
汽车
最新课程
- 电源认证-线上直播答疑-第1期
- TI 高精度实验室 - 数据转换器:使用精密ADC测量RTD
- 如何利用高速比较器优化系统设计
- TPS546D24S 和 TPSM8S6C24 中的扩展安全功能
- TI 高精度实验室 - 仪表放大器
- 高侧开关深入研讨
- TI 高精度实验室 - 微控制器 (MCU)
- TI 高精度实验室 - CPU内核
- 三种直流/直流控制模式的实际比较
- 电源多路复用器深度培训
热门课程
ADAS 主流系统架构介绍与设计挑战-3



我们 FPD-Link 产品
在 ADAS 系统上的一个应用
这里我们先看一下这个图
那这个是我们 FPD-Link
在 ADAS 产品上
就摄像头或者那个雷达连接上的
所有的一个主流产品的一个介绍
那我们这里有三列
第一列是我们的那个发送器
就是放在我们摄像头
或者说那个雷达模块端的
那他就负责把我们的那个并行数据
转成一个串行的同轴或者双绞
然后进行一个传输
然后右边两列呢
是我们的接收的那个芯片
那这两个主要是放在我们的一个 ECU 上
把我们的串行数据再回转为一个并口
然后再给到我们的处理器做一个处理
然后这个纵轴呢是我们的像素
那我们最低是 100 万像素
然后最高目前是到 200 万像素
这样一个水平
然后我们支持的接口也有很多
那我们有那个 DVP 或 656 这样的并口
那也支持这种 MIPI 这样串口
然后的话这里的任意一颗
任何任意一颗这个发送器
那都可以跟右边两列任意一颗
这个接收器做连接
那比如说我的那个 sensor 是并口的
比如说那个 YUV 的
那我可以用一颗 933
把这个并口转成那个串行的同轴
但是呢我的那个接收器我是 mipi 的
那我可以就用这个 933
那搭配一个 936 这样来用
那就可以使得
我收到这个 936 收到了那个信号以后
我就可以把这个信号
转成那个 mipi 给到我们的处理器
我们大家可以看到哈
这个 934 这个系列它支持一个输入
然后我们那个 954 跟 936
它支持两个这个输入
那它就可以同时接收两个摄像头数据
然后把数据整合到一个 mipi 上
去做个传输
然后我们最右边呢
这个就是我们的那个 960 964
那个这个是我们专门给
这种环视全景模块设计的一个接收器
那它一个芯片就可以直接连接四个摄像头
连接四个 比如四个 933
然后呢我们可并且呢
把这四个 933 的那个数据
整合到一条或者两条 mipi 上去做传输
给到我们的 ECU
那下面这是一个
我们的每一个芯片的具体的功能
比如说这个自适应均衡
那是每个器件都有的
然后那个同轴电缆供电
那也是每个器件都会有这样的一个功能
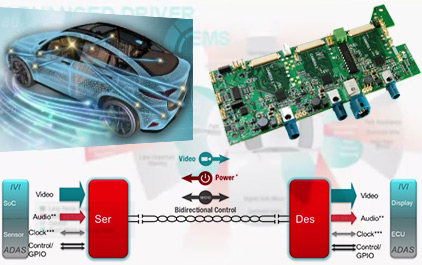
那往下我们自己再简单重温一下
我们的这个摄像头
一个系统的框图
那左边这个摄像头
那我们的 sensor 采了数据以后
那通过我们 933 这个串行器
变成一个串成信号给到这个同轴电缆
经过同轴以后
那我可以在收端呢
通过那个 934
把它解回那个并口 YUV 信号
然后给到我们的处理器
然后同时的话处理器
可以通过 I2C 或 IO 口
把这个控制信号
也是通过同一跟同轴电缆
给回传到我们这个摄像头
来去控制那个摄像头各个参数
然后同时呢我这个这边的那个主机
还可以通过一个 POC 的网络
把我们这个电源
也从这根电缆上传输
然后给到我们这个摄像头给它供电
那这样我用一根同轴线
就可以实现这个视频实现电源
还有一个双向的控制信号的一个传输
那最高呢支持到 200 万像素 30 帧
或者 100 万像素 60 帧
然后线缆的话最高我们能达到15米
那刚刚我们讲的那个叫双向控制
那你比如说 I2C 那我们就能够达到
400K 那个高速 I2C 控制
那同时也这个也有我们前面的功能
包括那个自适应均衡
包括我们那个解串器的一个抖频
那都能够帮助各位能够提高
我们系统的一个可靠性跟稳定性
然后下面这一页我们就简单总结了一下
我们这个 FPD-LINK 产品的
一个重要的一些创新点
那比如说我可以用
我可以除了摄像头以外
我还可以去支持包括雷达
普通的那个雷达 激光雷达
还有那个时间的传感器
比如说超声传感器这样一个连接
就应用场合非常广
就不仅限于说摄像头
那同时呢我们还可以有那个
精确的一个 sensor
就我们摄像头
或者说我们那个雷达一个同步机制
我们后面会讲到
然后第三个是我们可以通过
一个单的芯片就可以实现那个数据归集
把多个摄像头多个 sensor
然后同步全整合在一起
然后再给到我们的那个 ECU
那这个就能够帮助大家能够
实现我们的那个功能安全的一个需求
最终的话那由于我们的整合
那个集成度非常高
