因为毕竟我们是做电子的
那这些光学的东西很难去 - 完全不是一个领域
所以我们TI提供的开发板是
把所有的器件放在里面打包好
大家拿这样一个evalution的Kit
只要去接一个HDMI
或者通过SDI 烧录一些我预制的Pattern
我上电 我就可以去投射这样的一个
pattern出来
去跟你的后棱镜结合
那同时回到SDK
SDK软件的部分我们提供什么
第一就是我们这个驱动,整个平台的驱动
怎么去把我的平台驱动起来
我包含所有控制件的驱动
还有一些接口的驱动
第二 calibration
就是在一个典型的结构光测量系统里面
我有camera 我有projector
我还有一些我的被测物体
那这之间是要做标定的
所有的测量系统都要做标定
那我们在SDK里面也提供了标定的方式
怎么去标定
对于工业相机的支持
我们会预制一些 我印象中现在应该是
灰点的工业相机
那我们也预留一些标准接口
大家可以去调一些自己的工业相机
其次 我的结构光怎么去让它往出打
怎么去调制这些结构光
以及最后 点云图的算法
怎么去把点云图算出来
然后点云图怎么再重建成我的三维模型
这些都是有的
那举两个例子
前面刚才讲了一些我们理论上的应用方式
以及我们的参考设计,那么这样的三维的一个
成像方式 或者说我们的机器视觉
应用在哪些领域呢
这是我们两个客人做的产品
一个是seikowave
是一家美国还是加拿大的公司
它用我们的结构光生成器
DLP的结构光生成器
做了这样的一个器件
它是用来检测什么
它用来检测这个地方
这是一个像一个曲面的一个金属
它其实是用来检测管道的锈迹
就是在欧美,尤其是在俄罗斯或者美国
有很多户外的这种输出管
是在露天的
那输出管是金属的
它一定会发生氧化
会锈,那锈了的话就会裂
或者以后出现漏油的问题
那因为管道很长
我们的客人不可能说时时刻刻派工人在那边去检测
所以它就需要用到视觉的应用
让机器人去做
但对于这种锈迹来说
我们往往是要防患于未然的
就是在它锈之前就要检测问题在哪里
大家知道所有的金属在氧化的时候它会发生
形变
就是我们说生锈了
它会有锈
那这个锈在初期的时候它其实是很小的
可能它的凸起或者它的形变
是几十个微米级的
那这个时候就要用到结构光
去做微米级的检测
他做了这样的一个器件
把它套在管道上 让它实时移动
进行翻转
最终检测出它上面的这个瑕疵
或者锈迹
那这边是我们上海的一家公司
叫carestream
它做的一个齿科类的扫描
那它为什么也要用到结构光呢
就是,如果在座的有一些朋友去看过牙齿
无论是镶牙齿或者是怎么样
你都会有经验 尤其是你要拔下牙齿
他会让你去做咬模
给你一些石膏还是石蜡什么样的东西
让你去咬
咬到了以后 拿出一个模型再去
加工 那这个其实对于我们来说
是很痛苦的一个过程
而且有时候一次咬不准
很难受 那就有这样的一个叫口内的扫描仪
它利用结构光高精度 高速的方式
去直接在你的牙齿上过一圈
我就可以把我牙齿的3D信息直接构建出来
最终送到牙科所去做牙齿的制造
那这两个应用其实都是一个很典型的工业
和一些,比如消费或者行业内的一些三维成像
的一些应用
那在这个地方 其实还有一个DLP结构光很重要的一个优势
我在前面没有讲 就是我们的
高精度
像这样的几十个微米的锈迹
还有牙齿的一些细节
因为大家知道 如果牙齿扫描的不准的话 做出来镶进去
也很很难受 会磨 会怎么样 会抱怨
你可能说这个医院水平太差 手艺活太差
所以 每个人的牙齿也又不一样
所以它对整个的精度要求也是很高的
也是在几十个上百个微米级的
误差范围 所以
这都是DLP的结构光能够带来的优势
就是用DLP的结构光这个模板
我们是可以达到微米级的扫描精度
所以我一说这个微米级的扫描精度
可能有做过视觉类的同事就知道
哦 原来你跟TUF 你跟双目 你跟别的方式
它最大的区别在哪里
那前面我讲的所有东西都是基于DLP
基于DLP结构光的三维视觉应用
那最后我再提一下 因为今天
我们有很多同事介绍了我们TI的
多核一构的处理器
AM57系列,AM Sitara
AM 4几系列
那同时 我们TI
也提供了一套基于这样的多核一构处理器的
嵌入式的3D扫描方案
那这个是我们的多核一构处理器的一个介绍
我就不详细概述了
主要就是我们的性能会比较高
我们的架构会比较领先 我们会有BST
我们有graphic
我们会有多核使用 以后可能有537几
去处理不同的事情 我们的mix很强
那这是我们AM57系列的一个家族图
可以看到其实我们根据不同的型号
会有不同的AM核
刚才的D15,有双核1.5G
有单核 我们有一个C66,DSP
我们有Cortex M4
去处理不同的任务
然后我们还有一些graphic的 一些加速
还有外部的一些接口
那TI在去年年底 今年年初的时候
我们发布了这样的一个参考设计
就是把我们刚才我提到的
SDK 它原本是在PC上的
我们把这个SDK从PC移到了我们刚才提到的Sitara上
就是AM57X系列
那这个有什么好处呢
这个好处就是说 我现在在市场上看到有很多
客人需要去PC化的一个视觉类的设计
大家想一下我刚才说的那个石油管道的东西
那我如果要做扫描 我最终的点云图
是要PC去做
那就是说我的机器上
我后面还要再拖一个PC
或者一个laptop
这个东西在室外的话其实是很suffer的
很容易出问题的
那如果我有一个嵌入式的方式
我有这样的一个公共版
我把所有这部分的东西都放在我的
处理器上面去做
等于说我就是有一个lightcrafter 450的板
再加一个控制板
做到一个很紧凑的设备
我不需要PC
我的设备做的很小型化
同时我可以在我的这个平台再去加一些
比如无线、WiFi、蓝牙、GSM的模块
让它直接可以上到云端
那这样的话 我的整个的在
现场的一个布置
就会比较灵活
我的设备也比较满足我们以后会说的
工业4.0啊 智能制造
这样的一个趋势
那这个就是我们提供的参考设计的一个大概的一个样子
大家可以看到 在右下角这张图
可能比较小一些 这个架子
就是我刚才说的,我们的结构光生成器和camera,工业相机
同时我们会有USB,我们会有 trigger类的一些
GPL,去连到我的572X的一个开发板上
那在这个图以外
我们是没有PC的 我们所有的运算,我们所有的点云的生成
都是在5728上去做的
那关召林这边 如果有机会做产品的话
你就可以打一个板子 把5728
跟我这边的结构光生成器放在一起
那我们以后的基于结构光3D扫描的模块
可能就只有这样的样子
就很小的一个产品
没有PC
这张图是一个分解图
这样的一个参考设计 第一个
包含了我们的lifecrafter 450
和我刚才讲的DLP的结构光生成器
一个相机,工业相机
然后再加我们的一个EBI
那点云图的所有的逻辑
所有的算法都在我们的SDK里,都做好了
放在我们的EBI上
最终点云就可以在这里看到
当然你可以接一个HDMI
把它显示在显示设备上 你也可以去接WiFi
你可以去接GSM
3G、4G让它传到云端
这几个就是比较灵活的一个方式
那当然我们的参考设计是基于TI的DLP比较大
那我们同时在外面会有我们的第三方
像在门口我们的[inaudible]社区
我们的[inaudible]vision
他们就有一个板子 会把我们的
lifecrafter 450 控制的部分
和572X系列
处理器的部分 包括一些[inaudible]无线的一些模块
放在一个板子上
大家一会结束了可以去到那边看一下
也方便大家以后的一个设计
所以从我们的角度做一个summary
我们觉得,我相信很多在座的各位是
第一次接触DLP
尤其是DLP的结构光在工业上的应用
大家可能会觉得DLP是不是用起来很麻烦
里面有很多光学的东西
那我们本地
无论是TI总部还是本地
我们也是做了很多的东西 在简化我们的上手过程
我们把我们的芯片做了模块化的一些设计
所以说 从我们的角度,我们觉得如果您要做一个基于DLP的一个结构光
方案 也很简单
第一 先到我们的ti.com上
去找对应的我们的参考设计
以及我们设计使用到的一些
辅助文档
视频 增进你的了解
第二 根据你被测物体的大小
你想要的精度
分辨率 然后去选择一个合适的TI的EVI
或者是我们第三方的开发板
那这个开发板会集成所有需要测量的光源
镜头 这些所有的辅助器件
你拿来就用 不用管里面的DLP是怎么设计光路的
然后同时如果有问题的话
可以在线包括我们的E2E
有些同事用过
我们会有一些在线支持的网站
去拿到相应的支持
最终根据我们的参考设计
去设计出您这边自己的一个产品出来
所以这个也是从我们的角度 我们觉着也是
比较容易上手 最起码也是比较容易评估这个产品
当然我们的EVI
我们的第三方做的东西是我们现有的产品
就我们现有的能耗搭建出来的一些产品
如果说在做的各位有一些自己的想法
比如我测量的东西 我有一些
有一些独一无二的地方
