如何在C2000上实现小于1微秒的电流环的设计(1)
播放器加载失败: 未检测到Flash Player,请到
安装
将在30s后自动为您播放下一课程
好,大家好!这个, 我们好像还沉浸在上一节里面。 现在我们...反正这一节有点延续 性,我们都是C2000的一些东西。 那这个刚才我也听了 大家提到的一些问题, 像什么绝对位置传感器啊什么这些, 那我们这节多少会有一点涉及。 那这节我们讲的呢 就是这个高速的电流环。 那这个,不知道 这个标题有没有写啊。 因为我们上一节这个严重的标题党, 就是一微秒电流环。 然后这个,然后里面看到 一微秒电流环讲得其实不多。 那就我们这节 主要讲的是一微秒电流环。 那这个、这个不是标题党啊, 这个里面就是讲 一微秒电流环怎么实现的, 为什么能够实现一微秒的电流环。 所以这个, 那这个也是跟我们的 这个高端的电机应用, 就是我们伺服, 高精度伺服以及这种 快速响应的这种电机控制 系统非常相关的一些技术。 这也是我们TI, 就是在这个最近 新推出的这一系列产品里面, 这个目标非常明确的 去实现这种高性能 电机控制的这个、这些芯片。 专门针对这个应用做出 了芯片的一些设计和调整。 那这个,大家如果是 这个了解C2000的话呢, 可以知道就是C2000这个芯片 就是专门为实时控制系统而设计的。 而且它这个二、三十年 的这个整个这个历程来说, 相当于是在,也是充分证明了 它的在实施控制领域的这个成功。 像数字电源和电机控制, 那之前它的占有率是非常非常高的, 一度曾经是百分之百。 那只要是电机和电源的这个工程师, 没有说不知道、不了解C2000的。 当然现在这个世界变了, 所以这个,有一些这个新的情况。 但是呢,我起码从我这个 十多年的这个跟C2000打交道来说, 那你一些高性能的一些, 或者是你要求这个 控制性能非常好的情况下, 还真有些情况是非C2000这个不行。 有一些芯片可以做, 但是做不到这么好的性能。 如果是你说“哎,只要能赚就行了,” 那是很多都是可以做。 好,这个,这是开场白啊。 这开场白有点长。 那我们先切入正题。 呃,这个就是说,我们在 这个C2000的Real-time Control, 它服务的这个各行各业。 主要我们,简单来讲呢 就是数字电源和电机控制。 然后,那这个C2000为什么, 尤其是我们现在新一代的C2000, 它为什么能够实现这个实时控制? 因为现在我们也知道 嵌入式的芯片也在长足地发展。 现在什么主频1G的 这种MCU其实也很常见了。 那C2000我们知道,即使最新款 的C2000,它的主频也只有200兆。 但实际上我们 如果去看一个MCU的话, 只看主频,其实是, 呃,怎么说呢,很片面的。 那我们这里讲的是要实时计算效率。 其实我会向大家 证明就是C2000两百兆, 它的计算能力和计算效率是远远高于 主频哪怕是1G呀 什么这些、这些芯片。 那这个原因呢就是说 我们就是原来的C28核。 后来在C28核的基础 上我们会有一个CLA。 那这个我们之前 熟悉Piccolo、Delfino的 这些系列的工程师也会了解, 这两个结构不是新的结构。 那我们最...现在的377x系列, 就是37xS或37xD。 那S呢就是一个主28和一个CLA。 37xD呢就是两个主28和两个CLA, 那相当于我们叫 双核,实际上它是四核了。 那对于这个主28和每一个 主28核里面有VCU、TMU、FPU。 FPU、VCU呢,之前我们都有。 那这个TMU是 这个新一代C2000里面, 这是新的一个Feature。 它叫三角函数加速器。 这个硬件加速单元是非常强大的, 它会大大提升我们计算这个除法, 三角函数 SIN、COS、ARCTAN这些时间。 那之前我们知道 C2000它有硬件乘法加速器, 所以在我们实时环路 中我们算乘法非常快。 所以尽量在算法里避免 除法,因为除法的Cycle太多。 我们中断里算除法啊这些运算太多 你的主中断时间就过长。 那有了TMU,我们以 计算一个SIN来举例吧。 我们计算SIN,原来我们 如果只用浮点的MPU去算的话, 大概需要20-30个CPU Cycle。 加了TMU运行下速度 算一个SIN是一个CPU Cycle。 所以你可以看到它是 20-30倍的这个速度的提升。 所以你说, 我如果只从主频上提升, 我要提升多少倍才能跟 它的计算效率相关,一样。 同时呢,就是我们 知道AD呀,PWM呀, 它们这些都是直接 和这个CPU进行沟通的, 所以你如果主频到1G 它必然有什么Cache啊, 什么这些预缓存哪等等。 它整个这个流程读写执行 下来,其实它的这个Cycle是很多的。 那这个,我们这个C2000这些特点。 好,主28核。 然后这个 TMU。 这个SIN、 COS、除法、ARCTAN等等。 当然CLA是没有这个TMU单元的, 那我们可以把 我们的code进行合理的分配。 然后这个AD。 那对于377D来说呢, 它是有两种配置。 我可以配置成12位的这个AD, 也可以配置成16位的这个AD。 同时它还有这个delta-sigma, delta-sigma采样 这里现在没显示出来。 然后PWM,高精度PWM。 15这个ps,这叫皮秒。 那我们之前用过高精度的知道, 原来的Piccolo的高精度呢 实际上只有PWM-A可以发出高精度, B就出不来了,所以在 有些应用中是有点蹩脚的。 那现在呢,我们这个 新一代的我们叫PWM Type 4, 就是第四代的这个PWM模块, 它是AB互补,可以发高精度的。 就是互补PWM都是 高精度,这是可以的。 所以,而且这个377D呢, 它这个峰-峰, 这个有三百、三百多皮秒, 所得它的资源是非常丰富的。 OK。这是我们的一个 C2000现在的一个Roadmap。 这个,总体来说呢,就是越下面的, 这个价格越便宜, 这个性能越低一点。 越上面呢,就是稍微贵 一点,但是性能是非常好的。 大家看到这颗芯片37XD, 那我们有377D、379D等等, 37XS,这两个 其实我们仍然是一个, 只不过一个是单核, 也就是一个主28,一个CLA; 一个是双核, 也就是两个主28,两个CLA。 就是这种区别,然后,07、004。 那我们看这块,3C07004, 这些是我们叫这个,就是新一代的, 就是所有我们刚才 讲到这些新的这个指标, 像PWM新的指标,AD新的指标, delta-sigma等等这些新的指标, 在这新一代里边 它们的外设都是一样的。 只不过就是说, 有可能这个有这个24个PWM, 这个可能就有七个或者十个, 就是数量啊、各种Flash 啊这种配置稍微有些差异。 那基本的外设的 这些这个技术都是一样的。 所以这颗芯片004是 我们相对于这个我们低端, 呃,低价位的, 但是它的计算能力呀, 我们就是很直观地去评价的话呢, 可能我们可以认为 它的计算能力和这个 它整个的这个, 就是整个它的能力吧, 是相当于这一块儿芯片的能力。 而且我们后面出来的 所有的芯片全都是带TMU的。 FPU啊,就是全是浮点的。 所以我们以后这个搞控制的工程师, 这个长出了一口气啊, 再也不用搞什么定标啦。 所以这个。因为我们 知道就是其实工程中 大概有,就是控制环路上的 问题大概有七成到八成都是因为定标 或是定标相关引起的 这些各种乱七八糟问题。 所以我们,这个话不能讲, 这以后,可能我们嵌入式 这个做控防环路都不用 搞什么定标了,全都是浮点了。 好。呃,对!然后对, 这里还要跟大家提一下呢, 就是我们在这个377这些,我们 还有一个就是C2000之前可能 做的工作比较少的就是功能安全。 那我们现在在,尤其 就是最上面这个377 37X系列 我们加入了一些功能安全的考量, 以及我们会做一些功能安全的认证。 那后面我们有一些功能 安全需求的这个同志们, 可以去就是用这颗 芯片去做功能安全相关的。 那如果你需要相关 的资料呢,TI现在专门, TI官网上有一个叫 Safe TI的一个页面, 那里面有,就是所有 TI的这个跟功能安全相关的。 