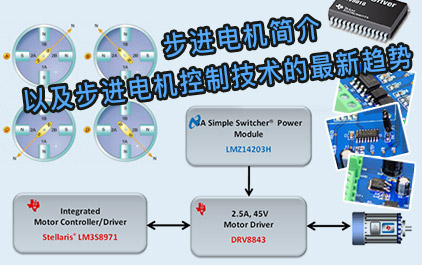
步进电机简介
Loading the player...
将在30s后自动为您播放下一课程
介绍一下这个步进电机简介这一块 嗯这个培训的话分两部分 第一部分的话主要介绍步进电机本身 那另外一部分的话就是步进电机的电控啊 主要就是说步进电机的电流的一个调整功能 这一页的话是步进电机的一个应用 步进电机是一个简单的开环的 一个位置和速度的一个控制 那基于这个控制的话 我们可以想得到啊一些比较经典的一些应用 比如说监控里面的这个摄像头啊 ATM 机 那冰箱里面的一些风门的一些控制 摇头的那个这个灯的一个控制 那打印机 3D 打印机里面会有非常多的步进电机 而还包括这个流量控制 或者阀门控制里面的电机,它也是步进电机 另外的话就是这个工业里面的一些应用 比如说这个纺织机械的一些产品 那这个的话就是说步进电机 它的一个结构可以看到 OK 右上角,那步进电机的话分两部分 中间这个的话是这个转子 外面这个线圈的话是这个定子 OK 那它的转子上面可以看到它开的这个齿槽 OK 它可以通过改变这个 定子线圈里面的这个电流的方向啊 产生这种磁场或者合成磁场 然后在驱动这个转子的这个磁铁旋转 OK 那步进电机的话它有一些优缺点 它的优点的话就说非常啊成熟 或者说价格非常低廉的一个 开环的速度和位置的一个控制 然后也非常容易去实现它的控制 算法比较简单 电机本身也是很可靠,OK 寿命也很长 然后它的这个扭矩也挺大 包括一些比较优秀的一些保持力矩等等 它的缺点的话就是说步进电机的话 其实从微观来看的话,走一步停一步 所以它会有一些噪音的问题,震动的问题 那另外的话就是步进电机 它是动态响应度会差一些 所以它的一些速度上的话可能转的效果不好 另外一个的话就是说这个大电感 或者说频繁的这种换相的话 它会限制步进电机这个转速 OK 步进电机的话 它的扭矩的纹波的话,它也会比较大一些 OK 然后步进电机的效率的话那肯定是低的 OK 这一页的话是这个步进电机全步的一个啊 一个运行的一个示意图 OK 可以看到,一般步进电机的话 主要现在目前是经典的话就是两相步进 OK 两相步进电机,A 相和 B 相 那给 A 相和 B 相 分别通不同方向的电的话 它其实会形成一个合成磁场 那从上面这个来看的话 它可以总共有四个方向的合成磁场 一个是右上那这个是右下,左下左上 那这是四个周期的话,刚好就是360度 就每一个的话是90度,那刚好走完这四步 那这里的每一步的话,我们叫一个大步 那一个周期的话就是四个大步 OK 这一页的话是一个半步的一个运行示意图 OK 半步的话其实分两种 那你可以看先看左边这个的话 就是2-1-2这种 那这个的话是在前面,看它全步的基础上 它又加了一个就是说只通 A 相,B 相不通电 它只有一个方向,这是一个磁场方向 那另外一个的话 接下来就是 AB 相合成磁场上 再接下来只有 B 相通电 然后再下面的话就 AB 相合成,然后再循环 所以它这样子的话是在这四个基础上 又加了四个的 AB 和 A反 和 B反 OK ,那同时可以看到啊 因为这里面每个电流它是百分之百输出的话 那这个 AB 合成的话 其实是B的大概根号二倍,1.4倍啊 所以你看到它每一步的话 其实每隔一步的话 它这个电流是不均匀的啊 就是一步小一步大,一步小一步大 OK 那右边这种这像右下图这个示意图的话 其实是一种更为常见的 就是说我们人为地去控制这个电流的比例 那它目的是什么呢,比如说 A 到 AB AB 合成的话,它的磁场啊 它这个扭矩的大小跟这个 A 是一样大 那就是说分别取 A 和 B 的根号1/2倍 大概就0.7多一些的这个电流 那合成 AB 的话就是跟 A 是一样的 那下面 A反 和 B反,AB反 和 AB反 都是一样 那这样的话就是说它可以这个半步的话 都是在一个同心的一个圆里面 它的半径都是一样的,它的扭矩是恒定的 那这样的话电机,步进电机转的话就会更加平稳 OK 声音的话也会更小一些 那在这个半步基础上的话 我们如果要做更多的细分的话啊 这里有个示意图,就是说举个例子 以八分之一细分来话 那我们只截取这个一个圆形的 这个四分就是一个大步90度 那在一个大步90度里面的话 它分成了八个小步,就是从 step1 到 step8 你可以看到 123452678 等等 那每一步的话 它刚才说的我们要保持着恒定的扭矩的话 那每一步的 A 相和 B 相的 合成的电流的话都是一样大的 那这个时候你就需要对 A 相的电流 B 相电流进行这样的一个分档 OK 那我们这样保证它们俩啊 不管是在哪一步的合成电流都是一样大的 OK 所以这里面的话 其实我们就做了一个这样的分档 OK 那如果把整个 A 相和 B 相电流波形 完整的拿出来看的话 可以看到 OK 那这里是 A 相这里是 B 相 它们相位的话差 90 度 那在每 1/4 啊,每90度的话,这是一个全步 那这里面全步里面的台阶数量 就是它的细分数量 OK 所以你可以看到步进,细分数越高的话 其实这个台阶的话其实是慢慢上涨 它的响应度是会慢一些的 那全步的话是会快一些,但全步带来问题 你可以看到啊 它的这个震荡会比较大一些 