或者说我的系统设计有些特殊的要求
我们在本地 在上海
在深圳 我们都有我们的工程师团队
包括我们在深圳 在北京
在上海华东地区
都有很多我们第三方的合作伙伴
可以根据您的需要去定制你们的光学设计、镜头设计
包括一些系统的设计
那这些具体的东西
可以下来找我再聊
因为我们今天时间也比较紧
那我最后的话 留一下我的联系方式在这里
我叫Terry Yuan 袁国航
我本身的办公地点 我在上海
但我也会到处跑
那这是我的联系方式
和邮件
欢迎大家后面有问题的话 跟我联系
OK 谢谢大家
那大家知道或者接触过的 DLP产品有什么 OK 这位同事先举手的啊 OK,我们可以给个奖品。 没错 我相信大家都接触过DLP的产品 包括我们今天看到的这个,所用的这个投影机 包括平时大家在跟老婆孩子,跟朋友去电影的时候,电影院里的 这种电影 都是基于DLP的技术去做的 那开始之前的话,我先介绍下我自己 我叫Terry Yuan 袁国航 我是我们DLP中国市场部的市场拓展 我主要负责的是DLP技术在工业汽车 相关领域的一个市场 很高兴今天给大家带来这样的一个讲座 那开始之前呢,我每次都要去讲一下TI的这个DLP的历史。 这个其实我是蛮骄傲的 那为什么呢 DLP技术是TI的一个专利 它的全称英文是digital light processor 数字光处理 那我们是在1987年Larry Hornbeck 博士 发明的这样的一个技术 最早它的确是用在投影机上、 电影院里, 商业投影机,或者我们在办公室里用的这种 看PPT slide用的投影机 那我们也是在 2000年以后,把这样的一个产品在往不同的市场在做拓展 在中国这些年比较火的就是 像奇米啊,坚果啊这种 微投盒子 无屏电视 包括昨天小米发布的一个 E80P的激光电视,买9999的一个150寸的激光电视 那全是基于TI的DLP做的 基于TI的DLP技术 那么,这些只是我们传统的视频显示之类的DLP技术应用 我们用DLP技术再做一些图像的显示 照片的显示 在做人眼的一些视觉 那在2012年以后 我们也在做一些别的市场的推广 在(做)一些拓展 比如说我们把DLP技术带入到了医疗应用领域 工业应用领域 以及汽车应用领域 那同时 我们在15年 凭借DLP技术 给电影行业带来了一个变革 拿到了一个奥斯卡奖 这个就是我们说的那个小金人 TI德州仪器也是唯一一个 半导体厂商 拿过小金人的公司 现在大家如果有机会到我们总部去的话 我们会有一个专门的房间,在把这个小金人放在里面 估计这也是唯一的半导体公司有八卦机会的 那TI的DLP产品 其实我们的产品分布很广 我们主要的是有几个产品类型 那第一个,我们叫DLP的 Display 就是我说的显示,刚才我说过的显示, 无论是我们的微投里的显示 在商业投影机里的显示 还是在电影院里面的显示 那这些都是属于显示类 都是为了显示一些图像、视频 那这个也是大家接触最多的 那其次,就是我们右边有三个新兴的领域 那这三个领域是我们现在看到DLP技术在市场上 增长潜力最大、机会也最多的市场 一个我们叫工业,工业市场 今天我们讲的3D的新视觉就是属于工业的领域 当然它也包括了一些,像3D打印、数字光刻 光路分析这些传统的工业的领域 还有一个就是sensing 那这也是我们DLP最近在一直升级研究的一个领域 它其实是一个传感感知的一个领域 可能大家有些人在网上会看啊,下一代的新的这个iPhone8 据说会有一个3D的摄像头 那它里面做的这个功能就叫做sensing 那我们这个领域其实就是在做类似的事情 那最后一个就是汽车 用我们DLP的这种高亮度 高分辨率、高可塑性的 这个显示方式去做一些车内的抬头显示 增强限时的HOD 包括一些智能大灯 讲了这么多DLP我们的产品 那DLP这个技术它是怎么工作的呢 这个我要讲一下,就是DLP它其实是一个 我们是光的一个调制的芯片 它基本上的架构是,我们在 芯片的底层,在我们的这个DLP的底层 会有一个[Inaudible]的内存单元 然后在上面会覆盖 不同分辨率的小镜子 那每一个小镜子的样子大概是像这样子的 它的大小是在微米级的 从五点几微米到十点几微米 这么大,就这样一个镜子,是这么大, 那我为什么说镜子,包括刚才 后面的那位同事有说过,我们DLP里面的核心器件是叫做 DMD 数字微镜 那这个材质它是金属铝做的 它就像一个小镜子 一样,它可以反射我们的入射光 当我们的光线通过光源部分 照到我这个小镜子的时候 我通过底下的[Inaudible]芯片 去调制镜子的翻转 最终实现了我投影链上对单一像素点的 一个开关 当我把这样的小镜子排布成一个阵列的时候 那我就可以通过这样的翻转 去调制出一个画面 所以我们DLP里的核心器件的名字叫DMD digital micro-mirror device,数字微镜 它是一个类似于金属像素点的一个阵列 我们通过调制阵列的镜子的翻转 实现了最终图像显示 所以这是一个很精密的设备 一个MAPS设备 我可以给大家看一下一个原型吧 那我手里拿的这样的一个器械 那这个就是DLP系统里的核心器件 叫DMD 大家看到它中心闪闪发光的地方 就是我说的这个金属镜子 那举个例子 在这样的一个,我们叫panel,在这样的一个panel里边 它是一个1080 [Inaudible]的一个分辨率 也就是说在这样的一个分辨率,这么一个大小的区域里面 我们有1920X1080个 这样子的点 所以它是很精密的一个mix 所以在网上啊,或者在我们圈内啊,很多人说 DLP技术 或者DMD其实是TI的一个黑科技 怎么在这么小的一个区域里面 做出这么多的微镜的单元在里面 Ok,那这张共图其实就可以给大家 就是浅显地告诉大家我们DLP系统的工作方式 我们是通过调试微镜 实现光的调制 而且我的光路整个是一个反射系统 是一个投射系统 所以为什么很多朋友说 DLP是什么的时候,就会说DLP是一个 投影设备 它是投影机 那同时 我们在说这个投影的时候 我们讲的都是可见光,这个光线我要投射了,要能看见 但真正对于我们的DMD芯片来说 我其实的能力是能支持到很多的光的波段 我在可见光420到700之间 我可以去进行光的调制 我同时也可以在进紫外的这个 光的波段之内进行调制 更进一步 我可以在一些近红外的 这些波段进行调制 正是因为我们有对于光源的不同支持 我们就可以在 一些类似于工业 特殊的行业领域里面 做出一些非显示的一些功能出来 大家可以看到 这个就是微镜 数字微镜DMD 中间的区域打开以后 它就是这样子的微镜的一个矩阵 每一个矩阵都是几个微米级的 那同时我们可以也是可以支持不同的光源 像灯泡 LED 激光 都可以去支持它 那前面讲的都是我们DLP技术本身 什么是DLP,DLP的核心器件是什么 那现在我进到我们的主题 就是DLP怎么在我的一个3D的 视觉 机器视觉的一个场景里发挥它的作用 那首先讲一下,简单提一下3D 的机器视觉 那在座的各位,有一些朋友是做视觉类的应用 可能最早的时候 从我们的平面视觉 2D的视觉 再现在慢慢地有3D的一些需求 3D视觉 这是因为我们的应用场景,它也在做一些变化 我的一些工厂自动化 我的一些消费类的一些人机互动 需要3D的场景 做一些3D的建模 甚至在一些汽车领域 也都是需要一些3D的这种 图像捕获的能力 或者说 是产生3D模型的能力 去做一个人机互动 那我们现在看到 举个例子 在工业类 我们的3D视觉主要是在哪些行业或者是哪些应用, 会用的比较多呢 比如第一个,就是在产线上做一个定位 做一些抓取,我的机器手臂,我去捡我的物料的时候 我要知道我底下的物料是什么 然后,方便我的机器手臂进行定位 我2D的视觉也可以做,但是我的2D视觉带来的就是说,误差可能会比较大一些 那我需要有3D的信息,需要有[inaudible] 需要有[inaudible]的信息 能更好的识别出我的物料 包括一些检测类应用 比如说,我们有客人在做一些车子漆面的检测 那车子在喷漆完了以后,在研磨以后,它的表面是有一些颗粒 或者说一些气泡。我怎么去把这个东西检测出来 那这个也是视觉类的应用 它是需要3D的。