所以说能够帮助大家能够节省 BOM 成本
节省系统成本
所以这个就是我们 FPD-LINK
一个大致的介绍
那下面呢我们会
给各位讲一下我们
几个比较有意思的特性
那第一个是我们 FPD-LINK3
这种 ADAS 的串行器里面
它有几个时钟的模式
那这里我们先看一看
我们传统的一个 sd 系统
就我们一个串并并串转换
这样的一个系统的结构
那我们可以看一下
这里这个图左边是一个串行器
那所谓串行器就我们把这个并行的数据
转成一个串行传到那个另外一边
那这边呢就有个解串器
解串器就是把这个串行的数据再转为并行
那给到我们那个处理器做个处理
那我们怎么把这个数据变成一个串行
我们必须有一个时钟
这个时钟是负责去
计时我这个数据
就是说负责去对齐我这个数据的
那我们每一个 一般来说
我们每一个时钟周期
就会对应一组并行数据
那我们这个并转串
都是通过这个时钟
做一个计时来做一个传输的
然后到了这个解串
我们会先从这个串行的数据上
我先会把时钟提取出来
然后再用这个时钟
再去采样我这个串行的数据
同时把这个并口去
然后再把这个数据转成并口再输出
所以说在这 sd 就并并串串并转换的
系统里面我们的时钟其实十分关键的
如果时钟有些什么问题
那可能会导致我们这个系统的
一个稳定性的一个变化
那我们往下具体一点
我们可以看看这个 FPD-Link
我们以 913 933 为例
这个串行器我们怎么样把那个并口
并行数据变成一个串行数据
那这边是个数据
比如我们 sensor
它传来了十个比特的一个并行数据
同时有一个时钟
那我们每一个时钟就会对应一个数据位
那我们就通过这个时钟
去锁存每一个那个周期的数据 把它锁下来
然后呢我们同时这个芯片
会把这个时钟乘以 14 放大 14 倍
然后将我刚刚这十个锁存的数据
以及四个额外的那个控制数据
打包成 14 比特帧
然后用这个 14 倍的时钟往外发
那这个就是我们的一个并转串的原理
就先把那个并行的数据转存下来
然后再加上我们那个额外的控制数据
然后呢把我们的时钟加倍加 14 倍
再用这个时钟再把这个并行数据
通过移位的方式这样移出来
变成一个串行数据这么发送
那这里的话我们可以看
我们就测了一下波形
下面这个波形是我们刚刚说
那个 PCLK 就我们这个时钟的一个波形
然后上面这个呢
就我们经过那个并行转串行以后
它出来的一个数据的一个波形
那我们把它个测那个眼图
那我们可以看到
如果说我们输入的时钟非常干净的话
那我们这个输出的数据
也会是质量会比较好
那这个我们可以看这个眼图
眼睛张开的十分大
所以那基本上不会有什么判断出错
或者说噪点这种情况的出现
那往下这个呢就是我们传统的
一个摄像头的一个叫时钟的连接模式
那么传统方式可能是说
我这个sensor 这边是那个串行器
那我们可能会用一个外部的晶振
或者说 sensor 内部会有
就直接去给那个 sensor
然后呢然后 sensor 会
用它内部的一个时钟
或者说通过这个时钟
来给这个我们串行器
比如 913 一个像素时钟做一个同步
那比如说我们这个 OV10640
那他就可以接受外部时钟
然后同时把这个时钟经过那个锁相以后
再给到我们这个并行输出到我们 913
那如果这种情况下
如果我们这个 sensor 的时钟很差的话
那就会导致我们这个串并的转换
以及传输会出现一些出错的情况
那我们看这种情况
那这个是 sensor 给到
sensor 给到我们那个串行器的一个时钟
那我们可以从跟前面几页那个时钟对比
它这边变粗了
其实就是因为它抖动变得更大
那其实因为它这个时钟频率比较低
所以抖动变大
其实我们看起来其实还好
但是呢由于我们要把这个
那个十比特并行数据
变成串行的十四比特的数据
那如果说我们这个输入时钟
抖动比较大的话
那就会对我们那个
高速串行的影响就很严重
那这个的话就是我们
通过我们这个输入信号
通过这个时钟乘以 14
在往外打的一个串行数据
那我们可以看到由于
这个时钟的那个抖动变大
我们这个串行数据的眼图
就眼睛变得更窄更小
那如果这个眼图
我们再经过一个长距离线缆传输
那到我们接头端可能就会效果就更差
那有可能就是我们的
那个均衡也没办法把它给恢复
那这样的话就会导致说我们的
传输就会出现那个错误
导致说比如说花屏或者滚屏
或者说那个那个黑屏
这样的一个情况
那我们怎么去解决这个问题
有没有几种方法
第一个是叫那个外部时钟模式
那我们可以用一个比较好的一个晶振
比如有源晶振
然后我们把用这个晶振
把这时钟一个干净的时钟
给到我们这个串行器
然后呢串行器再把它时钟
给到我们那个 sensor
sensor 再根据我串行器这个时钟
时钟同步把这个 data 给打出来
然后我们这个串行器呢我就会用
我就直接用这个