这里举个例子的话是以 DRV8818 来为例啊 8818 的话是最多是支持 1/8 细分的 一个步进电机驱动器 OK 它本身可以配成八分之一细分 或者说 1/4、半步,或者全步 那不同的这个细分数的话 这个是它这个电流波形的一个示意图 你可以看一下,那这个是全步 那半步的话,你可以看到 在这个 90 度周期里面就两个台阶一样 1/4 的话在这里就是 1234,那 1/8 的话 这个12345678 总共有八个步 所以说细分数越多的话 你可以看到它这个电机的这个每一步的话 它就是越接近于正弦波 OK 整个波形的话,就相对来说运行的更平稳 这一页的话是步进电机细分的一个总结 那左边的话是全步,右边的是这个半步 全步里面的话,其实这边的话是单相 单相的话现在其实用的很少 所以我们现在经常看的话都是两相的步进电机 那它那个优缺点就是说 优点就是说比较其实全步的话扭矩是最大 如果是 AB 相合成百分之百最大输出 如果你不去进行它的分档或者限流 OK 那控制非常简单,只有四个方向啊 它带来的缺点就是说 它会有很大的步与步切换的这个噪音 OK 然后这个震动也会比较大一些 半步的话,前面那一页也提到有两种 一个是2-1-2这种 它是非圆周形的扭矩不一样大的 OK 那这个当然它相对于全步来说 这些优点也是有的,就是说它因为它细分 步的精度会更高一些,会较少的一些震荡啊 然后运行得更平稳,控制计时也挺简单 唯一的一个缺点的话 就是说它这个扭矩的这个是不均匀的 这一步短一步长 OK 所以基于这个情况的话 我们就做了这个恒定转矩啊 这是一个圆周性的这样一个一个细分 那它的其它的好处的话 就在这个基础上又增加了 它的好处的话,其实跟那个一样 那唯一带来的话就是说 因为如果你细分数越多的话 因为它是要合成一样的这个电流大小 所以说它在比如说在零度或者在90度的话 那其中一项电流是非常小的 那这个时候的话就需要一个很小的 或者说很精确控制的一个电流 那下面这个的话是步进电机的一个总结 那不管是从全步、半步、1/4 到最高 到更高 250 的或更高,这个细分数的话 就是越高那你这个运行理论上的话 就转动会越平稳,会越安静一些 然后因为你的步数越高 那你每一个大步除以这个细分数 就是你每一个细分数的度数当然就会越小 所以它的精度会越高 OK 那另外一个的话 就是它这个噪音水平的话也会得到改善 OK 当然细分数越高的话 它就需要比较复杂或者是 高阶的一些电流的控制功能 那这里面可能就需要比特数比较高的 这些 AD,DAC 啊等等 OK 那我们从这个页开始来讲一下 这个电流调整功能 那这个的话可以看到啊 就是说这是一个电流 那电流的话,其实一个线圈的话 它其实分两部分 那这个是它的正常的工作或者充电的一个方式 那这个的话是放电啊 我们在 Decay 续流模式 再驱动再放电,再驱动再放电 OK ,那这里面有个 IFS 的话 就等于说我们这个限流值 那这个限流值的话是有个公式来计算 就是参考电压除以这个内部有个小运放 内部增益 Av ,再乘以这个外部的采样电阻 OK 那你这个当你这个采样电阻的 这个参考电压设定以后 这个 IFS 就是设定了 那当你这个线圈比,不管是 A 相和 B 相 当你工作的时候 对这个线圈进行电流方向的这个控制 当你下一个关掉 off 的时候 当到了这个电流的时候你就把它关掉 那这个时候就续流啊 因为这个线圈它也是一种电感啊 不会电流不会突变的来进行续流 当你下次再打开,当它掉下来之后 下次在一个 PWM 周期再打开的时候 它又上去,那又碰到这个 IFS 又下来 所以它就不断地打开关掉,打开关掉 OK OK 那这个电流的这个,这个调整功能 前面讲的那个细分 那这个细分的话就是 每 90 度里面的这个台阶的数量 那这个台阶是怎么做出来的话 其实就刚才用了我们这个电流调整功能 那这里面有多少个台阶 其实就取决于,你可以看下面这个图 OK 参考电压除于增益,和乘以这个采样电阻 那采样电阻增益都是固定的 那这个参考电压外面的话你给定一个值的话 那只能通过一个 DAC 来产生这样不同位 经过不同位数的 DAC 产生这样的台阶 OK 那这个台阶的数量其实就是 DAC 的这个位数 举个例子的话,如果 DAC 是三个比特的话 那刚好就是2的3次方,八个台阶 它就是八分之一细分 OK 如果是八比特的话 那就是二的八次方,256 个台阶 OK 所以它是通过 不管是内部还是外部的这个 DAC 然后提供这样的分档的这个参考电压 然后对这个电流进行分档 那这个步进电机的话 就是按照这个分档来进行