那比如说您现在要做IEC61508, 这个IEC60730等等这些认证, 我们都有免费的 这个支持的库给您, 你直接就把这个库加到你的 功能代码里面就可以去做这个认证。 这,稍微提一下。 那当然这个工作量其实不小的。 这是这个。OK,这个37xD系列。 那我们的这个主要的一些Feature, 200兆的主核, 就这两个都是200兆, 然后这个主28 有FPU、TMU等等、等等。 然后这个12位这个, 这个刚才跟Linda讲的一样, 3.5MSPS的这个AD,这个。 好。然后这个要提到 就是有一个四个独立的, 就是最多是可以16位的这个AD。 那我们之前看到我们Piccolo什么, 它有什么A组、B组两组这个AD, 但实际上它的转换模块只有一个。 那我们现在是四个转换模块。 真的就是完全的,如果是 四个转换模块同一时刻去采的话, 就是真正上同一时刻采四路的信号。 那所以这个对于实时 控制系统,它一点延迟都没有。 不像原来是一个模块, 它是,其实是分着采的, 排着队采,这个。 然后呢就是像 我们有这个窗口比较器, 那刚才这个Linda讲的时候 也提到了我们这个比较模块。 那除了有正负的,原来 我们只能只比这个半边嘛, 现在有正负,同时使用窗口。 这个窗口呢,就是 刚才她说的就是Blanking, 就是我有一些地方,我 确定这个地方肯定就是干扰, 我不希望它触发这个方向, 那么我就可以把它 这个,相当于我就不看, 把它滤掉。然后 相当于就是我开一个窗口, 只在这个窗口里面 我去看我想要的信号去比。 窗口比较器。 然后这个sigma-delta的 这个我们叫解调滤波器。 就是我们 sigma-delta,我们了解的知道 它需要一个前端调制的环节, 后端还需要一个解调的环节, 那我们这里面芯片 就放了解调的环节。 OK。然后就是PGA啊 等等这个模拟前端啊, 这个也是得到了大幅的改善。 因为我们之前这个在Piccolo 05系列 有一些这个内部 的模拟运放在里面。 但实际上那个呢, 用起来呢,不够灵活。 那就我们现在也是 对这个模拟运放前端 集成进去的做了 一个比较大的改进。 如果是呢, 大家想评估的话呢, 我们现在就是Control Card啊,还有它的Docking啊这些, 都可以这个大家 去申请,或者是购买。 那它的封装,这个, 我们看得不大清楚啊, 就是300... 337-Pin的, 还有176-Pin的。 这个相关的这个数据呢, 大家可以去官网 上仔细去查它的那个pin。 然后就是004。 那004和377比呢, 其实它的主核啊, 以及这些主要的外设 它的这些这个技术啊, 这个采用的技术都是一样的。 只不过是有些裁剪。 呃,004呢是100兆。 这个,七个 这个芯片内的这个PGA。 七路。然后这个PMBUS啊,这个。 然后这里提到的就是,是原 来06x系列这个芯片能耗的一半。 它的能耗,因为 采用了这个不同的工艺, 它的能耗,就是功耗降低了。 就是单颗芯片的这个功耗。 三组这个12位的这个AD, 三个AD模块,七个窗口比较器, 四个delta-sigma的这个解调模块。 然后这个FSI也有 就是高速窗口通讯。 那其实我们的FSI还有EMIF, 那其实这些个设计呢 就是可以,就是让大家在芯片级 对实时数据进行高速通讯。 所以这个,一个呢是有一些系统设计 就需要这样多芯片的高速通讯, 还有一个需求呢就是功能安全。 那我们可能有一颗主芯片去控, 另外一颗主芯片去检查 这颗芯片是不是有问题。 那这是功能安全的一些系统架构。 OK,那同样的,它的 这些Control Card啊等等这些 都已经ready了, 大家可以去申请、去购买。
好,大家好!这个, 我们好像还沉浸在上一节里面。 现在我们...反正这一节有点延续 性,我们都是C2000的一些东西。 那这个刚才我也听了 大家提到的一些问题, 像什么绝对位置传感器啊什么这些, 那我们这节多少会有一点涉及。 那这节我们讲的呢 就是这个高速的电流环。 那这个,不知道 这个标题有没有写啊。 因为我们上一节这个严重的标题党, 就是一微秒电流环。 然后这个,然后里面看到 一微秒电流环讲得其实不多。 那就我们这节 主要讲的是一微秒电流环。 那这个、这个不是标题党啊, 这个里面就是讲 一微秒电流环怎么实现的, 为什么能够实现一微秒的电流环。 所以这个, 那这个也是跟我们的 这个高端的电机应用, 就是我们伺服, 高精度伺服以及这种 快速响应的这种电机控制 系统非常相关的一些技术。 这也是我们TI, 就是在这个最近 新推出的这一系列产品里面, 这个目标非常明确的 去实现这种高性能 电机控制的这个、这些芯片。 专门针对这个应用做出 了芯片的一些设计和调整。 那这个,大家如果是 这个了解C2000的话呢, 可以知道就是C2000这个芯片 就是专门为实时控制系统而设计的。 而且它这个二、三十年 的这个整个这个历程来说, 相当于是在,也是充分证明了 它的在实施控制领域的这个成功。 像数字电源和电机控制, 那之前它的占有率是非常非常高的, 一度曾经是百分之百。 那只要是电机和电源的这个工程师, 没有说不知道、不了解C2000的。 当然现在这个世界变了, 所以这个,有一些这个新的情况。 但是呢,我起码从我这个 十多年的这个跟C2000打交道来说, 那你一些高性能的一些, 或者是你要求这个 控制性能非常好的情况下, 还真有些情况是非C2000这个不行。 有一些芯片可以做, 但是做不到这么好的性能。 如果是你说“哎,只要能赚就行了,” 那是很多都是可以做。 好,这个,这是开场白啊。 这开场白有点长。 那我们先切入正题。 呃,这个就是说,我们在 这个C2000的Real-time Control, 它服务的这个各行各业。 主要我们,简单来讲呢 就是数字电源和电机控制。 然后,那这个C2000为什么, 尤其是我们现在新一代的C2000, 它为什么能够实现这个实时控制? 因为现在我们也知道 嵌入式的芯片也在长足地发展。 现在什么主频1G的 这种MCU其实也很常见了。 那C2000我们知道,即使最新款 的C2000,它的主频也只有200兆。 但实际上我们 如果去看一个MCU的话, 只看主频,其实是, 呃,怎么说呢,很片面的。 那我们这里讲的是要实时计算效率。 其实我会向大家 证明就是C2000两百兆, 它的计算能力和计算效率是远远高于 主频哪怕是1G呀 什么这些、这些芯片。 那这个原因呢就是说 我们就是原来的C28核。 后来在C28核的基础 上我们会有一个CLA。 那这个我们之前 熟悉Piccolo、Delfino的 这些系列的工程师也会了解, 这两个结构不是新的结构。 那我们最...现在的377x系列, 就是37xS或37xD。 那S呢就是一个主28和一个CLA。 37xD呢就是两个主28和两个CLA, 那相当于我们叫 双核,实际上它是四核了。 那对于这个主28和每一个 主28核里面有VCU、TMU、FPU。 FPU、VCU呢,之前我们都有。 那这个TMU是 这个新一代C2000里面, 这是新的一个Feature。 它叫三角函数加速器。 这个硬件加速单元是非常强大的, 它会大大提升我们计算这个除法, 三角函数 SIN、COS、ARCTAN这些时间。 那之前我们知道 C2000它有硬件乘法加速器, 所以在我们实时环路 中我们算乘法非常快。 所以尽量在算法里避免 除法,因为除法的Cycle太多。 我们中断里算除法啊这些运算太多 你的主中断时间就过长。 那有了TMU,我们以 计算一个SIN来举例吧。 我们计算SIN,原来我们 如果只用浮点的MPU去算的话, 大概需要20-30个CPU Cycle。 加了TMU运行下速度 算一个SIN是一个CPU Cycle。 所以你可以看到它是 20-30倍的这个速度的提升。 所以你说, 我如果只从主频上提升, 我要提升多少倍才能跟 它的计算效率相关,一样。 