我就直接用这个有源晶振的时钟
来去串行化我这个数据
我就不会再去用这个脏的时钟
去做一个这样的串行化
那这个就是我们的一个框图
那这个是我们刚刚说那个
外接晶振的一个时钟
那这个是一个很干净的一个时钟
我们就直接给到这个串行器做一个串行
然后至于 sensor 给过来那个时钟
我只作为一个数据锁存
所以用这种方式的话
我们就可以保证我们这个在
并串转换过程中
这个时钟是绝对是干净的
然后从而保证我们的那个串行数据
那不会受影响
那我们这里就是说可以有个对比
那如果我们使用传统的时种模式
用一个抖动很大的一个 PCLK
作为一个并串转换的时钟参考
那这样的话它的那个眼图非常差
那如果我们使用这个
我们使用这种那个外部时钟模式
我们用一个干净的时钟源给到我们
那个直接给到我们串行器做一个转换
那这样我们整个眼图就非常漂亮
这样就可以保证我们整个
传输的一个质量跟可靠性
那除了我们前面讲到的
那种外部时钟模式以外
那我们的最新的这个 953 系列
还支持叫同步时钟模式
那这个什么意思呢
就我可以从主机端
由处理器去发送一个时钟
给到我们那个解串器
然后有解串器
再通过这同轴
把这个时钟给到这个 953
那这样的话我就可以
把这四个 953 比如这个全景
我们就可以把这四个953
全部同步在一起
并且他这边不需要额外再放时钟
我们可以看这个具体的框图
OK 那这边摄像头的 953
然后我们的接收是 954
那这里的话我可以通过这个处理器
处理器通过发送一个时钟
然后通过这个同轴电缆
传到我们的摄像头端
然后摄像头端的话
我 953 再把这个时钟解出来
然后再给到 sensor 做一个同步
那这样的好处是说
只要我这个处理器的时钟足够好的话
那我们就不会有前面所说的
那个抖动的问题
然后同时的话
我在我这个系统
也不再需要外部再放一个晶振
这样呢我自己节省了一个空间跟成本
那同时呢也提高了
我们这个系统的一个可靠性
所以这个是
关于时钟模式的一个讲解
然后第二个呢
是关于这个帧同步发生器的一个功能
那这个是主要针对我们
那个环视的应用上的一个功能
那我们看这样一个场景
这里是个环视系统
那它有四个摄像头
那分别通过这个串行器
比如 913 933 这样发送
通过这个同轴
发送到我们的接收端
然后再给到我们的cpu 做个处理
但是呢这四个摄像头
它的时钟可能是都是自己在跑的
他不同步的 那就有一个问题
可能这四个摄像头
他拍的每一帧的时间是不同步的
那当我合成的时候呢
我只能够说把那个相邻的帧合在一起
你比如说我要合成这帧
我只能把这个红的
跟这个蓝的直接拼一块
那这样就可能导致我这个图像的撕裂
那就导致会造成我们的这个
我们的这个整个画质都不好
所以为了去避免这种情况
我们一般都会使用这种同步的方式
那第一种同步方式
就是说我可以比如 960 跟 935
我可以通过这个处理器
去发送一个同步的时钟给到 960
然后由 960 呢
再通过这个同轴电缆
把这个时钟给到四个摄像头
这样的话我们就可以实现
我可以实现四个摄像头时钟同步
并且我每个摄像头还不需要
再额外再放一个晶振
这是通过处理器这么去发送
那同时呢其实我们还有两种方法
那第一种呢就是说我们用这个
我们比如我们 960 跟 964
我们这个解串芯片
我们芯片内部呢
会有一个叫那帧同步的一个发生器
那你只要设定好以后
我就可以让它定时发一个脉冲
那这个脉冲通过这个同轴
传到那个摄像头
然后让摄像头再传到 sensor
然后这样的话可以我们可以让
我们可以让这个每一个 sensor
然后每一帧都在同一个时刻开始采样
那这叫帧同步发生器
那用这种方式的话
那我们可以实现最好的效果
就是说延时只有不超过600个纳秒
然后那个那个通道间的差异呢
不超过400个纳秒
但如果说我不想用这个
那也行那我可以说用那个处理器
来给一个脉冲
然后这个脉冲通过 IO 口来去做同步
这样也可以
那这是第二种方式
用个外部那个脉冲处理器
我发送一个脉冲
那这个脉冲呢
通过这个同轴电缆回传到摄像头
然后让摄像头的
摄像头这个串行器
再把这个脉冲发到给那个 sensor
然后让 sensor 每帧去同步
那这样做也 OK 但这样做的话
我们这个延时呢就会稍微大一点点
那就没有我们的
内部的发生器性能那么好
但这两个都是一个比较好的方法
当然如果我们还有第三种办法
这里没画出来
那就是用 I2C
那同样我可以通过 I2C
去发一个这个同步信号
然后再让这个串行器
如果 sensor 是 I2C 接口的话
我可以通过串联器把这 I2C 解出来
然后让那个 sensor 同步
这样也可以实现
这个摄像头的帧同步的方式
所以说我们这个系列 954
936 跟 964 960 那都可以支持
这三种的那个帧同步方式
包括内部的那个发生器