介绍一下这个步进电机简介这一块 嗯这个培训的话分两部分 第一部分的话主要介绍步进电机本身 那另外一部分的话就是步进电机的电控啊 主要就是说步进电机的电流的一个调整功能 这一页的话是步进电机的一个应用 步进电机是一个简单的开环的 一个位置和速度的一个控制 那基于这个控制的话 我们可以想得到啊一些比较经典的一些应用 比如说监控里面的这个摄像头啊 ATM 机 那冰箱里面的一些风门的一些控制 摇头的那个这个灯的一个控制 那打印机 3D 打印机里面会有非常多的步进电机 而还包括这个流量控制 或者阀门控制里面的电机,它也是步进电机 另外的话就是这个工业里面的一些应用 比如说这个纺织机械的一些产品 那这个的话就是说步进电机 它的一个结构可以看到 OK 右上角,那步进电机的话分两部分 中间这个的话是这个转子 外面这个线圈的话是这个定子 OK 那它的转子上面可以看到它开的这个齿槽 OK 它可以通过改变这个 定子线圈里面的这个电流的方向啊 产生这种磁场或者合成磁场 然后在驱动这个转子的这个磁铁旋转 OK 那步进电机的话它有一些优缺点 它的优点的话就说非常啊成熟 或者说价格非常低廉的一个 开环的速度和位置的一个控制 然后也非常容易去实现它的控制 算法比较简单 电机本身也是很可靠,OK 寿命也很长 然后它的这个扭矩也挺大 包括一些比较优秀的一些保持力矩等等 它的缺点的话就是说步进电机的话 其实从微观来看的话,走一步停一步 所以它会有一些噪音的问题,震动的问题 那另外的话就是步进电机 它是动态响应度会差一些 所以它的一些速度上的话可能转的效果不好 另外一个的话就是说这个大电感 或者说频繁的这种换相的话 它会限制步进电机这个转速 OK 步进电机的话 它的扭矩的纹波的话,它也会比较大一些 OK 然后步进电机的效率的话那肯定是低的 OK 这一页的话是这个步进电机全步的一个啊 一个运行的一个示意图 OK 可以看到,一般步进电机的话 主要现在目前是经典的话就是两相步进 OK 两相步进电机,A 相和 B 相 那给 A 相和 B 相 分别通不同方向的电的话 它其实会形成一个合成磁场 那从上面这个来看的话 它可以总共有四个方向的合成磁场 一个是右上那这个是右下,左下左上 那这是四个周期的话,刚好就是360度 就每一个的话是90度,那刚好走完这四步 那这里的每一步的话,我们叫一个大步 那一个周期的话就是四个大步 OK 这一页的话是一个半步的一个运行示意图 OK 半步的话其实分两种 那你可以看先看左边这个的话 就是2-1-2这种 那这个的话是在前面,看它全步的基础上 它又加了一个就是说只通 A 相,B 相不通电 它只有一个方向,这是一个磁场方向 那另外一个的话 接下来就是 AB 相合成磁场上 再接下来只有 B 相通电 然后再下面的话就 AB 相合成,然后再循环 所以它这样子的话是在这四个基础上 又加了四个的 AB 和 A反 和 B反 OK ,那同时可以看到啊 因为这里面每个电流它是百分之百输出的话 那这个 AB 合成的话 其实是B的大概根号二倍,1.4倍啊 所以你看到它每一步的话 其实每隔一步的话 它这个电流是不均匀的啊 就是一步小一步大,一步小一步大 OK 那右边这种这像右下图这个示意图的话 其实是一种更为常见的 就是说我们人为地去控制这个电流的比例 那它目的是什么呢,比如说 A 到 AB AB 合成的话,它的磁场啊 它这个扭矩的大小跟这个 A 是一样大 那就是说分别取 A 和 B 的根号1/2倍 大概就0.7多一些的这个电流 那合成 AB 的话就是跟 A 是一样的 那下面 A反 和 B反,AB反 和 AB反 都是一样 那这样的话就是说它可以这个半步的话 都是在一个同心的一个圆里面 它的半径都是一样的,它的扭矩是恒定的 那这样的话电机,步进电机转的话就会更加平稳 OK 声音的话也会更小一些 那在这个半步基础上的话 我们如果要做更多的细分的话啊 这里有个示意图,就是说举个例子 以八分之一细分来话 那我们只截取这个一个圆形的 这个四分就是一个大步90度 那在一个大步90度里面的话 它分成了八个小步,就是从 step1 到 step8 你可以看到 123452678 等等 那每一步的话 它刚才说的我们要保持着恒定的扭矩的话 那每一步的 A 相和 B 相的 合成的电流的话都是一样大的 那这个时候你就需要对 A 相的电流 B 相电流进行这样的一个分档 OK 那我们这样保证它们俩啊 不管是在哪一步的合成电流都是一样大的 OK 所以这里面的话 其实我们就做了一个这样的分档 OK 那如果把整个 A 相和 B 相电流波形 完整的拿出来看的话 可以看到 OK 那这里是 A 相这里是 B 相 它们相位的话差 90 度 那在每 1/4 啊,每90度的话,这是一个全步 那这里面全步里面的台阶数量 就是它的细分数量 OK 所以你可以看到步进,细分数越高的话 其实这个台阶的话其实是慢慢上涨 它的响应度是会慢一些的 那全步的话是会快一些,但全步带来问题 你可以看到啊 它的这个震荡会比较大一些 这里举个例子的话是以 DRV8818 来为例啊 8818 的话是最多是支持 1/8 细分的 一个步进电机驱动器 OK 它本身可以配成八分之一细分 或者说 1/4、半步,或者全步 那不同的这个细分数的话 这个是它这个电流波形的一个示意图 你可以看一下,那这个是全步 那半步的话,你可以看到 在这个 90 度周期里面就两个台阶一样 1/4 的话在这里就是 1234,那 1/8 的话 这个12345678 总共有八个步 所以说细分数越多的话 你可以看到它这个电机的这个每一步的话 它就是越接近于正弦波 OK 整个波形的话,就相对来说运行的更平稳 这一页的话是步进电机细分的一个总结 那左边的话是全步,右边的是这个半步 全步里面的话,其实这边的话是单相 单相的话现在其实用的很少 所以我们现在经常看的话都是两相的步进电机 