同时呢,就是我们 知道AD呀,PWM呀, 它们这些都是直接 和这个CPU进行沟通的, 所以你如果主频到1G 它必然有什么Cache啊, 什么这些预缓存哪等等。 它整个这个流程读写执行 下来,其实它的这个Cycle是很多的。 那这个,我们这个C2000这些特点。 好,主28核。 然后这个 TMU。 这个SIN、 COS、除法、ARCTAN等等。 当然CLA是没有这个TMU单元的, 那我们可以把 我们的code进行合理的分配。 然后这个AD。 那对于377D来说呢, 它是有两种配置。 我可以配置成12位的这个AD, 也可以配置成16位的这个AD。 同时它还有这个delta-sigma, delta-sigma采样 这里现在没显示出来。 然后PWM,高精度PWM。 15这个ps,这叫皮秒。 那我们之前用过高精度的知道, 原来的Piccolo的高精度呢 实际上只有PWM-A可以发出高精度, B就出不来了,所以在 有些应用中是有点蹩脚的。 那现在呢,我们这个 新一代的我们叫PWM Type 4, 就是第四代的这个PWM模块, 它是AB互补,可以发高精度的。 就是互补PWM都是 高精度,这是可以的。 所以,而且这个377D呢, 它这个峰-峰, 这个有三百、三百多皮秒, 所得它的资源是非常丰富的。 OK。这是我们的一个 C2000现在的一个Roadmap。 这个,总体来说呢,就是越下面的, 这个价格越便宜, 这个性能越低一点。 越上面呢,就是稍微贵 一点,但是性能是非常好的。 大家看到这颗芯片37XD, 那我们有377D、379D等等, 37XS,这两个 其实我们仍然是一个, 只不过一个是单核, 也就是一个主28,一个CLA; 一个是双核, 也就是两个主28,两个CLA。 就是这种区别,然后,07、004。 那我们看这块,3C07004, 这些是我们叫这个,就是新一代的, 就是所有我们刚才 讲到这些新的这个指标, 像PWM新的指标,AD新的指标, delta-sigma等等这些新的指标, 在这新一代里边 它们的外设都是一样的。 只不过就是说, 有可能这个有这个24个PWM, 这个可能就有七个或者十个, 就是数量啊、各种Flash 啊这种配置稍微有些差异。 那基本的外设的 这些这个技术都是一样的。 所以这颗芯片004是 我们相对于这个我们低端, 呃,低价位的, 但是它的计算能力呀, 我们就是很直观地去评价的话呢, 可能我们可以认为 它的计算能力和这个 它整个的这个, 就是整个它的能力吧, 是相当于这一块儿芯片的能力。 而且我们后面出来的 所有的芯片全都是带TMU的。 FPU啊,就是全是浮点的。 所以我们以后这个搞控制的工程师, 这个长出了一口气啊, 再也不用搞什么定标啦。 所以这个。因为我们 知道就是其实工程中 大概有,就是控制环路上的 问题大概有七成到八成都是因为定标 或是定标相关引起的 这些各种乱七八糟问题。 所以我们,这个话不能讲, 这以后,可能我们嵌入式 这个做控防环路都不用 搞什么定标了,全都是浮点了。 好。呃,对!然后对, 这里还要跟大家提一下呢, 就是我们在这个377这些,我们 还有一个就是C2000之前可能 做的工作比较少的就是功能安全。 那我们现在在,尤其 就是最上面这个377 37X系列 我们加入了一些功能安全的考量, 以及我们会做一些功能安全的认证。 那后面我们有一些功能 安全需求的这个同志们, 可以去就是用这颗 芯片去做功能安全相关的。 那如果你需要相关 的资料呢,TI现在专门, TI官网上有一个叫 Safe TI的一个页面, 那里面有,就是所有 TI的这个跟功能安全相关的。 那比如说您现在要做IEC61508, 这个IEC60730等等这些认证, 我们都有免费的 这个支持的库给您, 你直接就把这个库加到你的 功能代码里面就可以去做这个认证。 这,稍微提一下。 那当然这个工作量其实不小的。 这是这个。OK,这个37xD系列。 那我们的这个主要的一些Feature, 200兆的主核, 就这两个都是200兆, 然后这个主28 有FPU、TMU等等、等等。 然后这个12位这个, 这个刚才跟Linda讲的一样, 3.5MSPS的这个AD,这个。 好。然后这个要提到 就是有一个四个独立的, 就是最多是可以16位的这个AD。 那我们之前看到我们Piccolo什么, 它有什么A组、B组两组这个AD, 但实际上它的转换模块只有一个。 那我们现在是四个转换模块。 真的就是完全的,如果是 四个转换模块同一时刻去采的话, 就是真正上同一时刻采四路的信号。 那所以这个对于实时 控制系统,它一点延迟都没有。 不像原来是一个模块, 它是,其实是分着采的, 排着队采,这个。 然后呢就是像 我们有这个窗口比较器, 那刚才这个Linda讲的时候 也提到了我们这个比较模块。 那除了有正负的,原来 我们只能只比这个半边嘛, 现在有正负,同时使用窗口。 这个窗口呢,就是 刚才她说的就是Blanking, 就是我有一些地方,我 确定这个地方肯定就是干扰, 我不希望它触发这个方向, 那么我就可以把它 这个,相当于我就不看, 把它滤掉。然后 相当于就是我开一个窗口, 只在这个窗口里面 我去看我想要的信号去比。 窗口比较器。 然后这个sigma-delta的 这个我们叫解调滤波器。 就是我们 sigma-delta,我们了解的知道 它需要一个前端调制的环节, 后端还需要一个解调的环节, 那我们这里面芯片 就放了解调的环节。 OK。然后就是PGA啊 等等这个模拟前端啊, 这个也是得到了大幅的改善。 因为我们之前这个在Piccolo 05系列 有一些这个内部 的模拟运放在里面。 但实际上那个呢, 用起来呢,不够灵活。 那就我们现在也是 对这个模拟运放前端 集成进去的做了 一个比较大的改进。 如果是呢, 大家想评估的话呢, 我们现在就是Control Card啊,还有它的Docking啊这些, 都可以这个大家 去申请,或者是购买。 那它的封装,这个, 我们看得不大清楚啊, 就是300... 337-Pin的, 还有176-Pin的。 这个相关的这个数据呢, 大家可以去官网 上仔细去查它的那个pin。 然后就是004。 那004和377比呢, 其实它的主核啊, 以及这些主要的外设 它的这些这个技术啊, 这个采用的技术都是一样的。 只不过是有些裁剪。 呃,004呢是100兆。 这个,七个 这个芯片内的这个PGA。 七路。然后这个PMBUS啊,这个。 然后这里提到的就是,是原 来06x系列这个芯片能耗的一半。 它的能耗,因为 采用了这个不同的工艺, 它的能耗,就是功耗降低了。 就是单颗芯片的这个功耗。 三组这个12位的这个AD, 三个AD模块,七个窗口比较器, 四个delta-sigma的这个解调模块。 然后这个FSI也有 就是高速窗口通讯。 那其实我们的FSI还有EMIF, 那其实这些个设计呢 就是可以,就是让大家在芯片级 对实时数据进行高速通讯。 所以这个,一个呢是有一些系统设计 就需要这样多芯片的高速通讯, 还有一个需求呢就是功能安全。 那我们可能有一颗主芯片去控, 另外一颗主芯片去检查 这颗芯片是不是有问题。 那这是功能安全的一些系统架构。 OK,那同样的,它的 这些Control Card啊等等这些 都已经ready了, 大家可以去申请、去购买。
好,大家好!这个, 我们好像还沉浸在上一节里面。
现在我们...反正这一节有点延续 性,我们都是C2000的一些东西。
那这个刚才我也听了 大家提到的一些问题,
像什么绝对位置传感器啊什么这些,
那我们这节多少会有一点涉及。
那这节我们讲的呢 就是这个高速的电流环。
那这个,不知道 这个标题有没有写啊。
因为我们上一节这个严重的标题党,
就是一微秒电流环。
然后这个,然后里面看到 一微秒电流环讲得其实不多。
那就我们这节 主要讲的是一微秒电流环。
那这个、这个不是标题党啊,
这个里面就是讲 一微秒电流环怎么实现的,
为什么能够实现一微秒的电流环。
所以这个, 那这个也是跟我们的
这个高端的电机应用,
