
隔离式 DC/DC 转换器
最新课程
- 在机器人应用中利用毫米波技术
- 利用 TI 毫米波传感器的移动机器人应用
- 利用 TI 毫米波传感器的工业机器人应用
- CCS 和 C2000Ware 入门
- 介绍热门功率半导体
- 数字电源控制介绍
- Processor SDK
- 为您的设计找到合适的模拟电源控制器
- 高效 DCDC 转换器噪音和干扰抑制(上)
- 高效 DCDC 转换器噪音和干扰抑制(下)
热门课程
双向DC-DC 变换器拓扑的对比与设计(2) – 拓扑比较


大家好
我是德州仪器的系统工程师 David
今天非常高兴和大家继续分享
TI 双向 DC-DC 变换器拓扑的设计和对比
今天主要讲解
双向 DC-DC 变换器拓扑的选用
一种为四相交错固定频率的双向变换器
另一种为四相交错的零电压开关
临界模式的双向变换器
首先来对比这两种拓扑
最流行的拓扑为硬开关非隔离同步变换器
这种拓扑优点主要有以下三点
第一 控制简单
第二 通常采用固定频率控制
滤波器也设计相对容易
第三 采用 CCM 模式
有比较小的电感电流纹波
但是这种硬开关拓扑同样存在两个缺点
首先 是开关管工作在硬开关模式下
有较大的电压尖峰和较大的电压的上升率
第二 是有较高的共模噪音
这两个缺点给 layout 和 EMI 的设计
带来了很大的挑战
接下来继续看另外一个临界模式同步变换器
这种拓扑的优点是
开关管工作在软开关模式下
这样会带来效率的提高
由于开关管工作在软开关模式下
也会使得共模噪音大大的降低
但是这种拓扑同样存在以下三个主要的缺点
由于工作在临界模式下
同等的功率相对 CCM 模式
有较高的电感电流纹波
控制器需要通过电平的模式来实现
输入电压和负载变化时
工作在软开关模式下
由于频率不固定
给滤波器的设计也带来了挑战
ZVS 实现的控制会相对复杂
介绍完这两种拓扑的优点和缺点的对比
我们继续来看这两种拓扑的工作原理
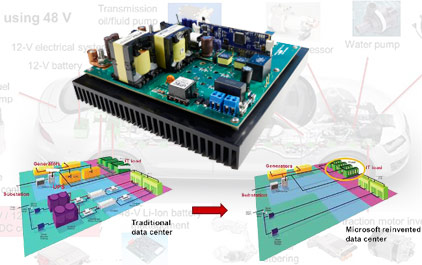
中间即为双向 DC-DC 变换器的功能框图
当能量从左边 48V 向右边 12V 充电时
变换器工作在 Buck 模式
反之工作在 Boost 模式
左边为硬开关双向 DC-DC 变换器
这里我们简单介绍下
Buck 和 Boost 的工作原理
首先来看 Buck 模式
当上管开通时电感电流线性上升
上管关断时下管的体二极管续流
当体二极管导通后然后再去开通下管
设定一定的死区时间
同样可以实现下管的零电压开通
在下管的开通期间
电感电流线性地下降
当下管关断时
电感的电流为正值
在下个周期上管要开通时
存在较大的开关损耗
接下来看 Boost 模式
当下管开通时
电感电流线性上升
当下管关断时上管的体二极管续流
当体二极管导通后然后再去开通上管
设定一定的死区时间
同样可以实现上管的零电压开通
当上管关断时电感的电流为正值
在下个周期下管要开通时
存在较大的开关损耗
总结起来 Buck 模式下
只有下关的开通
可以通过死区时间来实现 ZVS
下管的关断 上管的开通和关断
都有较大的损耗
介绍完硬开关的双向 DC-DC 变换器
再介绍软开关 DC-DC 变换器
首先来看 Buck 模式
当上管开通时电感电流线性上升
上管关断时 下管的体二极管续流
当体二极管开通后然后再去开通下管
可以实现下管的零电压开通
在下管的开通期间 电感电流线性的下降
当下管关断时电感的电流为负值
这个电感的负电流可以充电下管的结电容
当开关节点的电压和输入电压相等时
再去开通上管
实现了上管的零电压开通
接下来看 Boost 模式
当下管开通时 电感电流线性上升
当下管关断时 上管的体二极管续流
当体二极管导通后 然后再去开通上管
设定一定的死区时间
同样可以实现上管的零电压开通
当上管关断时 电感的电流为负值
这个电感的负电流
可以使下管的体二极管来续流
当体二极管导通后再去开通下管
可以实现下管的零电压开通
总结起来软开关模式下
只有上管和下管的开通
可以通过死区时间来实现 ZVS
但是上管和下管的关断仍然存在较大的损耗
谢谢大家
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(1) – 应用概览
未学习 双向DC-DC 变换器拓扑的对比与设计(1) – 应用概览
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(2) – 拓扑比较
未学习 双向DC-DC 变换器拓扑的对比与设计(2) – 拓扑比较
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(3) – UCD3138控制方案
未学习 双向DC-DC 变换器拓扑的对比与设计(3) – UCD3138控制方案
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(4) – 测试结果的比较
未学习 双向DC-DC 变换器拓扑的对比与设计(4) – 测试结果的比较
-
 未学习 双向DC-DC 变换器拓扑的对比与设计(5) – 性能及总结
未学习 双向DC-DC 变换器拓扑的对比与设计(5) – 性能及总结