因为2D的信息其实很难去把一些 很细小的瑕疵检测出来 包括一些生物的造影 一些侦测 包括一些现在的这种[inaudible]的游戏啊 包括这些互动的游戏啊 比如我们电影上面经常看到哪个间谍去 去房间进入密室的时候,他需要 把这个人脸的信息扫描出来 去做一个人脸的识别 这些都是三维的机器视觉会应用到的领域 那怎么去做一个三维的机器视觉 那传统的 我们其实是有几种方式 第一种常见的方式 就是我们叫一个 多幕,多幕镜头的方式 一般我们在做二维视觉的时候 我们就是一个摄像机,Camera, 我去 拍摄一张照片,通过纯软件的识别方式 去把整个图片的信息点拿出来,那我如果 在这样的一个系统里面,我再多加一个Camera, 再加一个摄像头,那我其实可以通过 通过软件的方式去识别出物品本身的信息 实现3D的一个视觉构建 那这个可能是我们现在 对于做视觉应用里面最容易上手的,因为它不需要 额外的辅助器件 只需要加一个摄像头软件 那其次我们在产线上 见到比较多的,我们叫一个single line laser scan solution 就是说,我会有一个单数的激光发射器 在我的物体表面进行扫描 通过这样的一个辅助手段 加上一个相机 去拿出Z轴的信息 那还有一个叫做time of flight 就是TOF 刚才我们这边也有同事在问 TOF 那这个也是 这段时间比较火的 TI也有这样的一个solution 它是利用我们的这种,光线反射回来的时间 去计算我的飞行时间 去拿到Z轴的信息 那同时还有一个,我们叫structured light 结构光的方式 顾名思义,它是在我的被测物体表面 去打一些有机构的光的pattern 打一个光的图案上去 通过这样的图案,然后再结合一个相机 去实现最终的一个3D的抓取 当然这是我们现在在市面上看到会比较多的3D 视觉的实现方式 那每一种技术其实是有它自己的优缺点 也有它比较合适应用的一个领域和场景 那么DLP 我们做的是叫结构光的 3D机器视觉 DLP其实就是一个结构光的生成模块 那对于一个结构光来说,它是怎么去实现三维信息的采集呢 其实原理也很简单,它用的是这种 三角测量法去做的 我上面是一个被测物体 被测物体,如果我要截取它的三维信息 它一定是有一些三维的指标 比如它有高低的变化,还有一些 平整度的变化 那我在左侧,在一侧啊,我会有一个 结构光的生成器 去打一些固定的图案 结构光的pattern 那这个pattern打到物体上以后 我会有一个工业相机 同步地去抓取被测物体上整体上的一个画面 我的摄像机,或者说我后面的运算单元 其实我是知道,我打出去的pattern是什么样子 同时我抓取到相机上了以后物体 的pattern是什么样子 我通过比较两张画面之间的pattern的变化 因为光线照到人身上,或者照到物体上 它一定会有变化,因为你有高低,它就一定会有些形变 我的后端就会去比较这两者的形变 去实现最终Z轴信息的抓取 实现我们3D信息的测量 那对于所有的结构光方式 它都是类似于这样的原理 三角测量法去做的 那DLP的产品在一个结构光的产品里面,结构光 测量方式里面,能提供什么样不一样的功能,或者说 它的优势在哪里?首先第一个 就是我们,这个就要提到我们产品跟我们看的微投啊 或者我们看到的投影机区别在哪里了呢 因为我们在投影设备里面,无论是我们的这种 商业投影机,或者电影院 大家知道人眼对于帧率,分辨帧率的快慢 是有一个上限的 理论上,比如我们的电视是24帧 我们的电影院30帧,好一点的60帧 基本上就达到人眼能够分辨的这个上限了 所以说对于视频的应用的投影设备 它的帧率基本上会在60帧以内,这是常见的 但是在机器应用里面 机器视觉里面 相机的抓取速度可以很快 100帧 200帧 甚至高速相机 很多帧,那就决定了说,我的投影设备的 投射帧率也要能跟我的相机同步 所以我的DLP可以在这样的 一个场景里面提供很高的帧率 提供很高的翻转的速度 翻转速度决定了帧率 那我们的工业类的DLP 最快的帧率可以达到32K赫兹 就是一秒钟可以翻32000次 这是一个相当恐怖的数据 也就是说在利用DLP做的结构光生成器里 只要你的后端的摄像头 足够快,你的运算能力足够快 我前端给你的pattern,给你的结构光 就是足够快的 所以可以利用DLP的这个特性 去适应很多场景 我可以做到很快的一个扫描方式 比如在产线上我做in line的inspection, 做In line的检测 因为产线上时间就是钱 我不需要说,像有一些检测设备 可能我流水线到这边,物体过检测的时候要停一下 再走,停一下再走 我可以一直往前 这样的方式去测 然后包括在一些更手持类的扫描测量 或者跟人生物相关的测量里面 我的高帧率就代表了低误差 高精度 这个都是DLP可以提供的 那其次 我们会有一个波长的 的支持范围 我们的波长范围可以从365到2500 这个意思就是说,如果我只用可见光测量 其实我是没有办法覆盖所有的这种 视觉场景 比如说我测量人脸的时候 你用可见光去照,我用白光去照 人眼会刺激的很不舒服 如果,比如说我们的眼睛有一些问题的话 不能见强光,那其实对人眼是损害的 那在这种场景下 我就可以选用支持2500的近红外的DMD, 去用近红外的光去照射 这样的话,人眼其实是看不到的 对人体是没有损伤的 同时我在测一些特殊的物体的时候 比如说我们有一些重金属物体的测试 它其实对于可见光和近红外光的反射,其实反射效率很低 那我们就可以用我们的UV光 紫外线去测 这样就可以达到一个很好的测量效果 那同时 在我们工业用的DLP的 套件里 我们也会提供一些工业测量,工业视觉应用的 一些额外的功能。比如说 我们有一些外部的同步信号 我们可以支持8比特的一个翻转 同时我们的尺寸也可以做的很紧凑 这个都是我们别的这种方式,或者说消费类的投影机 没有办法去实现的 这个地方是从另外一个角度 告诉大家我们的优势在哪里 大家可以看到右边的这些黑白的条纹, 黑白格 它其实就是我刚才讲的pattern 就是我结构光生成器最终打出来的东西 它其实里面的,pattern本身的图案 是不一样的,我们有很多种 我们根据被测物体的大小,被测物体的表面Z轴的特性 包括被测物体的属性 这个图案可以有很多种 那也就是说要求我的结构光生成器 我能够很灵活地去改变我的图案 那现有的机构光生成器可能用的都是一些 固定的图案 或者说它只能改一两副 、两三副的图案 那也就是说我用这样的,现有的结构光生成器做的 3D机器视觉的产品 我可能只能去覆盖一部分的 器件 我不能做到一台设备去测量很多的设备 和器件 但DLP的设备是可以的 因为我们是一个可编程的 然后用数字控制的一个结构光生成器 那这是一个典型的结构光的3D 视觉系统的光图 很简单 可能也比较小 那第一个主要的部分 就是在这个区域 那这也是TI提供的,DLP产品线提供的 结构光生成器 用来投射结构光的产品 那其次在这边会有一个标准的工业相机 那这个工业相机你可以用[inaudible]的 你可以用[inaudible],可以用一些国内的产品 都可以。是一个标准的工业相机 那它们之间 会有一些同步信号和控制信号 最终相机抓取的数据 会到我的后端处理器 无论是PC还是我等会讲的AM572系列 去进行处理,最终 生成3D视觉中的电源图 这是一个典型的系统框图 那同时TI也提供了类似的参考设计 因为我知道,可能对于我们有些客人在使用的时候 还是希望有一些能够很容易上手的东西 所以我们会提供一些参考设计 那这部分的话 大家可以看到这边中间有三个 就是基于DLP结构光生成器的一个三维 机器视觉的一个产品 那它根据我们里面使用的相机的分辨率的大小 刚才我有说到 我们的这个panel是有大小的 首先第一个分辨率它会不一样 其次我中间的panel尺寸也会不一样 这个是现在工业类比较大的,是一个0.95英寸的 那同时我们还会有一些很小的 比如说像这颗 0.45英寸的 分辨率也是WXJA的 那分辨率也是不一样的,那我们同时就是 TI也提供了针对不同分辨率的 3D机器视觉的参考设计 因为我们被检测物体的大小不一样 我们对精度的要求也不一样 大家也可以在TI的这个库里进行选择 那这是我们的一个基于DLP6500 这是我们DLP芯片的型号 基于DLP6500 1080P的3D 扫描的一个参考设计 大家可以看到它大概就是这样的一个样子 这一部分是工业相机 底下是DLP结构光的生产模块 这部分是我的一个接收板 这是测量时候的一个场景 三维扫描时候的一个场景 大家可以看到被测的是一个很复杂的 一个齿轮件,一个结构件 在这个上面的话,会有很多像条纹一样的东西 这个就是pattern 因为我这是一个静态图 不是动态图 所以我讲一下,就是其实这个pattern 会变,会不停地在往上打 然后通过去打这个pattern 然后,我的相机在一侧抓取数据 并运算出最终的电源图 大家可以看到 彩色的就是我们视觉应用 已经抓取到的 数字的点云数据 就是已经被扫描出来的数据 那上面是我们原始的数据 那这一套参考的东西 TI都会提供 在TI官网中都会有 那这样的一个参考设计包含什么 首先第一个 包含了我们的硬件 你需要什么样的硬件 TI提供了基于DLP的结构光生成器 提供了所有的接口 公共版。