就是我们伺服, 高精度伺服以及这种
快速响应的这种电机控制 系统非常相关的一些技术。
这也是我们TI, 就是在这个最近
新推出的这一系列产品里面,
这个目标非常明确的
去实现这种高性能 电机控制的这个、这些芯片。
专门针对这个应用做出 了芯片的一些设计和调整。
那这个,大家如果是 这个了解C2000的话呢,
可以知道就是C2000这个芯片
就是专门为实时控制系统而设计的。
而且它这个二、三十年 的这个整个这个历程来说,
相当于是在,也是充分证明了
它的在实施控制领域的这个成功。
像数字电源和电机控制,
那之前它的占有率是非常非常高的,
一度曾经是百分之百。 那只要是电机和电源的这个工程师,
没有说不知道、不了解C2000的。
当然现在这个世界变了,
所以这个,有一些这个新的情况。
但是呢,我起码从我这个
十多年的这个跟C2000打交道来说,
那你一些高性能的一些,
或者是你要求这个 控制性能非常好的情况下,
还真有些情况是非C2000这个不行。
有一些芯片可以做, 但是做不到这么好的性能。
如果是你说“哎,只要能赚就行了,”
那是很多都是可以做。
好,这个,这是开场白啊。
这开场白有点长。 那我们先切入正题。
呃,这个就是说,我们在 这个C2000的Real-time Control,
它服务的这个各行各业。
主要我们,简单来讲呢 就是数字电源和电机控制。
然后,那这个C2000为什么,
尤其是我们现在新一代的C2000,
它为什么能够实现这个实时控制?
因为现在我们也知道
嵌入式的芯片也在长足地发展。
现在什么主频1G的 这种MCU其实也很常见了。
那C2000我们知道,即使最新款 的C2000,它的主频也只有200兆。
但实际上我们 如果去看一个MCU的话,
只看主频,其实是, 呃,怎么说呢,很片面的。
那我们这里讲的是要实时计算效率。
其实我会向大家 证明就是C2000两百兆,
它的计算能力和计算效率是远远高于
主频哪怕是1G呀 什么这些、这些芯片。
那这个原因呢就是说 我们就是原来的C28核。
后来在C28核的基础 上我们会有一个CLA。
那这个我们之前 熟悉Piccolo、Delfino的
这些系列的工程师也会了解,
这两个结构不是新的结构。
那我们最...现在的377x系列,
就是37xS或37xD。
那S呢就是一个主28和一个CLA。
37xD呢就是两个主28和两个CLA,
那相当于我们叫 双核,实际上它是四核了。
那对于这个主28和每一个 主28核里面有VCU、TMU、FPU。
FPU、VCU呢,之前我们都有。
那这个TMU是 这个新一代C2000里面,
这是新的一个Feature。
它叫三角函数加速器。
这个硬件加速单元是非常强大的,
它会大大提升我们计算这个除法,
三角函数 SIN、COS、ARCTAN这些时间。
那之前我们知道 C2000它有硬件乘法加速器,
所以在我们实时环路 中我们算乘法非常快。
所以尽量在算法里避免 除法,因为除法的Cycle太多。
我们中断里算除法啊这些运算太多
你的主中断时间就过长。
那有了TMU,我们以 计算一个SIN来举例吧。
我们计算SIN,原来我们 如果只用浮点的MPU去算的话,
大概需要20-30个CPU Cycle。
加了TMU运行下速度 算一个SIN是一个CPU Cycle。
所以你可以看到它是 20-30倍的这个速度的提升。
所以你说, 我如果只从主频上提升,
我要提升多少倍才能跟 它的计算效率相关,一样。
同时呢,就是我们 知道AD呀,PWM呀,
它们这些都是直接 和这个CPU进行沟通的,
所以你如果主频到1G 它必然有什么Cache啊,
什么这些预缓存哪等等。
它整个这个流程读写执行 下来,其实它的这个Cycle是很多的。
那这个,我们这个C2000这些特点。
好,主28核。 然后这个 TMU。
这个SIN、 COS、除法、ARCTAN等等。
当然CLA是没有这个TMU单元的,
那我们可以把 我们的code进行合理的分配。
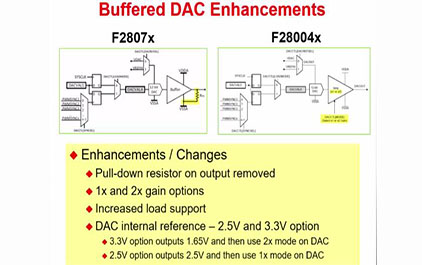
然后这个AD。 那对于377D来说呢,
它是有两种配置。 我可以配置成12位的这个AD,
也可以配置成16位的这个AD。
同时它还有这个delta-sigma,
delta-sigma采样 这里现在没显示出来。
然后PWM,高精度PWM。
15这个ps,这叫皮秒。
那我们之前用过高精度的知道,
原来的Piccolo的高精度呢 实际上只有PWM-A可以发出高精度,
B就出不来了,所以在 有些应用中是有点蹩脚的。
那现在呢,我们这个 新一代的我们叫PWM Type 4,
就是第四代的这个PWM模块,
它是AB互补,可以发高精度的。
就是互补PWM都是 高精度,这是可以的。
所以,而且这个377D呢,
它这个峰-峰, 这个有三百、三百多皮秒,
所得它的资源是非常丰富的。
OK。这是我们的一个 C2000现在的一个Roadmap。
这个,总体来说呢,就是越下面的,
这个价格越便宜, 这个性能越低一点。
越上面呢,就是稍微贵 一点,但是性能是非常好的。
大家看到这颗芯片37XD,
那我们有377D、379D等等,
37XS,这两个 其实我们仍然是一个,
只不过一个是单核, 也就是一个主28,一个CLA;
一个是双核, 也就是两个主28,两个CLA。
就是这种区别,然后,07、004。
那我们看这块,3C07004,
这些是我们叫这个,就是新一代的,
就是所有我们刚才 讲到这些新的这个指标,
像PWM新的指标,AD新的指标,
delta-sigma等等这些新的指标,
在这新一代里边 它们的外设都是一样的。
只不过就是说, 有可能这个有这个24个PWM,
这个可能就有七个或者十个,
就是数量啊、各种Flash 啊这种配置稍微有些差异。
那基本的外设的 这些这个技术都是一样的。
所以这颗芯片004是 我们相对于这个我们低端,
呃,低价位的, 但是它的计算能力呀,
我们就是很直观地去评价的话呢,
可能我们可以认为 它的计算能力和这个
它整个的这个, 就是整个它的能力吧,
是相当于这一块儿芯片的能力。
而且我们后面出来的 所有的芯片全都是带TMU的。
FPU啊,就是全是浮点的。
所以我们以后这个搞控制的工程师,
这个长出了一口气啊, 再也不用搞什么定标啦。
所以这个。因为我们 知道就是其实工程中
大概有,就是控制环路上的 问题大概有七成到八成都是因为定标
或是定标相关引起的 这些各种乱七八糟问题。
所以我们,这个话不能讲, 这以后,可能我们嵌入式
这个做控防环路都不用 搞什么定标了,全都是浮点了。
好。呃,对!然后对, 这里还要跟大家提一下呢,
就是我们在这个377这些,我们
还有一个就是C2000之前可能 做的工作比较少的就是功能安全。
那我们现在在,尤其 就是最上面这个377 37X系列
我们加入了一些功能安全的考量, 以及我们会做一些功能安全的认证。
那后面我们有一些功能 安全需求的这个同志们,
可以去就是用这颗 芯片去做功能安全相关的。
那如果你需要相关 的资料呢,TI现在专门,
TI官网上有一个叫 Safe TI的一个页面,
那里面有,就是所有 TI的这个跟功能安全相关的。
那比如说您现在要做IEC61508,
这个IEC60730等等这些认证,
我们都有免费的 这个支持的库给您,
你直接就把这个库加到你的 功能代码里面就可以去做这个认证。
这,稍微提一下。 那当然这个工作量其实不小的。
这是这个。OK,这个37xD系列。
那我们的这个主要的一些Feature,
200兆的主核, 就这两个都是200兆,
然后这个主28 有FPU、TMU等等、等等。
然后这个12位这个, 这个刚才跟Linda讲的一样,
3.5MSPS的这个AD,这个。
好。然后这个要提到 就是有一个四个独立的,
就是最多是可以16位的这个AD。
那我们之前看到我们Piccolo什么, 它有什么A组、B组两组这个AD,
但实际上它的转换模块只有一个。