那它那个优缺点就是说 优点就是说比较其实全步的话扭矩是最大 如果是 AB 相合成百分之百最大输出 如果你不去进行它的分档或者限流 OK 那控制非常简单,只有四个方向啊 它带来的缺点就是说 它会有很大的步与步切换的这个噪音 OK 然后这个震动也会比较大一些 半步的话,前面那一页也提到有两种 一个是2-1-2这种 它是非圆周形的扭矩不一样大的 OK 那这个当然它相对于全步来说 这些优点也是有的,就是说它因为它细分 步的精度会更高一些,会较少的一些震荡啊 然后运行得更平稳,控制计时也挺简单 唯一的一个缺点的话 就是说它这个扭矩的这个是不均匀的 这一步短一步长 OK 所以基于这个情况的话 我们就做了这个恒定转矩啊 这是一个圆周性的这样一个一个细分 那它的其它的好处的话 就在这个基础上又增加了 它的好处的话,其实跟那个一样 那唯一带来的话就是说 因为如果你细分数越多的话 因为它是要合成一样的这个电流大小 所以说它在比如说在零度或者在90度的话 那其中一项电流是非常小的 那这个时候的话就需要一个很小的 或者说很精确控制的一个电流 那下面这个的话是步进电机的一个总结 那不管是从全步、半步、1/4 到最高 到更高 250 的或更高,这个细分数的话 就是越高那你这个运行理论上的话 就转动会越平稳,会越安静一些 然后因为你的步数越高 那你每一个大步除以这个细分数 就是你每一个细分数的度数当然就会越小 所以它的精度会越高 OK 那另外一个的话 就是它这个噪音水平的话也会得到改善 OK 当然细分数越高的话 它就需要比较复杂或者是 高阶的一些电流的控制功能 那这里面可能就需要比特数比较高的 这些 AD,DAC 啊等等 OK 那我们从这个页开始来讲一下 这个电流调整功能 那这个的话可以看到啊 就是说这是一个电流 那电流的话,其实一个线圈的话 它其实分两部分 那这个是它的正常的工作或者充电的一个方式 那这个的话是放电啊 我们在 Decay 续流模式 再驱动再放电,再驱动再放电 OK ,那这里面有个 IFS 的话 就等于说我们这个限流值 那这个限流值的话是有个公式来计算 就是参考电压除以这个内部有个小运放 内部增益 Av ,再乘以这个外部的采样电阻 OK 那你这个当你这个采样电阻的 这个参考电压设定以后 这个 IFS 就是设定了 那当你这个线圈比,不管是 A 相和 B 相 当你工作的时候 对这个线圈进行电流方向的这个控制 当你下一个关掉 off 的时候 当到了这个电流的时候你就把它关掉 那这个时候就续流啊 因为这个线圈它也是一种电感啊 不会电流不会突变的来进行续流 当你下次再打开,当它掉下来之后 下次在一个 PWM 周期再打开的时候 它又上去,那又碰到这个 IFS 又下来 所以它就不断地打开关掉,打开关掉 OK OK 那这个电流的这个,这个调整功能 前面讲的那个细分 那这个细分的话就是 每 90 度里面的这个台阶的数量 那这个台阶是怎么做出来的话 其实就刚才用了我们这个电流调整功能 那这里面有多少个台阶 其实就取决于,你可以看下面这个图 OK 参考电压除于增益,和乘以这个采样电阻 那采样电阻增益都是固定的 那这个参考电压外面的话你给定一个值的话 那只能通过一个 DAC 来产生这样不同位 经过不同位数的 DAC 产生这样的台阶 OK 那这个台阶的数量其实就是 DAC 的这个位数 举个例子的话,如果 DAC 是三个比特的话 那刚好就是2的3次方,八个台阶 它就是八分之一细分 OK 如果是八比特的话 那就是二的八次方,256 个台阶 OK 所以它是通过 不管是内部还是外部的这个 DAC 然后提供这样的分档的这个参考电压 然后对这个电流进行分档 那这个步进电机的话 就是按照这个分档来进行
介绍一下这个步进电机简介这一块
嗯这个培训的话分两部分
第一部分的话主要介绍步进电机本身
那另外一部分的话就是步进电机的电控啊
主要就是说步进电机的电流的一个调整功能
这一页的话是步进电机的一个应用
步进电机是一个简单的开环的
一个位置和速度的一个控制
那基于这个控制的话
我们可以想得到啊一些比较经典的一些应用
比如说监控里面的这个摄像头啊 ATM 机
那冰箱里面的一些风门的一些控制
摇头的那个这个灯的一个控制
那打印机 3D 打印机里面会有非常多的步进电机
而还包括这个流量控制
或者阀门控制里面的电机,它也是步进电机
另外的话就是这个工业里面的一些应用
比如说这个纺织机械的一些产品
那这个的话就是说步进电机
它的一个结构可以看到
OK 右上角,那步进电机的话分两部分
中间这个的话是这个转子
外面这个线圈的话是这个定子
OK 那它的转子上面可以看到它开的这个齿槽
OK 它可以通过改变这个
定子线圈里面的这个电流的方向啊
产生这种磁场或者合成磁场
然后在驱动这个转子的这个磁铁旋转
OK 那步进电机的话它有一些优缺点
它的优点的话就说非常啊成熟
或者说价格非常低廉的一个
开环的速度和位置的一个控制
然后也非常容易去实现它的控制
算法比较简单
电机本身也是很可靠,OK 寿命也很长
然后它的这个扭矩也挺大
包括一些比较优秀的一些保持力矩等等
它的缺点的话就是说步进电机的话
其实从微观来看的话,走一步停一步
所以它会有一些噪音的问题,震动的问题
那另外的话就是步进电机