当然,相机部分,因为TI没有这种工业相机 那我们会推荐几个相机 大家可以去选 那其次 我们包含了系统设计 这个里面就有一些我们怎么去组装 怎么去设计我们的结构件 怎么去做evaluation的一些user guide 包括我们的一些测试的数据 测试的数据 还有我们的系统的框图 还有我们的[inaudible] 这些都可以在TI官网上拿到 那最重要的,刚才我前面讲到的这些东西 都是硬件本身 那对于这样的一个系统的话,软件是很重要的 我相机抓取了以后,我怎么去把它做成电源图,怎么去算 那TI同样也是提供了一个SDK 我们叫lightcrafter SDK 也就是说大家在我们官网上找到这个link 去拿到这些所有硬件 把结构搭起来 去下载我们的SDK 就可以去实现 扫描的功能 3D视觉的功能 那这个就是我要讲的一个核心器件 基于TI DLP4500 lightcrafter 结构光生成器 那大家看到这个东西其实是一个电路板加底下的 一些光学器件 还有一些成像器件 那我刚才说到的DLP的核心器件DMD 就在这个板子里面 看不见,它不像我们 [inaudible]一样 是在表面贴着 它是在这个[inaudible]底下 组装在里面的 因为对于一个DLP系统来说 我们的这个器件制作光路调制 我还需要一些外部的光源 比如LED 我需要透镜 我需要棱镜 我还需要一些结构件来固定 那这部分的东西 我相信对于大家来说 其实是蛮难去搞的 因为毕竟我们是做电子的 那这些光学的东西很难去 - 完全不是一个领域 所以我们TI提供的开发板是 把所有的器件放在里面打包好 大家拿这样一个evalution的Kit 只要去接一个HDMI 或者通过SDI 烧录一些我预制的Pattern 我上电 我就可以去投射这样的一个 pattern出来 去跟你的后棱镜结合 那同时回到SDK SDK软件的部分我们提供什么 第一就是我们这个驱动,整个平台的驱动 怎么去把我的平台驱动起来 我包含所有控制件的驱动 还有一些接口的驱动 第二 calibration 就是在一个典型的结构光测量系统里面 我有camera 我有projector 我还有一些我的被测物体 那这之间是要做标定的 所有的测量系统都要做标定 那我们在SDK里面也提供了标定的方式 怎么去标定 对于工业相机的支持 我们会预制一些 我印象中现在应该是 灰点的工业相机 那我们也预留一些标准接口 大家可以去调一些自己的工业相机 其次 我的结构光怎么去让它往出打 怎么去调制这些结构光 以及最后 点云图的算法 怎么去把点云图算出来 然后点云图怎么再重建成我的三维模型 这些都是有的 那举两个例子 前面刚才讲了一些我们理论上的应用方式 以及我们的参考设计,那么这样的三维的一个 成像方式 或者说我们的机器视觉 应用在哪些领域呢 这是我们两个客人做的产品 一个是seikowave 是一家美国还是加拿大的公司 它用我们的结构光生成器 DLP的结构光生成器 做了这样的一个器件 它是用来检测什么 它用来检测这个地方 这是一个像一个曲面的一个金属 它其实是用来检测管道的锈迹 就是在欧美,尤其是在俄罗斯或者美国 有很多户外的这种输出管 是在露天的 那输出管是金属的 它一定会发生氧化 会锈,那锈了的话就会裂 或者以后出现漏油的问题 那因为管道很长 我们的客人不可能说时时刻刻派工人在那边去检测 所以它就需要用到视觉的应用 让机器人去做 但对于这种锈迹来说 我们往往是要防患于未然的 就是在它锈之前就要检测问题在哪里 大家知道所有的金属在氧化的时候它会发生 形变 就是我们说生锈了 它会有锈 那这个锈在初期的时候它其实是很小的 可能它的凸起或者它的形变 是几十个微米级的 那这个时候就要用到结构光 去做微米级的检测 他做了这样的一个器件 把它套在管道上 让它实时移动 进行翻转 最终检测出它上面的这个瑕疵 或者锈迹 那这边是我们上海的一家公司 叫carestream 它做的一个齿科类的扫描 那它为什么也要用到结构光呢 就是,如果在座的有一些朋友去看过牙齿 无论是镶牙齿或者是怎么样 你都会有经验 尤其是你要拔下牙齿 他会让你去做咬模 给你一些石膏还是石蜡什么样的东西 让你去咬 咬到了以后 拿出一个模型再去 加工 那这个其实对于我们来说 是很痛苦的一个过程 而且有时候一次咬不准 很难受 那就有这样的一个叫口内的扫描仪 它利用结构光高精度 高速的方式 去直接在你的牙齿上过一圈 我就可以把我牙齿的3D信息直接构建出来 最终送到牙科所去做牙齿的制造 那这两个应用其实都是一个很典型的工业 和一些,比如消费或者行业内的一些三维成像 的一些应用 那在这个地方 其实还有一个DLP结构光很重要的一个优势 我在前面没有讲 就是我们的 高精度 像这样的几十个微米的锈迹 还有牙齿的一些细节 因为大家知道 如果牙齿扫描的不准的话 做出来镶进去 也很很难受 会磨 会怎么样 会抱怨 你可能说这个医院水平太差 手艺活太差 所以 每个人的牙齿也又不一样 所以它对整个的精度要求也是很高的 也是在几十个上百个微米级的 误差范围 所以 这都是DLP的结构光能够带来的优势 就是用DLP的结构光这个模板 我们是可以达到微米级的扫描精度 所以我一说这个微米级的扫描精度 可能有做过视觉类的同事就知道 哦 原来你跟TUF 你跟双目 你跟别的方式 它最大的区别在哪里 那前面我讲的所有东西都是基于DLP 基于DLP结构光的三维视觉应用 那最后我再提一下 因为今天 我们有很多同事介绍了我们TI的 多核一构的处理器 AM57系列,AM Sitara AM 4几系列 那同时 我们TI 也提供了一套基于这样的多核一构处理器的 嵌入式的3D扫描方案 那这个是我们的多核一构处理器的一个介绍 我就不详细概述了 主要就是我们的性能会比较高 我们的架构会比较领先 我们会有BST 我们有graphic 我们会有多核使用 以后可能有537几 去处理不同的事情 我们的mix很强 那这是我们AM57系列的一个家族图 可以看到其实我们根据不同的型号 会有不同的AM核 刚才的D15,有双核1.5G 有单核 我们有一个C66,DSP 我们有Cortex M4 去处理不同的任务 然后我们还有一些graphic的 一些加速 还有外部的一些接口 那TI在去年年底 今年年初的时候 我们发布了这样的一个参考设计 就是把我们刚才我提到的 SDK 它原本是在PC上的 我们把这个SDK从PC移到了我们刚才提到的Sitara上 就是AM57X系列 那这个有什么好处呢 这个好处就是说 我现在在市场上看到有很多 客人需要去PC化的一个视觉类的设计 大家想一下我刚才说的那个石油管道的东西 那我如果要做扫描 我最终的点云图 是要PC去做 那就是说我的机器上 我后面还要再拖一个PC 或者一个laptop 这个东西在室外的话其实是很suffer的 很容易出问题的 那如果我有一个嵌入式的方式 我有这样的一个公共版 我把所有这部分的东西都放在我的 处理器上面去做 等于说我就是有一个lightcrafter 450的板 再加一个控制板 做到一个很紧凑的设备 我不需要PC 我的设备做的很小型化 同时我可以在我的这个平台再去加一些 比如无线、WiFi、蓝牙、GSM的模块 让它直接可以上到云端 那这样的话 我的整个的在 现场的一个布置 就会比较灵活 我的设备也比较满足我们以后会说的 工业4.0啊 智能制造 这样的一个趋势 那这个就是我们提供的参考设计的一个大概的一个样子 大家可以看到 在右下角这张图 可能比较小一些 这个架子 就是我刚才说的,我们的结构光生成器和camera,工业相机 同时我们会有USB,我们会有 trigger类的一些 GPL,去连到我的572X的一个开发板上 那在这个图以外 我们是没有PC的 我们所有的运算,我们所有的点云的生成 都是在5728上去做的 那关召林这边 如果有机会做产品的话 你就可以打一个板子 把5728 跟我这边的结构光生成器放在一起 那我们以后的基于结构光3D扫描的模块 可能就只有这样的样子 就很小的一个产品 没有PC 这张图是一个分解图 这样的一个参考设计 第一个 包含了我们的lifecrafter 450 和我刚才讲的DLP的结构光生成器 一个相机,工业相机 然后再加我们的一个EBI 那点云图的所有的逻辑 所有的算法都在我们的SDK里,都做好了 放在我们的EBI上 最终点云就可以在这里看到 当然你可以接一个HDMI 把它显示在显示设备上 你也可以去接WiFi 你可以去接GSM 3G、4G让它传到云端 这几个就是比较灵活的一个方式 那当然我们的参考设计是基于TI的DLP比较大 那我们同时在外面会有我们的第三方 像在门口我们的[inaudible]社区 我们的[inaudible]vision 他们就有一个板子 会把我们的 lifecrafter 450 控制的部分 和572X系列 处理器的部分 包括一些[inaudible]无线的一些模块 放在一个板子上 大家一会结束了可以去到那边看一下 也方便大家以后的一个设计 所以从我们的角度做一个summary 我们觉得,我相信很多在座的各位是 第一次接触DLP 尤其是DLP的结构光在工业上的应用 大家可能会觉得DLP是不是用起来很麻烦 里面有很多光学的东西 那我们本地 无论是TI总部还是本地 我们也是做了很多的东西 在简化我们的上手过程 