那我们现在是四个转换模块。
真的就是完全的,如果是 四个转换模块同一时刻去采的话,
就是真正上同一时刻采四路的信号。
那所以这个对于实时 控制系统,它一点延迟都没有。
不像原来是一个模块, 它是,其实是分着采的,
排着队采,这个。
然后呢就是像 我们有这个窗口比较器,
那刚才这个Linda讲的时候 也提到了我们这个比较模块。
那除了有正负的,原来 我们只能只比这个半边嘛,
现在有正负,同时使用窗口。
这个窗口呢,就是 刚才她说的就是Blanking,
就是我有一些地方,我 确定这个地方肯定就是干扰,
我不希望它触发这个方向,
那么我就可以把它 这个,相当于我就不看,
把它滤掉。然后 相当于就是我开一个窗口,
只在这个窗口里面 我去看我想要的信号去比。
窗口比较器。
然后这个sigma-delta的 这个我们叫解调滤波器。
就是我们 sigma-delta,我们了解的知道
它需要一个前端调制的环节,
后端还需要一个解调的环节,
那我们这里面芯片 就放了解调的环节。
OK。然后就是PGA啊 等等这个模拟前端啊,
这个也是得到了大幅的改善。
因为我们之前这个在Piccolo 05系列
有一些这个内部 的模拟运放在里面。
但实际上那个呢, 用起来呢,不够灵活。
那就我们现在也是 对这个模拟运放前端
集成进去的做了 一个比较大的改进。
如果是呢, 大家想评估的话呢,
我们现在就是Control Card啊,还有它的Docking啊这些,
都可以这个大家 去申请,或者是购买。
那它的封装,这个, 我们看得不大清楚啊,
就是300... 337-Pin的,
还有176-Pin的。
这个相关的这个数据呢,
大家可以去官网 上仔细去查它的那个pin。
然后就是004。 那004和377比呢,
其实它的主核啊, 以及这些主要的外设
它的这些这个技术啊, 这个采用的技术都是一样的。
只不过是有些裁剪。
呃,004呢是100兆。
这个,七个 这个芯片内的这个PGA。
七路。然后这个PMBUS啊,这个。
然后这里提到的就是,是原 来06x系列这个芯片能耗的一半。
它的能耗,因为 采用了这个不同的工艺,
它的能耗,就是功耗降低了。
就是单颗芯片的这个功耗。
三组这个12位的这个AD,
三个AD模块,七个窗口比较器,
四个delta-sigma的这个解调模块。
然后这个FSI也有 就是高速窗口通讯。
那其实我们的FSI还有EMIF,
那其实这些个设计呢 就是可以,就是让大家在芯片级
对实时数据进行高速通讯。
所以这个,一个呢是有一些系统设计
就需要这样多芯片的高速通讯,
还有一个需求呢就是功能安全。
那我们可能有一颗主芯片去控,
另外一颗主芯片去检查 这颗芯片是不是有问题。
那这是功能安全的一些系统架构。
OK,那同样的,它的 这些Control Card啊等等这些
都已经ready了, 大家可以去申请、去购买。
好,大家好!这个, 我们好像还沉浸在上一节里面。 现在我们...反正这一节有点延续 性,我们都是C2000的一些东西。 那这个刚才我也听了 大家提到的一些问题, 像什么绝对位置传感器啊什么这些, 那我们这节多少会有一点涉及。 那这节我们讲的呢 就是这个高速的电流环。 那这个,不知道 这个标题有没有写啊。 因为我们上一节这个严重的标题党, 就是一微秒电流环。 然后这个,然后里面看到 一微秒电流环讲得其实不多。 那就我们这节 主要讲的是一微秒电流环。 那这个、这个不是标题党啊, 这个里面就是讲 一微秒电流环怎么实现的, 为什么能够实现一微秒的电流环。 所以这个, 那这个也是跟我们的 这个高端的电机应用, 就是我们伺服, 高精度伺服以及这种 快速响应的这种电机控制 系统非常相关的一些技术。 这也是我们TI, 就是在这个最近 新推出的这一系列产品里面, 这个目标非常明确的 去实现这种高性能 电机控制的这个、这些芯片。 专门针对这个应用做出 了芯片的一些设计和调整。 那这个,大家如果是 这个了解C2000的话呢, 可以知道就是C2000这个芯片 就是专门为实时控制系统而设计的。 而且它这个二、三十年 的这个整个这个历程来说, 相当于是在,也是充分证明了 它的在实施控制领域的这个成功。 像数字电源和电机控制, 那之前它的占有率是非常非常高的, 一度曾经是百分之百。 那只要是电机和电源的这个工程师, 没有说不知道、不了解C2000的。 当然现在这个世界变了, 所以这个,有一些这个新的情况。 但是呢,我起码从我这个 十多年的这个跟C2000打交道来说, 那你一些高性能的一些, 或者是你要求这个 控制性能非常好的情况下, 还真有些情况是非C2000这个不行。 有一些芯片可以做, 但是做不到这么好的性能。 如果是你说“哎,只要能赚就行了,” 那是很多都是可以做。 好,这个,这是开场白啊。 这开场白有点长。 那我们先切入正题。 呃,这个就是说,我们在 这个C2000的Real-time Control, 它服务的这个各行各业。 主要我们,简单来讲呢 就是数字电源和电机控制。 然后,那这个C2000为什么, 尤其是我们现在新一代的C2000, 它为什么能够实现这个实时控制? 因为现在我们也知道 嵌入式的芯片也在长足地发展。 现在什么主频1G的 这种MCU其实也很常见了。 那C2000我们知道,即使最新款 的C2000,它的主频也只有200兆。 但实际上我们 如果去看一个MCU的话, 只看主频,其实是, 呃,怎么说呢,很片面的。 那我们这里讲的是要实时计算效率。 其实我会向大家 证明就是C2000两百兆, 它的计算能力和计算效率是远远高于 主频哪怕是1G呀 什么这些、这些芯片。 那这个原因呢就是说 我们就是原来的C28核。 后来在C28核的基础 上我们会有一个CLA。 那这个我们之前 熟悉Piccolo、Delfino的 这些系列的工程师也会了解, 这两个结构不是新的结构。 那我们最...现在的377x系列, 就是37xS或37xD。 那S呢就是一个主28和一个CLA。 37xD呢就是两个主28和两个CLA, 那相当于我们叫 双核,实际上它是四核了。 那对于这个主28和每一个 主28核里面有VCU、TMU、FPU。 FPU、VCU呢,之前我们都有。 那这个TMU是 这个新一代C2000里面, 这是新的一个Feature。 它叫三角函数加速器。 这个硬件加速单元是非常强大的, 它会大大提升我们计算这个除法, 三角函数 SIN、COS、ARCTAN这些时间。 那之前我们知道 C2000它有硬件乘法加速器, 所以在我们实时环路 中我们算乘法非常快。 所以尽量在算法里避免 除法,因为除法的Cycle太多。 我们中断里算除法啊这些运算太多 你的主中断时间就过长。 那有了TMU,我们以 计算一个SIN来举例吧。 我们计算SIN,原来我们 如果只用浮点的MPU去算的话, 大概需要20-30个CPU Cycle。 加了TMU运行下速度 算一个SIN是一个CPU Cycle。 所以你可以看到它是 20-30倍的这个速度的提升。 所以你说, 我如果只从主频上提升, 我要提升多少倍才能跟 它的计算效率相关,一样。 同时呢,就是我们 知道AD呀,PWM呀, 它们这些都是直接 和这个CPU进行沟通的, 所以你如果主频到1G 它必然有什么Cache啊, 什么这些预缓存哪等等。 它整个这个流程读写执行 下来,其实它的这个Cycle是很多的。 那这个,我们这个C2000这些特点。 好,主28核。 然后这个 TMU。 这个SIN、 COS、除法、ARCTAN等等。 当然CLA是没有这个TMU单元的, 那我们可以把 我们的code进行合理的分配。 然后这个AD。 那对于377D来说呢, 它是有两种配置。 我可以配置成12位的这个AD, 也可以配置成16位的这个AD。 同时它还有这个delta-sigma, delta-sigma采样 这里现在没显示出来。 然后PWM,高精度PWM。 15这个ps,这叫皮秒。 