它是动态响应度会差一些
所以它的一些速度上的话可能转的效果不好
另外一个的话就是说这个大电感
或者说频繁的这种换相的话
它会限制步进电机这个转速
OK 步进电机的话
它的扭矩的纹波的话,它也会比较大一些
OK 然后步进电机的效率的话那肯定是低的
OK 这一页的话是这个步进电机全步的一个啊
一个运行的一个示意图
OK 可以看到,一般步进电机的话
主要现在目前是经典的话就是两相步进
OK 两相步进电机,A 相和 B 相
那给 A 相和 B 相
分别通不同方向的电的话
它其实会形成一个合成磁场
那从上面这个来看的话
它可以总共有四个方向的合成磁场
一个是右上那这个是右下,左下左上
那这是四个周期的话,刚好就是360度
就每一个的话是90度,那刚好走完这四步
那这里的每一步的话,我们叫一个大步
那一个周期的话就是四个大步
OK 这一页的话是一个半步的一个运行示意图
OK 半步的话其实分两种
那你可以看先看左边这个的话
就是2-1-2这种
那这个的话是在前面,看它全步的基础上
它又加了一个就是说只通 A 相,B 相不通电
它只有一个方向,这是一个磁场方向
那另外一个的话
接下来就是 AB 相合成磁场上
再接下来只有 B 相通电
然后再下面的话就 AB 相合成,然后再循环
所以它这样子的话是在这四个基础上
又加了四个的 AB 和 A反 和 B反
OK ,那同时可以看到啊
因为这里面每个电流它是百分之百输出的话
那这个 AB 合成的话
其实是B的大概根号二倍,1.4倍啊
所以你看到它每一步的话
其实每隔一步的话
它这个电流是不均匀的啊
就是一步小一步大,一步小一步大
OK 那右边这种这像右下图这个示意图的话
其实是一种更为常见的
就是说我们人为地去控制这个电流的比例
那它目的是什么呢,比如说 A 到 AB
AB 合成的话,它的磁场啊
它这个扭矩的大小跟这个 A 是一样大
那就是说分别取 A 和 B 的根号1/2倍
大概就0.7多一些的这个电流
那合成 AB 的话就是跟 A 是一样的
那下面 A反 和 B反,AB反 和 AB反 都是一样
那这样的话就是说它可以这个半步的话
都是在一个同心的一个圆里面
它的半径都是一样的,它的扭矩是恒定的
那这样的话电机,步进电机转的话就会更加平稳
OK 声音的话也会更小一些
那在这个半步基础上的话
我们如果要做更多的细分的话啊
这里有个示意图,就是说举个例子
以八分之一细分来话
那我们只截取这个一个圆形的
这个四分就是一个大步90度
那在一个大步90度里面的话
它分成了八个小步,就是从 step1 到 step8
你可以看到 123452678 等等
那每一步的话
它刚才说的我们要保持着恒定的扭矩的话
那每一步的 A 相和 B 相的
合成的电流的话都是一样大的
那这个时候你就需要对 A 相的电流
B 相电流进行这样的一个分档
OK 那我们这样保证它们俩啊
不管是在哪一步的合成电流都是一样大的
OK 所以这里面的话
其实我们就做了一个这样的分档
OK 那如果把整个 A 相和 B 相电流波形
完整的拿出来看的话
可以看到 OK 那这里是 A 相这里是 B 相
它们相位的话差 90 度
那在每 1/4 啊,每90度的话,这是一个全步
那这里面全步里面的台阶数量
就是它的细分数量
OK 所以你可以看到步进,细分数越高的话
其实这个台阶的话其实是慢慢上涨
它的响应度是会慢一些的
那全步的话是会快一些,但全步带来问题
你可以看到啊
它的这个震荡会比较大一些
这里举个例子的话是以 DRV8818 来为例啊
8818 的话是最多是支持 1/8 细分的
一个步进电机驱动器
OK 它本身可以配成八分之一细分
或者说 1/4、半步,或者全步
那不同的这个细分数的话
这个是它这个电流波形的一个示意图
你可以看一下,那这个是全步
那半步的话,你可以看到
在这个 90 度周期里面就两个台阶一样
1/4 的话在这里就是 1234,那 1/8 的话
这个12345678 总共有八个步
所以说细分数越多的话
你可以看到它这个电机的这个每一步的话
它就是越接近于正弦波
OK 整个波形的话,就相对来说运行的更平稳
这一页的话是步进电机细分的一个总结
那左边的话是全步,右边的是这个半步
全步里面的话,其实这边的话是单相
单相的话现在其实用的很少
所以我们现在经常看的话都是两相的步进电机
那它那个优缺点就是说
优点就是说比较其实全步的话扭矩是最大
如果是 AB 相合成百分之百最大输出
如果你不去进行它的分档或者限流
OK 那控制非常简单,只有四个方向啊
它带来的缺点就是说
它会有很大的步与步切换的这个噪音
OK 然后这个震动也会比较大一些
半步的话,前面那一页也提到有两种
一个是2-1-2这种
它是非圆周形的扭矩不一样大的
OK 那这个当然它相对于全步来说
这些优点也是有的,就是说它因为它细分
步的精度会更高一些,会较少的一些震荡啊
然后运行得更平稳,控制计时也挺简单
唯一的一个缺点的话
就是说它这个扭矩的这个是不均匀的
这一步短一步长
OK 所以基于这个情况的话
我们就做了这个恒定转矩啊
这是一个圆周性的这样一个一个细分
那它的其它的好处的话
就在这个基础上又增加了
它的好处的话,其实跟那个一样