或者说外部的 IO 口
或者外部 I2C
那我们可以根据我们的
那个实际的应用情况去做一个选择
然后刚刚我们讲到全景模块的一个功能
那我们可以看一看
那对于全景模块
那我们是怎么实现这个数据的传输的
那比如说这个 上面这个
我们有四个摄像头
那如果这四个摄像头的话
这个帧率是一样的话
那我可以直接把那个 A 跟 B
放在第一个根来传
然后 C 跟 D 放在第二个 MIPI 来传
我们也可以说 我只用一个 MIPI 口
然后把 A B C D 全都放在这个传也行
那同时的话
如果我希望这两个 MIPI
能传输一样的 copy 的数据那也行
那我可以把 ABCD 放在同一个地方传
然后第二个口呢
就是传跟第一口一模一样的数据
这样我就可以实现
给到如果有两个接收处理器
我就可以让两个处理器
同时接收一样的数据
那同时呢这个摄像头我们也支持说
你帧率不一样的那个摄像头
我们比如说你一个车的前视
可能那个分辨率要高一点
可能后视分辨率没那么高
那么我们就可以说
用这种方式也能够支持
那前面讲的是关于这个
时钟跟同步的一个介绍
那后面呢我们会讲一讲
我们的这个 FPD-Link
关于一些诊断的一个功能
我们先看看这个框图
那这个又是我们前面所说的
一个典型的一个 FPD-Link
我们的那个摄像头跟主机
或者说主机跟屏幕的一个典型的框图
那他就 sensor 通过串行器发送
然后这边通过解串解出来
那如果我们遇到问题
我们一般会看什么
我们一会看可能做这个 sensor 的数据
我们中间传输的一个介质
接收数据还有说我们 I2C 的一个总线
还包括我们那个锁定
我们那个自检等等这些功能
我们都会去看
那刚刚我们这个画圈的
就是让我们系统遇到问题
那我们一般都会在
以下这几方面去做一个观测
然后去看是出了什么样的问题
然后到这一页呢
我们介绍一下
关于这个 FPD-Link
几个那个诊断的功能
那第一个功能是那个 Lock 引脚
那我们刚刚前面讲到我们的
那个我们这是一个并转串
再由串再转并的这样一个系统
那我们的那个接收器
我们的接收器会从这个串行数据
先把时钟给解出来
然后再用时钟再去解我们对应的数据
那如果所以我们在我们的接收器上
会有一个 Lock 这样一个信号
那如果我们接收器
能够正确地解出我们
从串行器发过来的数据的话
那我们这个接收器的 Lock 就是高
如果说那个接收器这边解串有问题
他锁不住这个时钟
那我们这个 lock 就会低
所以一般来说
如果我们用 FPD-Link 这个产品
如果我们遇到说什么显示不稳定
或者各种问题 我们第一个
我们可以就先看一下那个 Lock 引脚
那到底它是高还是低?
有没有不稳定
第二个是那个 LINK DETECT
那这个呢就是我们的接收器
去检测我们这个中间那个电缆是否完好
就有没有那个连接
那我们可以通过这个寄存器
去读取它的状况
到底这个连接正不正常
那个线有没有破损都能看得到
那第三个呢就是那个内建的自检
那它可以让 它可以通过一个命令
让我这个串行器
发送一个已知的序列给到我们那个解串器
然后解串器再通过进行一个比对
那通过这种方式来验证
我这个传输的过程有没有出现比特错误
那如果有比特错误
那他会把它存到我们寄存器里面
那各位就可以通过这个寄存器 I2C 去读取
从而就通过这个结果 我们可以去验证
我们可以测试这个传输链路的一个可靠性
然后第四个呢
就那个内建的一个图案生成器
就我们绝大部分的芯片
我们内部都有一个可以生成一个图案
比如说彩条 比如说纯色
比如说灰阶这样的一个信号
那这样就可以可以帮助我们
去可以帮助我们
就是说去除我们输入源的一个影响
而用我们芯片直接生成一个图案
往外去发送
然后可以让我们去分段去检测一个情况
那比如说我这边发现呢这个图像不对
那我可以说先把这个 source 断开
我直接用这个发送器去生成一个彩条往外打
如果说这个发送器我弄个彩条往外输
他这边是正常的
那证明从我这个发送器
到我这个接收这边都是好的
那我就需要检查
这个 sensor 跟我这个发送器
之间的连接是不是有问题
它给帮助我们快速去定位那个
问题在哪一部分
那最后一个呢是那个 CMLOUT 跟 GPIO
CMLOUT 就是说我们会把这个串行数据
把那个回传的第一屏给去掉以后
重新在这个口发出来
那我们可以通过这个口
拿示波器测量这个口这个信号
这样来去判断
我这个传输的眼图到底是好还是不好
所以这个是我们这个 FPD-Link
这个六种我们的一个诊断的功能
这个最常见的功能
那往下呢这个是我们列出了
我们这个 FPD-Link 芯片里面
那我们为了实现那功能安全
那我们有一共有 14 种
这个内建的一个诊断功能
那绿色这个就前面的 12 种呢
都是就是系统只要一上电