那我们之前用过高精度的知道, 原来的Piccolo的高精度呢 实际上只有PWM-A可以发出高精度, B就出不来了,所以在 有些应用中是有点蹩脚的。 那现在呢,我们这个 新一代的我们叫PWM Type 4, 就是第四代的这个PWM模块, 它是AB互补,可以发高精度的。 就是互补PWM都是 高精度,这是可以的。 所以,而且这个377D呢, 它这个峰-峰, 这个有三百、三百多皮秒, 所得它的资源是非常丰富的。 OK。这是我们的一个 C2000现在的一个Roadmap。 这个,总体来说呢,就是越下面的, 这个价格越便宜, 这个性能越低一点。 越上面呢,就是稍微贵 一点,但是性能是非常好的。 大家看到这颗芯片37XD, 那我们有377D、379D等等, 37XS,这两个 其实我们仍然是一个, 只不过一个是单核, 也就是一个主28,一个CLA; 一个是双核, 也就是两个主28,两个CLA。 就是这种区别,然后,07、004。 那我们看这块,3C07004, 这些是我们叫这个,就是新一代的, 就是所有我们刚才 讲到这些新的这个指标, 像PWM新的指标,AD新的指标, delta-sigma等等这些新的指标, 在这新一代里边 它们的外设都是一样的。 只不过就是说, 有可能这个有这个24个PWM, 这个可能就有七个或者十个, 就是数量啊、各种Flash 啊这种配置稍微有些差异。 那基本的外设的 这些这个技术都是一样的。 所以这颗芯片004是 我们相对于这个我们低端, 呃,低价位的, 但是它的计算能力呀, 我们就是很直观地去评价的话呢, 可能我们可以认为 它的计算能力和这个 它整个的这个, 就是整个它的能力吧, 是相当于这一块儿芯片的能力。 而且我们后面出来的 所有的芯片全都是带TMU的。 FPU啊,就是全是浮点的。 所以我们以后这个搞控制的工程师, 这个长出了一口气啊, 再也不用搞什么定标啦。 所以这个。因为我们 知道就是其实工程中 大概有,就是控制环路上的 问题大概有七成到八成都是因为定标 或是定标相关引起的 这些各种乱七八糟问题。 所以我们,这个话不能讲, 这以后,可能我们嵌入式 这个做控防环路都不用 搞什么定标了,全都是浮点了。 好。呃,对!然后对, 这里还要跟大家提一下呢, 就是我们在这个377这些,我们 还有一个就是C2000之前可能 做的工作比较少的就是功能安全。 那我们现在在,尤其 就是最上面这个377 37X系列 我们加入了一些功能安全的考量, 以及我们会做一些功能安全的认证。 那后面我们有一些功能 安全需求的这个同志们, 可以去就是用这颗 芯片去做功能安全相关的。 那如果你需要相关 的资料呢,TI现在专门, TI官网上有一个叫 Safe TI的一个页面, 那里面有,就是所有 TI的这个跟功能安全相关的。 那比如说您现在要做IEC61508, 这个IEC60730等等这些认证, 我们都有免费的 这个支持的库给您, 你直接就把这个库加到你的 功能代码里面就可以去做这个认证。 这,稍微提一下。 那当然这个工作量其实不小的。 这是这个。OK,这个37xD系列。 那我们的这个主要的一些Feature, 200兆的主核, 就这两个都是200兆, 然后这个主28 有FPU、TMU等等、等等。 然后这个12位这个, 这个刚才跟Linda讲的一样, 3.5MSPS的这个AD,这个。 好。然后这个要提到 就是有一个四个独立的, 就是最多是可以16位的这个AD。 那我们之前看到我们Piccolo什么, 它有什么A组、B组两组这个AD, 但实际上它的转换模块只有一个。 那我们现在是四个转换模块。 真的就是完全的,如果是 四个转换模块同一时刻去采的话, 就是真正上同一时刻采四路的信号。 那所以这个对于实时 控制系统,它一点延迟都没有。 不像原来是一个模块, 它是,其实是分着采的, 排着队采,这个。 然后呢就是像 我们有这个窗口比较器, 那刚才这个Linda讲的时候 也提到了我们这个比较模块。 那除了有正负的,原来 我们只能只比这个半边嘛, 现在有正负,同时使用窗口。 这个窗口呢,就是 刚才她说的就是Blanking, 就是我有一些地方,我 确定这个地方肯定就是干扰, 我不希望它触发这个方向, 那么我就可以把它 这个,相当于我就不看, 把它滤掉。然后 相当于就是我开一个窗口, 只在这个窗口里面 我去看我想要的信号去比。 窗口比较器。 然后这个sigma-delta的 这个我们叫解调滤波器。 就是我们 sigma-delta,我们了解的知道 它需要一个前端调制的环节, 后端还需要一个解调的环节, 那我们这里面芯片 就放了解调的环节。 OK。然后就是PGA啊 等等这个模拟前端啊, 这个也是得到了大幅的改善。 因为我们之前这个在Piccolo 05系列 有一些这个内部 的模拟运放在里面。 但实际上那个呢, 用起来呢,不够灵活。 那就我们现在也是 对这个模拟运放前端 集成进去的做了 一个比较大的改进。 如果是呢, 大家想评估的话呢, 我们现在就是Control Card啊,还有它的Docking啊这些, 都可以这个大家 去申请,或者是购买。 那它的封装,这个, 我们看得不大清楚啊, 就是300... 337-Pin的, 还有176-Pin的。 这个相关的这个数据呢, 大家可以去官网 上仔细去查它的那个pin。 然后就是004。 那004和377比呢, 其实它的主核啊, 以及这些主要的外设 它的这些这个技术啊, 这个采用的技术都是一样的。 只不过是有些裁剪。 呃,004呢是100兆。 这个,七个 这个芯片内的这个PGA。 七路。然后这个PMBUS啊,这个。 然后这里提到的就是,是原 来06x系列这个芯片能耗的一半。 它的能耗,因为 采用了这个不同的工艺, 它的能耗,就是功耗降低了。 就是单颗芯片的这个功耗。 三组这个12位的这个AD, 三个AD模块,七个窗口比较器, 四个delta-sigma的这个解调模块。 然后这个FSI也有 就是高速窗口通讯。 那其实我们的FSI还有EMIF, 那其实这些个设计呢 就是可以,就是让大家在芯片级 对实时数据进行高速通讯。 所以这个,一个呢是有一些系统设计 就需要这样多芯片的高速通讯, 还有一个需求呢就是功能安全。 那我们可能有一颗主芯片去控, 另外一颗主芯片去检查 这颗芯片是不是有问题。 那这是功能安全的一些系统架构。 OK,那同样的,它的 这些Control Card啊等等这些 都已经ready了, 大家可以去申请、去购买。
好,大家好!这个, 我们好像还沉浸在上一节里面。
现在我们...反正这一节有点延续 性,我们都是C2000的一些东西。
那这个刚才我也听了 大家提到的一些问题,
像什么绝对位置传感器啊什么这些,
那我们这节多少会有一点涉及。
那这节我们讲的呢 就是这个高速的电流环。
那这个,不知道 这个标题有没有写啊。
因为我们上一节这个严重的标题党,
就是一微秒电流环。
然后这个,然后里面看到 一微秒电流环讲得其实不多。
那就我们这节 主要讲的是一微秒电流环。
那这个、这个不是标题党啊,
这个里面就是讲 一微秒电流环怎么实现的,
为什么能够实现一微秒的电流环。
所以这个, 那这个也是跟我们的
这个高端的电机应用,
就是我们伺服, 高精度伺服以及这种
快速响应的这种电机控制 系统非常相关的一些技术。
这也是我们TI, 就是在这个最近
新推出的这一系列产品里面,
这个目标非常明确的
去实现这种高性能 电机控制的这个、这些芯片。
专门针对这个应用做出 了芯片的一些设计和调整。
那这个,大家如果是 这个了解C2000的话呢,
可以知道就是C2000这个芯片
就是专门为实时控制系统而设计的。
而且它这个二、三十年 的这个整个这个历程来说,
相当于是在,也是充分证明了
它的在实施控制领域的这个成功。
像数字电源和电机控制,
那之前它的占有率是非常非常高的,
一度曾经是百分之百。 那只要是电机和电源的这个工程师,
没有说不知道、不了解C2000的。
当然现在这个世界变了,
所以这个,有一些这个新的情况。
但是呢,我起码从我这个