我们把我们的芯片做了模块化的一些设计 所以说 从我们的角度,我们觉得如果您要做一个基于DLP的一个结构光 方案 也很简单 第一 先到我们的ti.com上 去找对应的我们的参考设计 以及我们设计使用到的一些 辅助文档 视频 增进你的了解 第二 根据你被测物体的大小 你想要的精度 分辨率 然后去选择一个合适的TI的EVI 或者是我们第三方的开发板 那这个开发板会集成所有需要测量的光源 镜头 这些所有的辅助器件 你拿来就用 不用管里面的DLP是怎么设计光路的 然后同时如果有问题的话 可以在线包括我们的E2E 有些同事用过 我们会有一些在线支持的网站 去拿到相应的支持 最终根据我们的参考设计 去设计出您这边自己的一个产品出来 所以这个也是从我们的角度 我们觉着也是 比较容易上手 最起码也是比较容易评估这个产品 当然我们的EVI 我们的第三方做的东西是我们现有的产品 就我们现有的能耗搭建出来的一些产品 如果说在做的各位有一些自己的想法 比如我测量的东西 我有一些 有一些独一无二的地方 或者说我的系统设计有些特殊的要求 我们在本地 在上海 在深圳 我们都有我们的工程师团队 包括我们在深圳 在北京 在上海华东地区 都有很多我们第三方的合作伙伴 可以根据您的需要去定制你们的光学设计、镜头设计 包括一些系统的设计 那这些具体的东西 可以下来找我再聊 因为我们今天时间也比较紧 那我最后的话 留一下我的联系方式在这里 我叫Terry Yuan 袁国航 我本身的办公地点 我在上海 但我也会到处跑 那这是我的联系方式 和邮件 欢迎大家后面有问题的话 跟我联系 OK 谢谢大家
那大家知道或者接触过的
DLP产品有什么
OK
这位同事先举手的啊
OK,我们可以给个奖品。
没错
我相信大家都接触过DLP的产品
包括我们今天看到的这个,所用的这个投影机
包括平时大家在跟老婆孩子,跟朋友去电影的时候,电影院里的
这种电影
都是基于DLP的技术去做的
那开始之前的话,我先介绍下我自己
我叫Terry Yuan
袁国航
我是我们DLP中国市场部的市场拓展
我主要负责的是DLP技术在工业汽车
相关领域的一个市场
很高兴今天给大家带来这样的一个讲座
那开始之前呢,我每次都要去讲一下TI的这个DLP的历史。
这个其实我是蛮骄傲的
那为什么呢
DLP技术是TI的一个专利
它的全称英文是digital light processor
数字光处理
那我们是在1987年Larry Hornbeck 博士
发明的这样的一个技术
最早它的确是用在投影机上、
电影院里,
商业投影机,或者我们在办公室里用的这种
看PPT slide用的投影机
那我们也是在
2000年以后,把这样的一个产品在往不同的市场在做拓展
在中国这些年比较火的就是
像奇米啊,坚果啊这种
微投盒子
无屏电视
包括昨天小米发布的一个
E80P的激光电视,买9999的一个150寸的激光电视
那全是基于TI的DLP做的
基于TI的DLP技术
那么,这些只是我们传统的视频显示之类的DLP技术应用
我们用DLP技术再做一些图像的显示
照片的显示
在做人眼的一些视觉
那在2012年以后
我们也在做一些别的市场的推广
在(做)一些拓展
比如说我们把DLP技术带入到了医疗应用领域
工业应用领域 以及汽车应用领域
那同时 我们在15年
凭借DLP技术
给电影行业带来了一个变革
拿到了一个奥斯卡奖
这个就是我们说的那个小金人
TI德州仪器也是唯一一个
半导体厂商
拿过小金人的公司
现在大家如果有机会到我们总部去的话
我们会有一个专门的房间,在把这个小金人放在里面
估计这也是唯一的半导体公司有八卦机会的
那TI的DLP产品
其实我们的产品分布很广
我们主要的是有几个产品类型
那第一个,我们叫DLP的 Display
就是我说的显示,刚才我说过的显示,
无论是我们的微投里的显示
在商业投影机里的显示
还是在电影院里面的显示
那这些都是属于显示类
都是为了显示一些图像、视频
那这个也是大家接触最多的
那其次,就是我们右边有三个新兴的领域
那这三个领域是我们现在看到DLP技术在市场上
增长潜力最大、机会也最多的市场
一个我们叫工业,工业市场
今天我们讲的3D的新视觉就是属于工业的领域
当然它也包括了一些,像3D打印、数字光刻
光路分析这些传统的工业的领域
还有一个就是sensing
那这也是我们DLP最近在一直升级研究的一个领域
它其实是一个传感感知的一个领域
可能大家有些人在网上会看啊,下一代的新的这个iPhone8
据说会有一个3D的摄像头
那它里面做的这个功能就叫做sensing
那我们这个领域其实就是在做类似的事情
那最后一个就是汽车
用我们DLP的这种高亮度
高分辨率、高可塑性的
这个显示方式去做一些车内的抬头显示
增强限时的HOD
包括一些智能大灯
讲了这么多DLP我们的产品
那DLP这个技术它是怎么工作的呢
这个我要讲一下,就是DLP它其实是一个
我们是光的一个调制的芯片
它基本上的架构是,我们在
芯片的底层,在我们的这个DLP的底层
会有一个[Inaudible]的内存单元
然后在上面会覆盖
不同分辨率的小镜子
那每一个小镜子的样子大概是像这样子的
它的大小是在微米级的
从五点几微米到十点几微米
这么大,就这样一个镜子,是这么大,
那我为什么说镜子,包括刚才
后面的那位同事有说过,我们DLP里面的核心器件是叫做
DMD 数字微镜
那这个材质它是金属铝做的
它就像一个小镜子 一样,它可以反射我们的入射光
当我们的光线通过光源部分
照到我这个小镜子的时候
我通过底下的[Inaudible]芯片
去调制镜子的翻转
最终实现了我投影链上对单一像素点的
一个开关
当我把这样的小镜子排布成一个阵列的时候
那我就可以通过这样的翻转
去调制出一个画面
所以我们DLP里的核心器件的名字叫DMD
digital micro-mirror device,数字微镜
它是一个类似于金属像素点的一个阵列
我们通过调制阵列的镜子的翻转
实现了最终图像显示
所以这是一个很精密的设备
一个MAPS设备
我可以给大家看一下一个原型吧
那我手里拿的这样的一个器械
那这个就是DLP系统里的核心器件
叫DMD
大家看到它中心闪闪发光的地方
就是我说的这个金属镜子
那举个例子 在这样的一个,我们叫panel,在这样的一个panel里边
它是一个1080 [Inaudible]的一个分辨率
也就是说在这样的一个分辨率,这么一个大小的区域里面
我们有1920X1080个
这样子的点
所以它是很精密的一个mix
所以在网上啊,或者在我们圈内啊,很多人说
DLP技术 或者DMD其实是TI的一个黑科技
怎么在这么小的一个区域里面
做出这么多的微镜的单元在里面
Ok,那这张共图其实就可以给大家
就是浅显地告诉大家我们DLP系统的工作方式
我们是通过调试微镜
实现光的调制
而且我的光路整个是一个反射系统
是一个投射系统
所以为什么很多朋友说
DLP是什么的时候,就会说DLP是一个
投影设备 它是投影机
那同时
我们在说这个投影的时候
我们讲的都是可见光,这个光线我要投射了,要能看见
但真正对于我们的DMD芯片来说
我其实的能力是能支持到很多的光的波段
我在可见光420到700之间
我可以去进行光的调制
我同时也可以在进紫外的这个
光的波段之内进行调制
更进一步 我可以在一些近红外的
这些波段进行调制
正是因为我们有对于光源的不同支持 我们就可以在
一些类似于工业 特殊的行业领域里面
做出一些非显示的一些功能出来
大家可以看到 这个就是微镜
数字微镜DMD 中间的区域打开以后
它就是这样子的微镜的一个矩阵
每一个矩阵都是几个微米级的
那同时我们可以也是可以支持不同的光源
像灯泡 LED
激光 都可以去支持它
那前面讲的都是我们DLP技术本身
什么是DLP,DLP的核心器件是什么
那现在我进到我们的主题
就是DLP怎么在我的一个3D的
视觉 机器视觉的一个场景里发挥它的作用
那首先讲一下,简单提一下3D 的机器视觉
那在座的各位,有一些朋友是做视觉类的应用
可能最早的时候 从我们的平面视觉
2D的视觉
再现在慢慢地有3D的一些需求
3D视觉
这是因为我们的应用场景,它也在做一些变化
我的一些工厂自动化
我的一些消费类的一些人机互动
需要3D的场景 做一些3D的建模
甚至在一些汽车领域
也都是需要一些3D的这种
图像捕获的能力 或者说
是产生3D模型的能力
去做一个人机互动
那我们现在看到 举个例子 在工业类
我们的3D视觉主要是在哪些行业或者是哪些应用,
会用的比较多呢
比如第一个,就是在产线上做一个定位
做一些抓取,我的机器手臂,我去捡我的物料的时候
我要知道我底下的物料是什么
然后,方便我的机器手臂进行定位
我2D的视觉也可以做,但是我的2D视觉带来的就是说,误差可能会比较大一些
那我需要有3D的信息,需要有[inaudible]
需要有[inaudible]的信息