那唯一带来的话就是说
因为如果你细分数越多的话
因为它是要合成一样的这个电流大小
所以说它在比如说在零度或者在90度的话
那其中一项电流是非常小的
那这个时候的话就需要一个很小的
或者说很精确控制的一个电流
那下面这个的话是步进电机的一个总结
那不管是从全步、半步、1/4 到最高
到更高 250 的或更高,这个细分数的话
就是越高那你这个运行理论上的话
就转动会越平稳,会越安静一些
然后因为你的步数越高
那你每一个大步除以这个细分数
就是你每一个细分数的度数当然就会越小
所以它的精度会越高
OK 那另外一个的话
就是它这个噪音水平的话也会得到改善
OK 当然细分数越高的话
它就需要比较复杂或者是
高阶的一些电流的控制功能
那这里面可能就需要比特数比较高的
这些 AD,DAC 啊等等
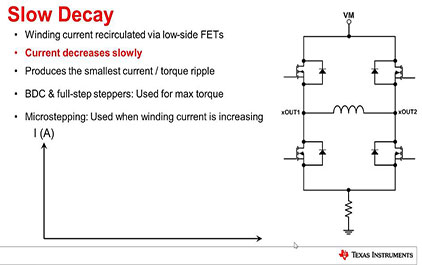
OK 那我们从这个页开始来讲一下
这个电流调整功能
那这个的话可以看到啊
就是说这是一个电流
那电流的话,其实一个线圈的话
它其实分两部分
那这个是它的正常的工作或者充电的一个方式
那这个的话是放电啊
我们在 Decay 续流模式
再驱动再放电,再驱动再放电
OK ,那这里面有个 IFS 的话
就等于说我们这个限流值
那这个限流值的话是有个公式来计算
就是参考电压除以这个内部有个小运放
内部增益 Av ,再乘以这个外部的采样电阻
OK 那你这个当你这个采样电阻的
这个参考电压设定以后
这个 IFS 就是设定了
那当你这个线圈比,不管是 A 相和 B 相
当你工作的时候
对这个线圈进行电流方向的这个控制
当你下一个关掉 off 的时候
当到了这个电流的时候你就把它关掉
那这个时候就续流啊
因为这个线圈它也是一种电感啊
不会电流不会突变的来进行续流
当你下次再打开,当它掉下来之后
下次在一个 PWM 周期再打开的时候
它又上去,那又碰到这个 IFS 又下来
所以它就不断地打开关掉,打开关掉 OK
OK 那这个电流的这个,这个调整功能
前面讲的那个细分
那这个细分的话就是
每 90 度里面的这个台阶的数量
那这个台阶是怎么做出来的话
其实就刚才用了我们这个电流调整功能
那这里面有多少个台阶
其实就取决于,你可以看下面这个图
OK 参考电压除于增益,和乘以这个采样电阻
那采样电阻增益都是固定的
那这个参考电压外面的话你给定一个值的话
那只能通过一个 DAC 来产生这样不同位
经过不同位数的 DAC 产生这样的台阶
OK 那这个台阶的数量其实就是 DAC 的这个位数
举个例子的话,如果 DAC 是三个比特的话
那刚好就是2的3次方,八个台阶
它就是八分之一细分
OK 如果是八比特的话
那就是二的八次方,256 个台阶
OK 所以它是通过
不管是内部还是外部的这个 DAC
然后提供这样的分档的这个参考电压
然后对这个电流进行分档
那这个步进电机的话
就是按照这个分档来进行
介绍一下这个步进电机简介这一块 嗯这个培训的话分两部分 第一部分的话主要介绍步进电机本身 那另外一部分的话就是步进电机的电控啊 主要就是说步进电机的电流的一个调整功能 这一页的话是步进电机的一个应用 步进电机是一个简单的开环的 一个位置和速度的一个控制 那基于这个控制的话 我们可以想得到啊一些比较经典的一些应用 比如说监控里面的这个摄像头啊 ATM 机 那冰箱里面的一些风门的一些控制 摇头的那个这个灯的一个控制 那打印机 3D 打印机里面会有非常多的步进电机 而还包括这个流量控制 或者阀门控制里面的电机,它也是步进电机 另外的话就是这个工业里面的一些应用 比如说这个纺织机械的一些产品 那这个的话就是说步进电机 它的一个结构可以看到 OK 右上角,那步进电机的话分两部分 中间这个的话是这个转子 外面这个线圈的话是这个定子 OK 那它的转子上面可以看到它开的这个齿槽 OK 它可以通过改变这个 定子线圈里面的这个电流的方向啊 产生这种磁场或者合成磁场 然后在驱动这个转子的这个磁铁旋转 OK 那步进电机的话它有一些优缺点 它的优点的话就说非常啊成熟 或者说价格非常低廉的一个 开环的速度和位置的一个控制 然后也非常容易去实现它的控制 算法比较简单 电机本身也是很可靠,OK 寿命也很长 然后它的这个扭矩也挺大 包括一些比较优秀的一些保持力矩等等 它的缺点的话就是说步进电机的话 其实从微观来看的话,走一步停一步 所以它会有一些噪音的问题,震动的问题 那另外的话就是步进电机 它是动态响应度会差一些 所以它的一些速度上的话可能转的效果不好 另外一个的话就是说这个大电感 或者说频繁的这种换相的话 它会限制步进电机这个转速 OK 步进电机的话 它的扭矩的纹波的话,它也会比较大一些 OK 然后步进电机的效率的话那肯定是低的 OK 这一页的话是这个步进电机全步的一个啊 一个运行的一个示意图 OK 可以看到,一般步进电机的话 主要现在目前是经典的话就是两相步进 OK 两相步进电机,A 相和 B 相 那给 A 相和 B 相 分别通不同方向的电的话 它其实会形成一个合成磁场 那从上面这个来看的话 它可以总共有四个方向的合成磁场 一个是右上那这个是右下,左下左上 那这是四个周期的话,刚好就是360度 