它就会自己一直在运行的
那就你不需要去启动它
比如说我们的那个
线缆的那个出错检测
或者说那个 EQ 调节
或者说我们那个刚刚说的
时钟锁定的一个判断
还有那个包括什么 CRC 的校验
那这些它都是只要你一上电
他就一直在后台在运行
那我们可以通过那些 IO 口
或者通过我们的那个寄存器
可以直接获取到他的一些信息跟结果
那最后两个呢
就是要我们通过那个寄存器配置
去打开的 就是按需来去执行
那比如说那个上电自检
那我们可以在系统调试的时候
让那个发送器发一个已知序列
然后我们去判断有没有问题
或者说这个图案生成器
我们也是可以在系统调试的时候
如果出现了问题
我们可以通过这个图案生成器
去判断到底是哪一部分的
到底是哪一部分的
那个芯片出了问题
那下面我们再具体讲一讲
我们每一部分诊断的功能
那第一个锁定那刚刚前面也讲过了
因为我们解串器就收端
我需要从串行信号把时钟解出来
然后再去做一个数据的输出
那如果说我们的那个收端的锁定不住
那这个 lock 就会有问题
所以说我们一般碰到问题
我们先看 lock 引脚到底是高还是低
那如果说 lock 是低或者一直为低
如果 lock 一直为低
可能我们要看看是不是没有发信号过来
如果 lock 偶尔会变低会跳
那可能我们可以看到是不是由于
我们发送端的那个时钟抖动更大
或者说有什么干扰导致的
一般如果 lock 有问题的话
我们一般会检查硬件
看是不是硬件设计 这边的问题
或者说是检查我们前端处理器
或 sensor 的那个时钟的质量这个问题
这跟时钟相关
然后第二个就是说除了 lock 引脚以外
我们还可以通过其它引脚
去检测一个这种情况
那我们可以把某些 IO 口
或者说设置成一些中断的输出
那这中断输出
它可以实时反映说我的 sensor 的状况
反映出我的那个接收机的情况
反应是我们出错的情况
那我们可以借用这些中断
然后给到我们的处理器
让处理器它就回读我们的信息
这样来实现我们的一个
一个自动诊断的一个功能
那比如说我想实时检测
我这个传输的一个误码
那我可以把一个 IO 口设置成
我这个只要我一旦有误吗
我这 IO 口就会变低
那这样的话一旦这个我传输出现错误
那 IO 口一变低
那处理器就会直接能够得知这个中断
然后马上回过来去读取我们的那个寄存器
就可以得到我们具体的一个情况
那这个是我们用更多的 IO 口
去可以做一个监控的一个功能
然后这个是我们重复前面讲到了一些
我们测试的一些技巧
那第一个呢
我们可以用 lock 脚
去看看到底那个时钟稳不稳定能不能锁住
然后第二个的话 PASS 的话
是配合刚刚说那个上电自检用的
如果说我们的上电自检都没问题
那他 PASS 应该是一直为高
然后第三个是那个 CMLOUT
他就是说他可以把这个接收的一个信号
把那个回传的给去掉
然后再通过 EQ 以后
就他把那个串行的闭合眼睛
通过我们这个 EQ 整形以后再重新出来
那这里的话我们就可以用示波器看到
那我这个接收机
经过接收机整形以后
那这个眼图怎么样
那这个能不能够准确去判断
我们的这个时钟 跟那个零跟一的数据
我们可以在这里来去测量眼图
那往下一个是那个叫图案生成器
就我们每一颗 IC 内部
都有一个这样的图案生成器
那可以生成比如说那个彩条
或者说比如说呢固定颜色
这样一个屏幕的一个图案
这样的好处是我们可以
可以撇开我们那个输入源那个影响
然后直接看我们那个传输路径有没有问题
然后刚刚说那个彩条也好
还有那个固定的颜色也好
我们的分辨率 帧率等等都是可以调的
那我们可以通过寄存器这边去设置
那具体的设置
各位可以参看我们的规格书跟应用笔记
也可以用我们那个对应的一个LP软件
来进行一个配置
这可以很好去帮助我们的一个测试调试
然后再往下一个是那个上电自检
那这个用处就说我让那个发送器
去发一个双方都已知的序列给到接收
然后接收呢再通过一个比对
去看看我们这个传输有没有问题
那这个的话也可以帮助大家去判断
我们那个链路的一个可靠性
然后前面讲的都是我们
所有的 FPD-Link 都会有的
这样的一些性能
然后对于我们最新的
比如说我们 953 这个系列
那除了我们前面讲的一些诊断功能以外呢
它还会有一些额外的一些功能
那比如说他可以去监测我们 POC
就它供电电压 温度 那个链路情况
还有那个比特错误率等等
还有包括什么 CRC I2C 保护
那它能够实时的把这些信息
传到我们那个主机
然后让主机来做出这样一个判断
那它甚至还能告诉你
我这根同轴线在哪个位置有短路
哪个位置有开路
那这样的话我们就可以很好的去
当我们在维修或在那个调试的时候
那我们就会很好去
提高我们那个维修的效率
所以这个是关于我们的
一个时钟跟诊断功能的一个设置
然后往下呢是一个最后一个部分