能更好的识别出我的物料
包括一些检测类应用
比如说,我们有客人在做一些车子漆面的检测
那车子在喷漆完了以后,在研磨以后,它的表面是有一些颗粒
或者说一些气泡。我怎么去把这个东西检测出来
那这个也是视觉类的应用
它是需要3D的。因为2D的信息其实很难去把一些
很细小的瑕疵检测出来
包括一些生物的造影
一些侦测
包括一些现在的这种[inaudible]的游戏啊
包括这些互动的游戏啊
比如我们电影上面经常看到哪个间谍去
去房间进入密室的时候,他需要
把这个人脸的信息扫描出来
去做一个人脸的识别
这些都是三维的机器视觉会应用到的领域
那怎么去做一个三维的机器视觉
那传统的 我们其实是有几种方式
第一种常见的方式 就是我们叫一个
多幕,多幕镜头的方式
一般我们在做二维视觉的时候
我们就是一个摄像机,Camera, 我去
拍摄一张照片,通过纯软件的识别方式
去把整个图片的信息点拿出来,那我如果
在这样的一个系统里面,我再多加一个Camera,
再加一个摄像头,那我其实可以通过
通过软件的方式去识别出物品本身的信息
实现3D的一个视觉构建
那这个可能是我们现在
对于做视觉应用里面最容易上手的,因为它不需要
额外的辅助器件
只需要加一个摄像头软件
那其次我们在产线上
见到比较多的,我们叫一个single line laser scan solution
就是说,我会有一个单数的激光发射器
在我的物体表面进行扫描
通过这样的一个辅助手段
加上一个相机
去拿出Z轴的信息
那还有一个叫做time of flight
就是TOF 刚才我们这边也有同事在问
TOF 那这个也是
这段时间比较火的 TI也有这样的一个solution
它是利用我们的这种,光线反射回来的时间
去计算我的飞行时间
去拿到Z轴的信息
那同时还有一个,我们叫structured light
结构光的方式
顾名思义,它是在我的被测物体表面
去打一些有机构的光的pattern
打一个光的图案上去
通过这样的图案,然后再结合一个相机
去实现最终的一个3D的抓取
当然这是我们现在在市面上看到会比较多的3D
视觉的实现方式
那每一种技术其实是有它自己的优缺点
也有它比较合适应用的一个领域和场景
那么DLP
我们做的是叫结构光的
3D机器视觉
DLP其实就是一个结构光的生成模块
那对于一个结构光来说,它是怎么去实现三维信息的采集呢
其实原理也很简单,它用的是这种
三角测量法去做的
我上面是一个被测物体
被测物体,如果我要截取它的三维信息
它一定是有一些三维的指标
比如它有高低的变化,还有一些
平整度的变化
那我在左侧,在一侧啊,我会有一个
结构光的生成器
去打一些固定的图案
结构光的pattern
那这个pattern打到物体上以后
我会有一个工业相机
同步地去抓取被测物体上整体上的一个画面
我的摄像机,或者说我后面的运算单元
其实我是知道,我打出去的pattern是什么样子
同时我抓取到相机上了以后物体
的pattern是什么样子
我通过比较两张画面之间的pattern的变化
因为光线照到人身上,或者照到物体上
它一定会有变化,因为你有高低,它就一定会有些形变
我的后端就会去比较这两者的形变
去实现最终Z轴信息的抓取
实现我们3D信息的测量
那对于所有的结构光方式
它都是类似于这样的原理
三角测量法去做的
那DLP的产品在一个结构光的产品里面,结构光
测量方式里面,能提供什么样不一样的功能,或者说
它的优势在哪里?首先第一个
就是我们,这个就要提到我们产品跟我们看的微投啊
或者我们看到的投影机区别在哪里了呢
因为我们在投影设备里面,无论是我们的这种
商业投影机,或者电影院
大家知道人眼对于帧率,分辨帧率的快慢
是有一个上限的
理论上,比如我们的电视是24帧
我们的电影院30帧,好一点的60帧
基本上就达到人眼能够分辨的这个上限了
所以说对于视频的应用的投影设备
它的帧率基本上会在60帧以内,这是常见的
但是在机器应用里面
机器视觉里面
相机的抓取速度可以很快
100帧 200帧 甚至高速相机
很多帧,那就决定了说,我的投影设备的
投射帧率也要能跟我的相机同步
所以我的DLP可以在这样的
一个场景里面提供很高的帧率
提供很高的翻转的速度
翻转速度决定了帧率
那我们的工业类的DLP
最快的帧率可以达到32K赫兹
就是一秒钟可以翻32000次
这是一个相当恐怖的数据
也就是说在利用DLP做的结构光生成器里
只要你的后端的摄像头
足够快,你的运算能力足够快
我前端给你的pattern,给你的结构光
就是足够快的
所以可以利用DLP的这个特性
去适应很多场景
我可以做到很快的一个扫描方式
比如在产线上我做in line的inspection,
做In line的检测
因为产线上时间就是钱
我不需要说,像有一些检测设备
可能我流水线到这边,物体过检测的时候要停一下
再走,停一下再走
我可以一直往前
这样的方式去测
然后包括在一些更手持类的扫描测量
或者跟人生物相关的测量里面
我的高帧率就代表了低误差
高精度
这个都是DLP可以提供的
那其次 我们会有一个波长的
的支持范围
我们的波长范围可以从365到2500
这个意思就是说,如果我只用可见光测量
其实我是没有办法覆盖所有的这种
视觉场景
比如说我测量人脸的时候
你用可见光去照,我用白光去照
人眼会刺激的很不舒服
如果,比如说我们的眼睛有一些问题的话
不能见强光,那其实对人眼是损害的
那在这种场景下 我就可以选用支持2500的近红外的DMD,
去用近红外的光去照射
这样的话,人眼其实是看不到的
对人体是没有损伤的
同时我在测一些特殊的物体的时候
比如说我们有一些重金属物体的测试
它其实对于可见光和近红外光的反射,其实反射效率很低
那我们就可以用我们的UV光
紫外线去测
这样就可以达到一个很好的测量效果
那同时 在我们工业用的DLP的
套件里 我们也会提供一些工业测量,工业视觉应用的
一些额外的功能。比如说
我们有一些外部的同步信号
我们可以支持8比特的一个翻转
同时我们的尺寸也可以做的很紧凑
这个都是我们别的这种方式,或者说消费类的投影机
没有办法去实现的
这个地方是从另外一个角度
告诉大家我们的优势在哪里
大家可以看到右边的这些黑白的条纹, 黑白格
它其实就是我刚才讲的pattern
就是我结构光生成器最终打出来的东西
它其实里面的,pattern本身的图案
是不一样的,我们有很多种
我们根据被测物体的大小,被测物体的表面Z轴的特性
包括被测物体的属性
这个图案可以有很多种
那也就是说要求我的结构光生成器
我能够很灵活地去改变我的图案
那现有的机构光生成器可能用的都是一些
固定的图案
或者说它只能改一两副 、两三副的图案
那也就是说我用这样的,现有的结构光生成器做的
3D机器视觉的产品 我可能只能去覆盖一部分的
器件 我不能做到一台设备去测量很多的设备
和器件 但DLP的设备是可以的
因为我们是一个可编程的
然后用数字控制的一个结构光生成器
那这是一个典型的结构光的3D
视觉系统的光图
很简单 可能也比较小
那第一个主要的部分 就是在这个区域
那这也是TI提供的,DLP产品线提供的
结构光生成器
用来投射结构光的产品
那其次在这边会有一个标准的工业相机
那这个工业相机你可以用[inaudible]的
你可以用[inaudible],可以用一些国内的产品
都可以。是一个标准的工业相机 那它们之间
会有一些同步信号和控制信号
最终相机抓取的数据
会到我的后端处理器
无论是PC还是我等会讲的AM572系列
去进行处理,最终
生成3D视觉中的电源图
这是一个典型的系统框图
那同时TI也提供了类似的参考设计
因为我知道,可能对于我们有些客人在使用的时候
还是希望有一些能够很容易上手的东西
所以我们会提供一些参考设计
那这部分的话 大家可以看到这边中间有三个
就是基于DLP结构光生成器的一个三维
机器视觉的一个产品
那它根据我们里面使用的相机的分辨率的大小
刚才我有说到
我们的这个panel是有大小的
首先第一个分辨率它会不一样
其次我中间的panel尺寸也会不一样
这个是现在工业类比较大的,是一个0.95英寸的
那同时我们还会有一些很小的
比如说像这颗
0.45英寸的
分辨率也是WXJA的
那分辨率也是不一样的,那我们同时就是
TI也提供了针对不同分辨率的
3D机器视觉的参考设计
因为我们被检测物体的大小不一样
我们对精度的要求也不一样
大家也可以在TI的这个库里进行选择
那这是我们的一个基于DLP6500
这是我们DLP芯片的型号
基于DLP6500 1080P的3D
扫描的一个参考设计
大家可以看到它大概就是这样的一个样子
这一部分是工业相机
底下是DLP结构光的生产模块
这部分是我的一个接收板
这是测量时候的一个场景
三维扫描时候的一个场景
大家可以看到被测的是一个很复杂的
一个齿轮件,一个结构件
在这个上面的话,会有很多像条纹一样的东西