十多年的这个跟C2000打交道来说,
那你一些高性能的一些,
或者是你要求这个 控制性能非常好的情况下,
还真有些情况是非C2000这个不行。
有一些芯片可以做, 但是做不到这么好的性能。
如果是你说“哎,只要能赚就行了,”
那是很多都是可以做。
好,这个,这是开场白啊。
这开场白有点长。 那我们先切入正题。
呃,这个就是说,我们在 这个C2000的Real-time Control,
它服务的这个各行各业。
主要我们,简单来讲呢 就是数字电源和电机控制。
然后,那这个C2000为什么,
尤其是我们现在新一代的C2000,
它为什么能够实现这个实时控制?
因为现在我们也知道
嵌入式的芯片也在长足地发展。
现在什么主频1G的 这种MCU其实也很常见了。
那C2000我们知道,即使最新款 的C2000,它的主频也只有200兆。
但实际上我们 如果去看一个MCU的话,
只看主频,其实是, 呃,怎么说呢,很片面的。
那我们这里讲的是要实时计算效率。
其实我会向大家 证明就是C2000两百兆,
它的计算能力和计算效率是远远高于
主频哪怕是1G呀 什么这些、这些芯片。
那这个原因呢就是说 我们就是原来的C28核。
后来在C28核的基础 上我们会有一个CLA。
那这个我们之前 熟悉Piccolo、Delfino的
这些系列的工程师也会了解,
这两个结构不是新的结构。
那我们最...现在的377x系列,
就是37xS或37xD。
那S呢就是一个主28和一个CLA。
37xD呢就是两个主28和两个CLA,
那相当于我们叫 双核,实际上它是四核了。
那对于这个主28和每一个 主28核里面有VCU、TMU、FPU。
FPU、VCU呢,之前我们都有。
那这个TMU是 这个新一代C2000里面,
这是新的一个Feature。
它叫三角函数加速器。
这个硬件加速单元是非常强大的,
它会大大提升我们计算这个除法,
三角函数 SIN、COS、ARCTAN这些时间。
那之前我们知道 C2000它有硬件乘法加速器,
所以在我们实时环路 中我们算乘法非常快。
所以尽量在算法里避免 除法,因为除法的Cycle太多。
我们中断里算除法啊这些运算太多
你的主中断时间就过长。
那有了TMU,我们以 计算一个SIN来举例吧。
我们计算SIN,原来我们 如果只用浮点的MPU去算的话,
大概需要20-30个CPU Cycle。
加了TMU运行下速度 算一个SIN是一个CPU Cycle。
所以你可以看到它是 20-30倍的这个速度的提升。
所以你说, 我如果只从主频上提升,
我要提升多少倍才能跟 它的计算效率相关,一样。
同时呢,就是我们 知道AD呀,PWM呀,
它们这些都是直接 和这个CPU进行沟通的,
所以你如果主频到1G 它必然有什么Cache啊,
什么这些预缓存哪等等。
它整个这个流程读写执行 下来,其实它的这个Cycle是很多的。
那这个,我们这个C2000这些特点。
好,主28核。 然后这个 TMU。
这个SIN、 COS、除法、ARCTAN等等。
当然CLA是没有这个TMU单元的,
那我们可以把 我们的code进行合理的分配。
然后这个AD。 那对于377D来说呢,
它是有两种配置。 我可以配置成12位的这个AD,
也可以配置成16位的这个AD。
同时它还有这个delta-sigma,
delta-sigma采样 这里现在没显示出来。
然后PWM,高精度PWM。
15这个ps,这叫皮秒。
那我们之前用过高精度的知道,
原来的Piccolo的高精度呢 实际上只有PWM-A可以发出高精度,
B就出不来了,所以在 有些应用中是有点蹩脚的。
那现在呢,我们这个 新一代的我们叫PWM Type 4,
就是第四代的这个PWM模块,
它是AB互补,可以发高精度的。
就是互补PWM都是 高精度,这是可以的。
所以,而且这个377D呢,
它这个峰-峰, 这个有三百、三百多皮秒,
所得它的资源是非常丰富的。
OK。这是我们的一个 C2000现在的一个Roadmap。
这个,总体来说呢,就是越下面的,
这个价格越便宜, 这个性能越低一点。
越上面呢,就是稍微贵 一点,但是性能是非常好的。
大家看到这颗芯片37XD,
那我们有377D、379D等等,
37XS,这两个 其实我们仍然是一个,
只不过一个是单核, 也就是一个主28,一个CLA;
一个是双核, 也就是两个主28,两个CLA。
就是这种区别,然后,07、004。
那我们看这块,3C07004,
这些是我们叫这个,就是新一代的,
就是所有我们刚才 讲到这些新的这个指标,
像PWM新的指标,AD新的指标,
delta-sigma等等这些新的指标,
在这新一代里边 它们的外设都是一样的。
只不过就是说, 有可能这个有这个24个PWM,
这个可能就有七个或者十个,
就是数量啊、各种Flash 啊这种配置稍微有些差异。
那基本的外设的 这些这个技术都是一样的。
所以这颗芯片004是 我们相对于这个我们低端,
呃,低价位的, 但是它的计算能力呀,
我们就是很直观地去评价的话呢,
可能我们可以认为 它的计算能力和这个
它整个的这个, 就是整个它的能力吧,
是相当于这一块儿芯片的能力。
而且我们后面出来的 所有的芯片全都是带TMU的。
FPU啊,就是全是浮点的。
所以我们以后这个搞控制的工程师,
这个长出了一口气啊, 再也不用搞什么定标啦。
所以这个。因为我们 知道就是其实工程中
大概有,就是控制环路上的 问题大概有七成到八成都是因为定标
或是定标相关引起的 这些各种乱七八糟问题。
所以我们,这个话不能讲, 这以后,可能我们嵌入式
这个做控防环路都不用 搞什么定标了,全都是浮点了。
好。呃,对!然后对, 这里还要跟大家提一下呢,
就是我们在这个377这些,我们
还有一个就是C2000之前可能 做的工作比较少的就是功能安全。
那我们现在在,尤其 就是最上面这个377 37X系列
我们加入了一些功能安全的考量, 以及我们会做一些功能安全的认证。
那后面我们有一些功能 安全需求的这个同志们,
可以去就是用这颗 芯片去做功能安全相关的。
那如果你需要相关 的资料呢,TI现在专门,
TI官网上有一个叫 Safe TI的一个页面,
那里面有,就是所有 TI的这个跟功能安全相关的。
那比如说您现在要做IEC61508,
这个IEC60730等等这些认证,
我们都有免费的 这个支持的库给您,
你直接就把这个库加到你的 功能代码里面就可以去做这个认证。
这,稍微提一下。 那当然这个工作量其实不小的。
这是这个。OK,这个37xD系列。
那我们的这个主要的一些Feature,
200兆的主核, 就这两个都是200兆,
然后这个主28 有FPU、TMU等等、等等。
然后这个12位这个, 这个刚才跟Linda讲的一样,
3.5MSPS的这个AD,这个。
好。然后这个要提到 就是有一个四个独立的,
就是最多是可以16位的这个AD。
那我们之前看到我们Piccolo什么, 它有什么A组、B组两组这个AD,
但实际上它的转换模块只有一个。
那我们现在是四个转换模块。
真的就是完全的,如果是 四个转换模块同一时刻去采的话,
就是真正上同一时刻采四路的信号。
那所以这个对于实时 控制系统,它一点延迟都没有。
不像原来是一个模块, 它是,其实是分着采的,
排着队采,这个。
然后呢就是像 我们有这个窗口比较器,
那刚才这个Linda讲的时候 也提到了我们这个比较模块。
那除了有正负的,原来 我们只能只比这个半边嘛,
现在有正负,同时使用窗口。
这个窗口呢,就是 刚才她说的就是Blanking,
就是我有一些地方,我 确定这个地方肯定就是干扰,
我不希望它触发这个方向,
那么我就可以把它 这个,相当于我就不看,
把它滤掉。然后 相当于就是我开一个窗口,
只在这个窗口里面 我去看我想要的信号去比。
窗口比较器。
然后这个sigma-delta的 这个我们叫解调滤波器。
就是我们 sigma-delta,我们了解的知道