就每一个的话是90度,那刚好走完这四步 那这里的每一步的话,我们叫一个大步 那一个周期的话就是四个大步 OK 这一页的话是一个半步的一个运行示意图 OK 半步的话其实分两种 那你可以看先看左边这个的话 就是2-1-2这种 那这个的话是在前面,看它全步的基础上 它又加了一个就是说只通 A 相,B 相不通电 它只有一个方向,这是一个磁场方向 那另外一个的话 接下来就是 AB 相合成磁场上 再接下来只有 B 相通电 然后再下面的话就 AB 相合成,然后再循环 所以它这样子的话是在这四个基础上 又加了四个的 AB 和 A反 和 B反 OK ,那同时可以看到啊 因为这里面每个电流它是百分之百输出的话 那这个 AB 合成的话 其实是B的大概根号二倍,1.4倍啊 所以你看到它每一步的话 其实每隔一步的话 它这个电流是不均匀的啊 就是一步小一步大,一步小一步大 OK 那右边这种这像右下图这个示意图的话 其实是一种更为常见的 就是说我们人为地去控制这个电流的比例 那它目的是什么呢,比如说 A 到 AB AB 合成的话,它的磁场啊 它这个扭矩的大小跟这个 A 是一样大 那就是说分别取 A 和 B 的根号1/2倍 大概就0.7多一些的这个电流 那合成 AB 的话就是跟 A 是一样的 那下面 A反 和 B反,AB反 和 AB反 都是一样 那这样的话就是说它可以这个半步的话 都是在一个同心的一个圆里面 它的半径都是一样的,它的扭矩是恒定的 那这样的话电机,步进电机转的话就会更加平稳 OK 声音的话也会更小一些 那在这个半步基础上的话 我们如果要做更多的细分的话啊 这里有个示意图,就是说举个例子 以八分之一细分来话 那我们只截取这个一个圆形的 这个四分就是一个大步90度 那在一个大步90度里面的话 它分成了八个小步,就是从 step1 到 step8 你可以看到 123452678 等等 那每一步的话 它刚才说的我们要保持着恒定的扭矩的话 那每一步的 A 相和 B 相的 合成的电流的话都是一样大的 那这个时候你就需要对 A 相的电流 B 相电流进行这样的一个分档 OK 那我们这样保证它们俩啊 不管是在哪一步的合成电流都是一样大的 OK 所以这里面的话 其实我们就做了一个这样的分档 OK 那如果把整个 A 相和 B 相电流波形 完整的拿出来看的话 可以看到 OK 那这里是 A 相这里是 B 相 它们相位的话差 90 度 那在每 1/4 啊,每90度的话,这是一个全步 那这里面全步里面的台阶数量 就是它的细分数量 OK 所以你可以看到步进,细分数越高的话 其实这个台阶的话其实是慢慢上涨 它的响应度是会慢一些的 那全步的话是会快一些,但全步带来问题 你可以看到啊 它的这个震荡会比较大一些 这里举个例子的话是以 DRV8818 来为例啊 8818 的话是最多是支持 1/8 细分的 一个步进电机驱动器 OK 它本身可以配成八分之一细分 或者说 1/4、半步,或者全步 那不同的这个细分数的话 这个是它这个电流波形的一个示意图 你可以看一下,那这个是全步 那半步的话,你可以看到 在这个 90 度周期里面就两个台阶一样 1/4 的话在这里就是 1234,那 1/8 的话 这个12345678 总共有八个步 所以说细分数越多的话 你可以看到它这个电机的这个每一步的话 它就是越接近于正弦波 OK 整个波形的话,就相对来说运行的更平稳 这一页的话是步进电机细分的一个总结 那左边的话是全步,右边的是这个半步 全步里面的话,其实这边的话是单相 单相的话现在其实用的很少 所以我们现在经常看的话都是两相的步进电机 那它那个优缺点就是说 优点就是说比较其实全步的话扭矩是最大 如果是 AB 相合成百分之百最大输出 如果你不去进行它的分档或者限流 OK 那控制非常简单,只有四个方向啊 它带来的缺点就是说 它会有很大的步与步切换的这个噪音 OK 然后这个震动也会比较大一些 半步的话,前面那一页也提到有两种 一个是2-1-2这种 它是非圆周形的扭矩不一样大的 OK 那这个当然它相对于全步来说 这些优点也是有的,就是说它因为它细分 步的精度会更高一些,会较少的一些震荡啊 然后运行得更平稳,控制计时也挺简单 唯一的一个缺点的话 就是说它这个扭矩的这个是不均匀的 这一步短一步长 OK 所以基于这个情况的话 我们就做了这个恒定转矩啊 这是一个圆周性的这样一个一个细分 那它的其它的好处的话 就在这个基础上又增加了 它的好处的话,其实跟那个一样 那唯一带来的话就是说 因为如果你细分数越多的话 因为它是要合成一样的这个电流大小 所以说它在比如说在零度或者在90度的话 那其中一项电流是非常小的 那这个时候的话就需要一个很小的 或者说很精确控制的一个电流 那下面这个的话是步进电机的一个总结 那不管是从全步、半步、1/4 到最高 到更高 250 的或更高,这个细分数的话 就是越高那你这个运行理论上的话 就转动会越平稳,会越安静一些 然后因为你的步数越高 那你每一个大步除以这个细分数 就是你每一个细分数的度数当然就会越小 所以它的精度会越高 OK 那另外一个的话 就是它这个噪音水平的话也会得到改善 OK 当然细分数越高的话 它就需要比较复杂或者是 高阶的一些电流的控制功能 