这个就是pattern
因为我这是一个静态图 不是动态图
所以我讲一下,就是其实这个pattern
会变,会不停地在往上打
然后通过去打这个pattern
然后,我的相机在一侧抓取数据
并运算出最终的电源图
大家可以看到 彩色的就是我们视觉应用
已经抓取到的
数字的点云数据
就是已经被扫描出来的数据
那上面是我们原始的数据
那这一套参考的东西 TI都会提供
在TI官网中都会有
那这样的一个参考设计包含什么
首先第一个 包含了我们的硬件
你需要什么样的硬件
TI提供了基于DLP的结构光生成器
提供了所有的接口
公共版。当然,相机部分,因为TI没有这种工业相机
那我们会推荐几个相机 大家可以去选
那其次 我们包含了系统设计
这个里面就有一些我们怎么去组装
怎么去设计我们的结构件
怎么去做evaluation的一些user guide
包括我们的一些测试的数据
测试的数据
还有我们的系统的框图
还有我们的[inaudible]
这些都可以在TI官网上拿到
那最重要的,刚才我前面讲到的这些东西
都是硬件本身
那对于这样的一个系统的话,软件是很重要的
我相机抓取了以后,我怎么去把它做成电源图,怎么去算
那TI同样也是提供了一个SDK
我们叫lightcrafter SDK
也就是说大家在我们官网上找到这个link
去拿到这些所有硬件
把结构搭起来
去下载我们的SDK 就可以去实现
扫描的功能
3D视觉的功能
那这个就是我要讲的一个核心器件
基于TI DLP4500 lightcrafter
结构光生成器
那大家看到这个东西其实是一个电路板加底下的
一些光学器件
还有一些成像器件
那我刚才说到的DLP的核心器件DMD
就在这个板子里面 看不见,它不像我们
[inaudible]一样 是在表面贴着
它是在这个[inaudible]底下 组装在里面的
因为对于一个DLP系统来说
我们的这个器件制作光路调制
我还需要一些外部的光源
比如LED
我需要透镜 我需要棱镜
我还需要一些结构件来固定
那这部分的东西 我相信对于大家来说
其实是蛮难去搞的
因为毕竟我们是做电子的
那这些光学的东西很难去 - 完全不是一个领域
所以我们TI提供的开发板是
把所有的器件放在里面打包好
大家拿这样一个evalution的Kit
只要去接一个HDMI
或者通过SDI 烧录一些我预制的Pattern
我上电 我就可以去投射这样的一个
pattern出来
去跟你的后棱镜结合
那同时回到SDK
SDK软件的部分我们提供什么
第一就是我们这个驱动,整个平台的驱动
怎么去把我的平台驱动起来
我包含所有控制件的驱动
还有一些接口的驱动
第二 calibration
就是在一个典型的结构光测量系统里面
我有camera 我有projector
我还有一些我的被测物体
那这之间是要做标定的
所有的测量系统都要做标定
那我们在SDK里面也提供了标定的方式
怎么去标定
对于工业相机的支持
我们会预制一些 我印象中现在应该是
灰点的工业相机
那我们也预留一些标准接口
大家可以去调一些自己的工业相机
其次 我的结构光怎么去让它往出打
怎么去调制这些结构光
以及最后 点云图的算法
怎么去把点云图算出来
然后点云图怎么再重建成我的三维模型
这些都是有的
那举两个例子
前面刚才讲了一些我们理论上的应用方式
以及我们的参考设计,那么这样的三维的一个
成像方式 或者说我们的机器视觉
应用在哪些领域呢
这是我们两个客人做的产品
一个是seikowave
是一家美国还是加拿大的公司
它用我们的结构光生成器
DLP的结构光生成器
做了这样的一个器件
它是用来检测什么
它用来检测这个地方
这是一个像一个曲面的一个金属
它其实是用来检测管道的锈迹
就是在欧美,尤其是在俄罗斯或者美国
有很多户外的这种输出管
是在露天的
那输出管是金属的
它一定会发生氧化
会锈,那锈了的话就会裂
或者以后出现漏油的问题
那因为管道很长
我们的客人不可能说时时刻刻派工人在那边去检测
所以它就需要用到视觉的应用
让机器人去做
但对于这种锈迹来说
我们往往是要防患于未然的
就是在它锈之前就要检测问题在哪里
大家知道所有的金属在氧化的时候它会发生
形变
就是我们说生锈了
它会有锈
那这个锈在初期的时候它其实是很小的
可能它的凸起或者它的形变
是几十个微米级的
那这个时候就要用到结构光
去做微米级的检测
他做了这样的一个器件
把它套在管道上 让它实时移动
进行翻转
最终检测出它上面的这个瑕疵
或者锈迹
那这边是我们上海的一家公司
叫carestream
它做的一个齿科类的扫描
那它为什么也要用到结构光呢
就是,如果在座的有一些朋友去看过牙齿
无论是镶牙齿或者是怎么样
你都会有经验 尤其是你要拔下牙齿
他会让你去做咬模
给你一些石膏还是石蜡什么样的东西
让你去咬
咬到了以后 拿出一个模型再去
加工 那这个其实对于我们来说
是很痛苦的一个过程
而且有时候一次咬不准
很难受 那就有这样的一个叫口内的扫描仪
它利用结构光高精度 高速的方式
去直接在你的牙齿上过一圈
我就可以把我牙齿的3D信息直接构建出来
最终送到牙科所去做牙齿的制造
那这两个应用其实都是一个很典型的工业
和一些,比如消费或者行业内的一些三维成像
的一些应用
那在这个地方 其实还有一个DLP结构光很重要的一个优势
我在前面没有讲 就是我们的
高精度
像这样的几十个微米的锈迹
还有牙齿的一些细节
因为大家知道 如果牙齿扫描的不准的话 做出来镶进去
也很很难受 会磨 会怎么样 会抱怨
你可能说这个医院水平太差 手艺活太差
所以 每个人的牙齿也又不一样
所以它对整个的精度要求也是很高的
也是在几十个上百个微米级的
误差范围 所以
这都是DLP的结构光能够带来的优势
就是用DLP的结构光这个模板
我们是可以达到微米级的扫描精度
所以我一说这个微米级的扫描精度
可能有做过视觉类的同事就知道
哦 原来你跟TUF 你跟双目 你跟别的方式
它最大的区别在哪里
那前面我讲的所有东西都是基于DLP
基于DLP结构光的三维视觉应用
那最后我再提一下 因为今天
我们有很多同事介绍了我们TI的
多核一构的处理器
AM57系列,AM Sitara
AM 4几系列
那同时 我们TI
也提供了一套基于这样的多核一构处理器的
嵌入式的3D扫描方案
那这个是我们的多核一构处理器的一个介绍
我就不详细概述了
主要就是我们的性能会比较高
我们的架构会比较领先 我们会有BST
我们有graphic
我们会有多核使用 以后可能有537几
去处理不同的事情 我们的mix很强
那这是我们AM57系列的一个家族图
可以看到其实我们根据不同的型号
会有不同的AM核
刚才的D15,有双核1.5G
有单核 我们有一个C66,DSP
我们有Cortex M4
去处理不同的任务
然后我们还有一些graphic的 一些加速
还有外部的一些接口
那TI在去年年底 今年年初的时候
我们发布了这样的一个参考设计
就是把我们刚才我提到的
SDK 它原本是在PC上的
我们把这个SDK从PC移到了我们刚才提到的Sitara上
就是AM57X系列
那这个有什么好处呢
这个好处就是说 我现在在市场上看到有很多
客人需要去PC化的一个视觉类的设计
大家想一下我刚才说的那个石油管道的东西
那我如果要做扫描 我最终的点云图
是要PC去做
那就是说我的机器上
我后面还要再拖一个PC
或者一个laptop
这个东西在室外的话其实是很suffer的
很容易出问题的
那如果我有一个嵌入式的方式
我有这样的一个公共版
我把所有这部分的东西都放在我的
处理器上面去做
等于说我就是有一个lightcrafter 450的板
再加一个控制板
做到一个很紧凑的设备
我不需要PC
我的设备做的很小型化
同时我可以在我的这个平台再去加一些
比如无线、WiFi、蓝牙、GSM的模块
让它直接可以上到云端
那这样的话 我的整个的在
现场的一个布置
就会比较灵活
我的设备也比较满足我们以后会说的
工业4.0啊 智能制造
这样的一个趋势
那这个就是我们提供的参考设计的一个大概的一个样子
大家可以看到 在右下角这张图
可能比较小一些 这个架子
就是我刚才说的,我们的结构光生成器和camera,工业相机
同时我们会有USB,我们会有 trigger类的一些
GPL,去连到我的572X的一个开发板上
那在这个图以外
我们是没有PC的 我们所有的运算,我们所有的点云的生成
都是在5728上去做的
那关召林这边 如果有机会做产品的话
你就可以打一个板子 把5728
跟我这边的结构光生成器放在一起
那我们以后的基于结构光3D扫描的模块
可能就只有这样的样子
就很小的一个产品
没有PC
这张图是一个分解图
这样的一个参考设计 第一个
包含了我们的lifecrafter 450
和我刚才讲的DLP的结构光生成器
一个相机,工业相机
然后再加我们的一个EBI
那点云图的所有的逻辑
所有的算法都在我们的SDK里,都做好了