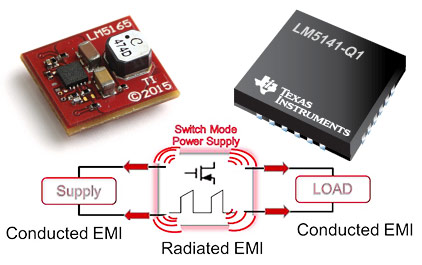
就关于我们 POC 的一个设计
那什么叫 POC 呢
其实就是那个叫线缆上的供电
这样一个称呼
就 Power Over Cable
那其实 POC 它并不是
它并不是一个新的概念
其实在我们其实大家可能都见过
我们以前会把那个什么天线放在屋顶
然后让这个可以更好去接收
这样一个电视的信号
其实就在那种场合
我们已经用了这种 POC 这种概念
那这个是一个原理框图
那这个呢是一个天线
那我们天线的信号会通过一个发送器
通过个电容要通过同轴
然后传到那个室内
然后通过接收器然后给到我们电视机
这样我们可以看到清晰的图像
但如果是一些有源天线的话
那天线本身也需要供电那怎么办呢
那我们可能会在这个室内呢会有一个电源
这个电源通过个大电感
把那个 DC 耦合上去
给到我们那个同轴电缆
然后到了另外一端呢
再把这个电源解出来
然后同时给我们发送器供电
那其实这样的话
对于这个系统
那我们就已经在这跟线缆上
实现了一个视频信号的传输
那同时呢也实现了一个
供电的一个反向传输
那这个呢就是一个典型的
就是一个典型的一个叫
线缆供电的一个例子
然后我们看下面看看
它是怎么工作的
那我们把上面的这个图来做一个等效
就分别看一个 AC 的
交流等效的一个图
跟一个直流等效的一个图
然后我们右边呢
分别画出这个电容跟电感的
一个阻抗跟那个增益
那这个黄色这个是电感的阻抗的值
然后这个紫色的是电容的阻抗值
那我们可以看到在 AC 高频的情况下
在高频的时候
我们的电容阻抗是非常小的
所以说高频信号是可以通过这个电容
来传到我们的接收端 不受影响
那同时由于在高频情况下
这个电感的阻抗就非常大
所以说这个高频信号
它就基本上就不会通过电感这么去流走
所以的话
这个是高频情况
那当然我们要保证这个电感
在这个高频情况下它的阻抗足够大
这样才能保证我们的通信不受影响
然后第二个呢是
我们的那个 DC 的那个等效电路
那在 DC 的时候
由于我们的直流的话
电容的那个阻抗非常高
所以在 DC 那个点的话
我们这个电容就等于断路就没有了
但是呢 DC 的电感的阻抗非常低
所以说我们电源相当于一个直流信号
就可以通过电感
然后通过这个线缆传到另外一端做个传输
那这样呢通过这个 L 跟 C 的配合
我们就可以实现
我们就可以实现这个高频信号
跟那个低频的电源两个互相传输
而不会有干扰
那我们怎么去选这个电感
那我们先看看电感的参数
那除了一个是电感的感量
第一个电感的感量 就多少毫亨微亨
然后第二个是说电感的饱和电流
那电感饱和电流就是说
我电感的感量下降到 30% 了以后
它那个电流值那我们一般选择
电感的工作电流
一般要远远小于电感饱和电流
来保证我们这个稳定性
还有一个电感的一个dc的阻抗
还有我们电感的一个
串联的一个谐振频率等等
还以及我们那个电感的工作范围
那这个很重要
电感工作频率范围在我们这里
我们因为电感它是一个这样的等效网络
其实它对于不同的频率
他呢感量是不一样的
那我们这里所说的
这个电感的那个工作频率范围呢
是指电感在那个阻抗最大的的时候
这样一个频率段
那这个频率范围
以及我们刚刚讲到的
这个电感的一个饱和的电流
那都会对我们后面的这个 POC 的设计
会有一个很大的一个影响
那这边我们就先讲解一下
我们大概的一个 POC 设计
那对于这个 AC 的通路
我们要保证这个电感的阻抗足够大
这样来保证我这个高频信号
不会因为这个电感
然后分流到地流走
那所以这样在这种 AC 的那个场合
我们就要保证这个电感呢
在高频下的那个高阻抗
并且的话它必须在
因为我们那个信号的速率可能会变化
可能是一个宽的频带
所以我们就要保证说
这个电感必须在一个宽的频带以内
保持一个很高的阻抗
这样才能够适应我们不同的
那个频段的一个变化
然后第三个呢就是说我们要保证这个
这个对于 DC 的情况我们要保证
这个因为电感要走我们的这个
直流的一个电源的一个电流
所以我们就要保证
在这个电源的电流最大的情况下
这个电感不能饱和
因为一饱和这电感就变成一根导线
我们整个系统就崩溃
所以说第三个就是
我们要保证我们这个
正常的极限工作电流
那必须小于我们电感的那个饱和电流
对这个是电感的要求
当然然后往后呢我们可能还会考虑说
我这个尽量把电感的阻抗这个变小
这样可以降低那个压降
也可以降低这个发热
然后这一边呢我们就举出一个例子
比如说我这个
总线供电是五伏电流 0.3A
那他可以供 1.5 W
如果说我的摄像头我的那个设备需要12瓦
那可能我就因为这个DC
那个同轴线缆上的那个阻抗有限
所以我们一般都会去限制流过电流
那如果说我这对于这个系统
那对于这根同轴线
跟对于这个电感
