
高级驾驶辅助系统 (ADAS)
最新课程
- 解决汽车摄像头模块中的设计难题
- 利用智能传感激发创新
- 利用 TI 的逻辑封装创新节省电路板空间
- 比较三相工业系统的交流/直流电源转换拓扑
- 三相工业系统的交流/直流(AC-DC)电源转换拓扑
- TI 高压研讨会
- 从零开始学 PSpice® for TI 仿真工具 - 手把手操作实训课程
- 高压系统功能安全简介
- 揭秘高压应用安规中的电气间隙和爬电距离
- 管理微型逆变器中的电源转换挑战
热门课程
FMEA过程简介以及实现方法



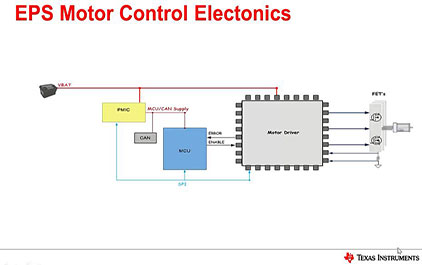
一个框图可以看到
那
电机驱动器相当于一个门驱动在这里
后面接比如三相无刷电机的话是
六个 MOS 管三对半桥
那前面这个是
MCU 控制器
然后它会这个电源端直接过到这边
给这个 PMIC 供电给 MCU 供电
当然这个电池端也直接给马达驱动供电
然后这个电机的马达驱动和 MCU 之间
或者 PMIC 之间它可以通过 SPI 进行一个通讯
那这个 MCU 的话我们其实可以推荐 TI
我们叫 Hercules 安全的这个 MCU
它可以做
这个芯片本身是个安全的 MCU
然后它用这个电机控制算法
来控制这个马达驱动器
PMIC 的话就是说我们有这个
TPS 多轨的这个电源功能
给这个 MCU 可以供电
多通道的一个电源
然后门驱动系列的话其实就是我们
DRV3000 系列的这个
安全的这个汽车的这个
无刷电机门驱动
它可以驱动四个或者六
六个这个
外置的 MOS 管等于是一个全桥或者是
三个半桥这个 门驱动
然后这个 DRV3000 的话
它也提供这种诊断和保护功能
是针对外面这个 MOS 管的一个诊断和保护功能
同时的话这个 DRV 产品
它可以提供整个系统
这个保护和诊断的一个特点
然后这个芯片本身内部也是带了这个电流
Sensing 就是采样电路的这个功能
那在这个系统里面有些可能哪些一些失效呢
那这里面分这个普通的危害和
可能这个机制 第一个的话就是这个
就转动的这个损失
就转动的这个损失
那转动损失的话可能的机制就是说
要不就是电机线圈短路了或者是
要不是短路要不是开路断开了
MOS 管被烧掉了或者也是被
断开了
那马达驱动这个芯片本身被烧坏了
MCU 失效
电源这个芯片失效
或者说
这里面芯片的一些不正确的一些配置
这里面是有一些可能性
那不期望的一些转动就说
没有意想到的一些转动的话
比如说这个 MCU
熔断了
坏了
那门驱动它的逻辑错位了错乱了
那可能是本来是这样转的突然到这里
经过它翻译以后驱动以后就变坏
那另外的话这里面
这里面 MOS 管阵列里面某个 MOS 管
或者一些 MOS 管被短路了
它也会造成一些意想不到的一些转动
还有一个的话就是说
错误的方向其实跟这个
不希望这个就是没有想到的
这个转动其实是一样的意思
驱动系统怎么样缓解这些失效
那实际上模型的话我们要先对一些对应的策略
那第一个的话就电机线圈的短路或开路的话
就监控这个 MOS 管的流过的电流
然后就关掉这个电源
如果 MOS 管本身的开路短路或损坏的话
我们也是监控这个 MOS 管流过的这个电流
或者说监控 Gate-Source 端的这个电流
如果有异常的话也会把这个
电源给关掉
那马达驱动本身那个损坏的话我们
DRV3000 的话它会检测自己内部的信号
执行一些内部的检测或保护
然后去阻止这个运行
MCU 这个失效的话
就是说在电机驱动芯片上面也会有看门狗
它可以给 MCU 或者是给 PMIC 去
监控
然后如果是这个看门狗失效的话它会去复位 MCU
PMIC 的话也是一样就是说这个看门狗去
复位这个 MCU 如果说这个电源掉下来的话
那不正确这个芯片配置的话
它也会通过这个 Checksum 的这个检查
MCU Brownout 的话刚才也讲过
那电机驱动逻辑的一个混乱
或者不对的话就说去监控电机
门驱动这个逻辑这个电压
是欠压还是过压的
然后自我检测这个门驱动的一个
做一些保护
那同样这个安全目标的话
就是不同的这个一些手段
那电机驱动系统的话它其实是
需要的话就是保护这个电机本身
保护这个 MOS 驱动
监控这个
电池端的电压、内部的一些失效
或者是监控系统 MCU 的失效
然后监控这个 PMIC 电源芯片的一个失效
或者是软件和一些配置
那下面的话其实有两种
一个的话就是我们叫做分布式这个
安全构架 另外一个的话是集成式的
那分布式的话比如说这种 PMIC 监控
可能是摆在外面直接对 PMIC 监控
这个是分布式的 那如果集成在我们这个
电机驱动芯片里面那这个是集成的
那 MOS 管这个保护可能是在这个
那 MOS 管这个保护可能是在这个
电机驱动芯片里面 电池的监控是在这里面
安全通信
也是在这个
看门狗的话
那如果是这种集成式的话
也是放在这个电机驱动芯片里面
那如果是分布式的话是摆在外面
然后一些诊断
保护功能也是摆在这个电机驱动芯片里面
还有一些这个
一些
外置的一些运放 一些模拟器件
也是摆在这个电机驱动芯片里面
不管是集成式还是分布式的话
它都能够取得任何这个 ASIL 这个安全等级
那作为一个比较的话
左边是这个分布式这个安全构架
右边是这种集成式的话
它们有哪样的一些优缺点呢
分布式的话通常来说会更便宜一些
但是它增加了这个
系统中的冗余放在这个外面
然后也简单的去直接
采购或者是比较灵活
它也能够可以比如说继续沿用
你以前旧的这些 MCU 或者软件
那不利的地方就是说它增加了
这个系统的复杂程度
然后那个成本的这个
元器件的个数会更多一些
然后就说你开发周期会更长一些
对这种集成这个安全构架来说的好处就是说
对潜在的话会降低这个系统这个复杂程度
进一步降低这个元器件的个数
把这个做的更小然后开发时间会很快
它的缺点的话就是说这个冗余度不是很够
因为很多东西都摆在这个单个芯片上面去
然后它对可能对以前的一些
旧的 MCU 或者软件的话不一定能兼容
然后对一些特别
有些特别的或者定制一些
一些方案的事情的话不是特别好用
所以不管是分布设计我们有不同的料号
分布式的话我们是 DRV3245-Q1
那集成式的话是我们 DRV3201-Q1
或者 DRV3205-Q1,这些都是车规的
-
 未学习 汽车功能安全简介以及功能安全应用示例
未学习 汽车功能安全简介以及功能安全应用示例
-
 未学习 FMEA过程简介以及实现方法
未学习 FMEA过程简介以及实现方法
-
 未学习 实现认证并开始你的功能安全开发
未学习 实现认证并开始你的功能安全开发