放在我们的EBI上
最终点云就可以在这里看到
当然你可以接一个HDMI
把它显示在显示设备上 你也可以去接WiFi
你可以去接GSM
3G、4G让它传到云端
这几个就是比较灵活的一个方式
那当然我们的参考设计是基于TI的DLP比较大
那我们同时在外面会有我们的第三方
像在门口我们的[inaudible]社区
我们的[inaudible]vision
他们就有一个板子 会把我们的
lifecrafter 450 控制的部分
和572X系列
处理器的部分 包括一些[inaudible]无线的一些模块
放在一个板子上
大家一会结束了可以去到那边看一下
也方便大家以后的一个设计
所以从我们的角度做一个summary
我们觉得,我相信很多在座的各位是
第一次接触DLP
尤其是DLP的结构光在工业上的应用
大家可能会觉得DLP是不是用起来很麻烦
里面有很多光学的东西
那我们本地
无论是TI总部还是本地
我们也是做了很多的东西 在简化我们的上手过程
我们把我们的芯片做了模块化的一些设计
所以说 从我们的角度,我们觉得如果您要做一个基于DLP的一个结构光
方案 也很简单
第一 先到我们的ti.com上
去找对应的我们的参考设计
以及我们设计使用到的一些
辅助文档
视频 增进你的了解
第二 根据你被测物体的大小
你想要的精度
分辨率 然后去选择一个合适的TI的EVI
或者是我们第三方的开发板
那这个开发板会集成所有需要测量的光源
镜头 这些所有的辅助器件
你拿来就用 不用管里面的DLP是怎么设计光路的
然后同时如果有问题的话
可以在线包括我们的E2E
有些同事用过
我们会有一些在线支持的网站
去拿到相应的支持
最终根据我们的参考设计
去设计出您这边自己的一个产品出来
所以这个也是从我们的角度 我们觉着也是
比较容易上手 最起码也是比较容易评估这个产品
当然我们的EVI
我们的第三方做的东西是我们现有的产品
就我们现有的能耗搭建出来的一些产品
如果说在做的各位有一些自己的想法
比如我测量的东西 我有一些
有一些独一无二的地方
或者说我的系统设计有些特殊的要求
我们在本地 在上海
在深圳 我们都有我们的工程师团队
包括我们在深圳 在北京
在上海华东地区
都有很多我们第三方的合作伙伴
可以根据您的需要去定制你们的光学设计、镜头设计
包括一些系统的设计
那这些具体的东西
可以下来找我再聊
因为我们今天时间也比较紧
那我最后的话 留一下我的联系方式在这里
我叫Terry Yuan 袁国航
我本身的办公地点 我在上海
但我也会到处跑
那这是我的联系方式
和邮件
欢迎大家后面有问题的话 跟我联系
OK 谢谢大家
手机看
扫码用手机观看
 视频简介
视频简介
基于AM57xx 和 DLP4500 结构光原理的嵌入式 3D 扫描仪
所属课程:TI EP day 研讨会课程
发布时间:2017.12.06
视频集数:26
本节视频时长:00:40:21
TI EP day 研讨会课程合辑。




 未学习 Simplelink™ MCU平台介绍以及Simplelink™ Academy深度学习
未学习 Simplelink™ MCU平台介绍以及Simplelink™ Academy深度学习
 未学习 TI嵌入式产品总览
未学习 TI嵌入式产品总览
 未学习 基于 AM335x 国网充电桩 HM& 计费模块和采集系统 2.0 终端解决方案
未学习 基于 AM335x 国网充电桩 HM& 计费模块和采集系统 2.0 终端解决方案
 未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (1)
未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (1)
 未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (2)
未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (2)
 未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (3)
未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (3)
 未学习 MSP430 USS 超声波传感 和 LEA 低功耗加速 (1)
未学习 MSP430 USS 超声波传感 和 LEA 低功耗加速 (1)
 未学习 MSP430 USS 超声波传感 和 LEA 低功耗加速 (2)
未学习 MSP430 USS 超声波传感 和 LEA 低功耗加速 (2)
 未学习 如何在C2000上实现小于1微秒的电流环的设计(1)
未学习 如何在C2000上实现小于1微秒的电流环的设计(1)
 未学习 如何在C2000上实现小于1微秒的电流环的设计(2)
未学习 如何在C2000上实现小于1微秒的电流环的设计(2)
 未学习 77GHz 单芯片毫米波产品介绍
未学习 77GHz 单芯片毫米波产品介绍
 未学习 基于 AM57xx 和 AMIC110-120 工业现场总线 EtherCAT 主从解决方案
未学习 基于 AM57xx 和 AMIC110-120 工业现场总线 EtherCAT 主从解决方案
 未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(1)
未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(1)
 未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(2)
未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(2)
 未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(3)
未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(3)
 未学习 基于AM57xx 和 DLP4500 结构光原理的嵌入式 3D 扫描仪
未学习 基于AM57xx 和 DLP4500 结构光原理的嵌入式 3D 扫描仪
 未学习 TI蓝牙5.0方案介绍以及CC2640R2F动手实验
未学习 TI蓝牙5.0方案介绍以及CC2640R2F动手实验
 未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (1)
未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (1)
 未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (2)
未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (2)
 未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (3)
未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (3)
 未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (1)
未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (1)
 未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (2)
未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (2)
 未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (3)
未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (3)
 未学习 基于小于1GHz和低功耗蓝牙BLE双频产品CC1350,设计创新的本地和云端连接产品(1)
未学习 基于小于1GHz和低功耗蓝牙BLE双频产品CC1350,设计创新的本地和云端连接产品(1)
 未学习 基于小于1GHz和低功耗蓝牙BLE双频产品CC1350,设计创新的本地和云端连接产品(2)
未学习 基于小于1GHz和低功耗蓝牙BLE双频产品CC1350,设计创新的本地和云端连接产品(2)
 未学习 CC1310详细介绍以及软件开发教程
未学习 CC1310详细介绍以及软件开发教程


