我们就限定我们最高只能到300毫安
那如果说我这个摄像头只需要 1.5 瓦
那这个时候
我就可以拿一个 5V 来做供电
这样的车是实现 1.5W
如果说我们的摄像头它功耗稍大 要三瓦
那可能我就需要把电压
提高到十伏来实现这个要求
如果说我这个是一个更大的系统
我需要那个 12 瓦
那这个时候呢
为了保证那个系统损耗足够小
我们就可能要进一步把电压提高
提到 40V 这样来去传输
这个就跟我们的那种高压输电有点类似
就为了保证电流足够小
我们就必须把电压来提高
然后往下呢是两个例子
对于这个 POC
但第一个是如果说我们系统
是使用那种屏蔽双绞线的话
那这个就比较简单
因为我们那种 HSD 那种线
它里面会有两对双绞
那我们可以用其中一对来传输这个数据
用另外一对来传电源
那他这个就比较简单
我就不需要加刚刚那一堆那个
LC 的一个网络的一个设备
这是第一种
但是我们绝大部分的场合
我们都会用那个同轴的那个电缆供电
那对这种情况
我们就需要加入刚刚说的那种LC的电路
那这个是没有 POC 的一个系统
从这边发这边收
我们要加入
我们加入这个 L 跟这个 C 的网络
让我们的信号跟我们的那个电源
能够并行不悖的在那个同一根线上传输
这个是我们的一个系统结构
那看完结构以后
那我们刚刚说电感
它需要一个很宽的频段下去
保持那个很高的一个阻抗
来保证我们的那个信号不会被衰减
那我们要在什么频段下保持高阻抗
我们可以看一下
那比如说我们用那个
913 跟 914 这两个搭配
那这两个芯片的话
我们的反向的通道的速率是 2.5M
然后我们的那个正向的
那个速率最高是 1.4G
那为了保证我这个链路
在从 2.5M 到 1.4G 这个频段内
我的传输的数据
都不会因为电感而被衰减
所以我们就必须要保证
在它的奈奎斯特的频率就 2.5÷2
1.4÷2
就从1.25兆到700兆这个范围以内
我的电感都是有一个很高的阻抗的
但是这个频率其实很宽
从1.25到700兆
我们可以回去看看这个电感
那一般一个电感
它只会在某个频点会阻抗很高
但是你一旦离一个频点越远
它阻抗越来越低
那刚刚我们说到
他要在那个两点几兆
这里到那个 700 多兆
那频率都很高
那这个时候这个单靠一个电感
我们就不能实现
所以对于这种情况呢
我们就会使用多个电感来串联
那我们这个举个例子
我们用个 100 10 1 0.24μ 做个串联
当我把这四个电感全串一起的时候
那我们就可以得到一个
在很宽的频率范围内
能够保持一个很高的阻抗的这样一个组合
对那这个就是这样的一个组合
所以这个就是我们那个
电感串联的一个考量
然后第二个呢
就是说我们的
一个电感的一个电流的一个考量
那比如说我这个电感
我的饱和电流是 500 毫安
那一般来说呢
我们极限就只会让它用到300毫安这个电流
那如果说我的系统需要
我的系统需要 1.5 瓦
那可能我就会用五伏供电
如果说我们的系统需要更高的电压
更高的功率比如说 九 瓦
那我可能就需要 30 伏这样一个供电
同时我们还要考虑
它这个电感的阻抗跟那个线的压降
来保证我们在收端能够有足够电压
来给到我们那个设备去供电
然后往下这个就是说
我们的那个供电的波动对他的影响
那这个是我们的一个场同步
经常就我们我们一般摄像头
它每一帧会有个消隐
然后在每一帧的时间内
它因为它每一帧呢它是要读取那个数据
所以在每一帧那个他那个采样的时间
它会有个比较高的电流
然后在消隐时间它会有个比较低的电流
那由于这种动态电流变化
就会导致我这个
这边的电压有 由于它有阻抗
它也会有这样一个动态电压变化
那这个动态电压变化呢
就可能会导致说我这个电压会有波动
从而导致会影响我的通讯的质量
那如果说我们这里是用 LDO 的话
那可能这个波动会比较大
因为 LDO 的输入跟输出是一样的电流
如果我们用用 DCDC 那相对会好一点点
那如何去减少这种
由于我们那个 sensor 的那个
每一帧的动态电流变化而导致的电压波动
那我们的一般的做法
一个最有效的做法
就是把这个供电电压提高
就把那个电流减小
那我们这做了个对比
这边我们去对比了四组
就四伏 四伏 六伏 十伏
这四种供电电压
然后这边我们去测量
到接收端的一个供电纹波
那当我供电电压
源端电压越高的时候
我的那个纹波就越小
所以通过这种方式我们就可以解决
可以去减轻甚至解决
由于 sensor 的动态电流变化
导致的一个问题
然后往下这个是 layout 的部分
那我们这有一个示例
那我们这个芯片出来
就近我们先放两个格子电容
然后呢再用50欧姆这个等效阻抗走线
然后我们要注意
这两根线的距离要大过三倍那个线宽
然后这边呢再通过
通过一个线到达我们那个插座这边
那同时我们的 POC 链路
就那个电感跟电容