它需要一个前端调制的环节,
后端还需要一个解调的环节,
那我们这里面芯片 就放了解调的环节。
OK。然后就是PGA啊 等等这个模拟前端啊,
这个也是得到了大幅的改善。
因为我们之前这个在Piccolo 05系列
有一些这个内部 的模拟运放在里面。
但实际上那个呢, 用起来呢,不够灵活。
那就我们现在也是 对这个模拟运放前端
集成进去的做了 一个比较大的改进。
如果是呢, 大家想评估的话呢,
我们现在就是Control Card啊,还有它的Docking啊这些,
都可以这个大家 去申请,或者是购买。
那它的封装,这个, 我们看得不大清楚啊,
就是300... 337-Pin的,
还有176-Pin的。
这个相关的这个数据呢,
大家可以去官网 上仔细去查它的那个pin。
然后就是004。 那004和377比呢,
其实它的主核啊, 以及这些主要的外设
它的这些这个技术啊, 这个采用的技术都是一样的。
只不过是有些裁剪。
呃,004呢是100兆。
这个,七个 这个芯片内的这个PGA。
七路。然后这个PMBUS啊,这个。
然后这里提到的就是,是原 来06x系列这个芯片能耗的一半。
它的能耗,因为 采用了这个不同的工艺,
它的能耗,就是功耗降低了。
就是单颗芯片的这个功耗。
三组这个12位的这个AD,
三个AD模块,七个窗口比较器,
四个delta-sigma的这个解调模块。
然后这个FSI也有 就是高速窗口通讯。
那其实我们的FSI还有EMIF,
那其实这些个设计呢 就是可以,就是让大家在芯片级
对实时数据进行高速通讯。
所以这个,一个呢是有一些系统设计
就需要这样多芯片的高速通讯,
还有一个需求呢就是功能安全。
那我们可能有一颗主芯片去控,
另外一颗主芯片去检查 这颗芯片是不是有问题。
那这是功能安全的一些系统架构。
OK,那同样的,它的 这些Control Card啊等等这些
都已经ready了, 大家可以去申请、去购买。
手机看
扫码用手机观看
 视频简介
视频简介
如何在C2000上实现小于1微秒的电流环的设计(1)
所属课程:TI EP day 研讨会课程
发布时间:2017.12.06
视频集数:26
本节视频时长:00:14:48
TI EP day 研讨会课程合辑。


 未学习 Simplelink™ MCU平台介绍以及Simplelink™ Academy深度学习
未学习 Simplelink™ MCU平台介绍以及Simplelink™ Academy深度学习
 未学习 TI嵌入式产品总览
未学习 TI嵌入式产品总览
 未学习 基于 AM335x 国网充电桩 HM& 计费模块和采集系统 2.0 终端解决方案
未学习 基于 AM335x 国网充电桩 HM& 计费模块和采集系统 2.0 终端解决方案
 未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (1)
未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (1)
 未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (2)
未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (2)
 未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (3)
未学习 C2000 F2004x 在实时控制系统中的新特性介绍 (3)
 未学习 MSP430 USS 超声波传感 和 LEA 低功耗加速 (1)
未学习 MSP430 USS 超声波传感 和 LEA 低功耗加速 (1)
 未学习 MSP430 USS 超声波传感 和 LEA 低功耗加速 (2)
未学习 MSP430 USS 超声波传感 和 LEA 低功耗加速 (2)
 未学习 如何在C2000上实现小于1微秒的电流环的设计(1)
未学习 如何在C2000上实现小于1微秒的电流环的设计(1)
 未学习 如何在C2000上实现小于1微秒的电流环的设计(2)
未学习 如何在C2000上实现小于1微秒的电流环的设计(2)
 未学习 77GHz 单芯片毫米波产品介绍
未学习 77GHz 单芯片毫米波产品介绍
 未学习 基于 AM57xx 和 AMIC110-120 工业现场总线 EtherCAT 主从解决方案
未学习 基于 AM57xx 和 AMIC110-120 工业现场总线 EtherCAT 主从解决方案
 未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(1)
未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(1)
 未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(2)
未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(2)
 未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(3)
未学习 基于C55xx C674x 和 PCM1864 语音识别 前端语音处理解决方案(3)
 未学习 基于AM57xx 和 DLP4500 结构光原理的嵌入式 3D 扫描仪
未学习 基于AM57xx 和 DLP4500 结构光原理的嵌入式 3D 扫描仪
 未学习 TI蓝牙5.0方案介绍以及CC2640R2F动手实验
未学习 TI蓝牙5.0方案介绍以及CC2640R2F动手实验
 未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (1)
未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (1)
 未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (2)
未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (2)
 未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (3)
未学习 应用 SimpleLink Wi-Fi 平台设计安全超低功耗的产品 (3)
 未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (1)
未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (1)
 未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (2)
未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (2)
 未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (3)
未学习 传感器到云端,以及低功耗广域网IoT网络及其应用 (3)
 未学习 基于小于1GHz和低功耗蓝牙BLE双频产品CC1350,设计创新的本地和云端连接产品(1)
未学习 基于小于1GHz和低功耗蓝牙BLE双频产品CC1350,设计创新的本地和云端连接产品(1)
 未学习 基于小于1GHz和低功耗蓝牙BLE双频产品CC1350,设计创新的本地和云端连接产品(2)
未学习 基于小于1GHz和低功耗蓝牙BLE双频产品CC1350,设计创新的本地和云端连接产品(2)
 未学习 CC1310详细介绍以及软件开发教程
未学习 CC1310详细介绍以及软件开发教程


