通过在靠近这个插座这边
再接入到我们的这个同轴线上
然后至于另外一边呢那个负端
我们就跟他并行走
跟正端并行走
然后当这个负端
当正端的那个走线
到达同轴供电的那个接入点的时候
我们才把负端分开
然后拿一个电容接地
这个是我们一个
标准的一个 layout 的方式
那这个是对于我们那种贴片的
那个连接器的一个 layout 的方式
那如果说对应那个直插方式连接器的话
那我们是建议说
当我信号要到这点的时候
我们通过过孔打到底层
然后由底层再连到我们那个
直插方式那个插座上
那为什么这要打过孔
那是因为如果说我们不打过孔
因为你的那个连接器是直插的
如果我从顶层走 不打过孔
这么过去那这个直插的这个引脚
就会造成一个叫抽头
这会导致那个信号的反射
会影响我信号质量
那如果说我这里我先打过孔下来
然后从底层走
再通过这个引脚再上去
这样我这个抽头就变得很短
就基本上就不会说
影响到我们的这个信号的质量
那这个就是我们总的一个结构了
我们这个 POC 不会影响
可以实现那个信号
跟我们那个电源同时传输
不会有任何的问题
然后往下是我们几款
最新的一个产品的介绍
那刚刚这个是刚刚 953 954
我们前面也讲到
他可以通过那个主机端去发送时钟
在摄像头中就不需要那个晶振
可以实现同步时钟的模式
然后第二个是我们那个 954 呢
可以同时带两个摄像头
一个或两个
并且它输出可以
灵活配置一个两路 MIPI 输出
刚刚这个是 953 954 的
就我们可以通过那个同步方式
就不需要外部这个晶振
那最后是我们的 96x 这个系列
那可以他一个芯片
同时实现我们四个摄像头连接
然后转成那个两路或一路
MIPI 输出 灵活配置
然后的话有各种诊断的功能
OK 所以前面这节比较长
那这个我们就讲到了 FPD-Link
在我们的 ADAS 上的一些具体应用
以及我们的 FPD-Link 产品的一些
比较有特色的一些特点
给大家做一个详细的一个分享
然后往下呢我们会再讲一讲
我们针对 FPD-Link 的
产品的一些设计的
针对屏幕显示的 FPD-Link 产品
那我们刚刚是讲到了
这个摄像头连接的
那可能各位可能还会做一些
跟屏幕连接相关的一个产品
那我们这里就会有一些大概介绍
那我们有这个横轴是那个并行接口
我们有 RGB OLDI HDMI MIPI 等等
然后纵轴呢是那个分辨率
那我们从那个 XGA 到那个 2K 3K
都有对应产品
各位除了做摄像头以外
还会做那种屏幕连接的话
那我们就可以根据你的那个接口
跟你的那个分辨率去选择
那我们这里的话
我们所有的奇数的
我们奇数的那个型号都是发送器
然后我们偶数的都是那个接收器
那我们这里任意一颗奇数的产品
都可以跟这里
任意一颗偶数的产品做一个搭配
不会有任何的问题
这个就是我们的
那个屏幕端的一个配置
-
 未学习 汽车车身控制模块1
未学习 汽车车身控制模块1
-
 未学习 汽车车身控制模块2
未学习 汽车车身控制模块2
-
 未学习 汽车车身控制模块3
未学习 汽车车身控制模块3
-
 未学习 汽车车身控制模块4
未学习 汽车车身控制模块4
-
 未学习 电动汽车模拟引擎声音系统设计1
未学习 电动汽车模拟引擎声音系统设计1
-
 未学习 电动汽车模拟引擎声音系统设计2
未学习 电动汽车模拟引擎声音系统设计2
-
 未学习 电动汽车模拟引擎声音系统设计3
未学习 电动汽车模拟引擎声音系统设计3
-
 未学习 ADAS-车用全景解决方案 - TID3X -1
未学习 ADAS-车用全景解决方案 - TID3X -1
-
 未学习 ADAS-车用全景解决方案 - TID3X -2
未学习 ADAS-车用全景解决方案 - TID3X -2
-
 未学习 ADAS-车用全景解决方案 - TID3X -3
未学习 ADAS-车用全景解决方案 - TID3X -3
-
 未学习 ADAS-车用全景解决方案 - TID3X -4
未学习 ADAS-车用全景解决方案 - TID3X -4
-
 未学习 ADAS 主流系统架构介绍与设计挑战-1
未学习 ADAS 主流系统架构介绍与设计挑战-1
-
 未学习 ADAS 主流系统架构介绍与设计挑战-2
未学习 ADAS 主流系统架构介绍与设计挑战-2
-
 未学习 ADAS 主流系统架构介绍与设计挑战-3
未学习 ADAS 主流系统架构介绍与设计挑战-3
-
 未学习 ADAS 主流系统架构介绍与设计挑战-4
未学习 ADAS 主流系统架构介绍与设计挑战-4
-
 未学习 ADAS-车用全景解决方案 - TDA2E17
未学习 ADAS-车用全景解决方案 - TDA2E17
-
 未学习 车身照明系统设计
未学习 车身照明系统设计

