那这里面可能就需要比特数比较高的 这些 AD,DAC 啊等等 OK 那我们从这个页开始来讲一下 这个电流调整功能 那这个的话可以看到啊 就是说这是一个电流 那电流的话,其实一个线圈的话 它其实分两部分 那这个是它的正常的工作或者充电的一个方式 那这个的话是放电啊 我们在 Decay 续流模式 再驱动再放电,再驱动再放电 OK ,那这里面有个 IFS 的话 就等于说我们这个限流值 那这个限流值的话是有个公式来计算 就是参考电压除以这个内部有个小运放 内部增益 Av ,再乘以这个外部的采样电阻 OK 那你这个当你这个采样电阻的 这个参考电压设定以后 这个 IFS 就是设定了 那当你这个线圈比,不管是 A 相和 B 相 当你工作的时候 对这个线圈进行电流方向的这个控制 当你下一个关掉 off 的时候 当到了这个电流的时候你就把它关掉 那这个时候就续流啊 因为这个线圈它也是一种电感啊 不会电流不会突变的来进行续流 当你下次再打开,当它掉下来之后 下次在一个 PWM 周期再打开的时候 它又上去,那又碰到这个 IFS 又下来 所以它就不断地打开关掉,打开关掉 OK OK 那这个电流的这个,这个调整功能 前面讲的那个细分 那这个细分的话就是 每 90 度里面的这个台阶的数量 那这个台阶是怎么做出来的话 其实就刚才用了我们这个电流调整功能 那这里面有多少个台阶 其实就取决于,你可以看下面这个图 OK 参考电压除于增益,和乘以这个采样电阻 那采样电阻增益都是固定的 那这个参考电压外面的话你给定一个值的话 那只能通过一个 DAC 来产生这样不同位 经过不同位数的 DAC 产生这样的台阶 OK 那这个台阶的数量其实就是 DAC 的这个位数 举个例子的话,如果 DAC 是三个比特的话 那刚好就是2的3次方,八个台阶 它就是八分之一细分 OK 如果是八比特的话 那就是二的八次方,256 个台阶 OK 所以它是通过 不管是内部还是外部的这个 DAC 然后提供这样的分档的这个参考电压 然后对这个电流进行分档 那这个步进电机的话 就是按照这个分档来进行
介绍一下这个步进电机简介这一块
嗯这个培训的话分两部分
第一部分的话主要介绍步进电机本身
那另外一部分的话就是步进电机的电控啊
主要就是说步进电机的电流的一个调整功能
这一页的话是步进电机的一个应用
步进电机是一个简单的开环的
一个位置和速度的一个控制
那基于这个控制的话
我们可以想得到啊一些比较经典的一些应用
比如说监控里面的这个摄像头啊 ATM 机
那冰箱里面的一些风门的一些控制
摇头的那个这个灯的一个控制
那打印机 3D 打印机里面会有非常多的步进电机
而还包括这个流量控制
或者阀门控制里面的电机,它也是步进电机
另外的话就是这个工业里面的一些应用
比如说这个纺织机械的一些产品
那这个的话就是说步进电机
它的一个结构可以看到
OK 右上角,那步进电机的话分两部分
中间这个的话是这个转子
外面这个线圈的话是这个定子
OK 那它的转子上面可以看到它开的这个齿槽
OK 它可以通过改变这个
定子线圈里面的这个电流的方向啊
产生这种磁场或者合成磁场
然后在驱动这个转子的这个磁铁旋转
OK 那步进电机的话它有一些优缺点
它的优点的话就说非常啊成熟
或者说价格非常低廉的一个
开环的速度和位置的一个控制
然后也非常容易去实现它的控制
算法比较简单
电机本身也是很可靠,OK 寿命也很长
然后它的这个扭矩也挺大
包括一些比较优秀的一些保持力矩等等
它的缺点的话就是说步进电机的话
其实从微观来看的话,走一步停一步
所以它会有一些噪音的问题,震动的问题
那另外的话就是步进电机
它是动态响应度会差一些
所以它的一些速度上的话可能转的效果不好
另外一个的话就是说这个大电感
或者说频繁的这种换相的话
它会限制步进电机这个转速
OK 步进电机的话
它的扭矩的纹波的话,它也会比较大一些
OK 然后步进电机的效率的话那肯定是低的
OK 这一页的话是这个步进电机全步的一个啊
一个运行的一个示意图
OK 可以看到,一般步进电机的话
主要现在目前是经典的话就是两相步进
OK 两相步进电机,A 相和 B 相
那给 A 相和 B 相
分别通不同方向的电的话
它其实会形成一个合成磁场
那从上面这个来看的话
它可以总共有四个方向的合成磁场
一个是右上那这个是右下,左下左上
那这是四个周期的话,刚好就是360度
就每一个的话是90度,那刚好走完这四步
那这里的每一步的话,我们叫一个大步
那一个周期的话就是四个大步
OK 这一页的话是一个半步的一个运行示意图
OK 半步的话其实分两种
那你可以看先看左边这个的话
就是2-1-2这种
那这个的话是在前面,看它全步的基础上
它又加了一个就是说只通 A 相,B 相不通电
它只有一个方向,这是一个磁场方向
那另外一个的话
接下来就是 AB 相合成磁场上
再接下来只有 B 相通电
然后再下面的话就 AB 相合成,然后再循环
所以它这样子的话是在这四个基础上
又加了四个的 AB 和 A反 和 B反
OK ,那同时可以看到啊
因为这里面每个电流它是百分之百输出的话
那这个 AB 合成的话
其实是B的大概根号二倍,1.4倍啊
所以你看到它每一步的话
其实每隔一步的话
它这个电流是不均匀的啊
就是一步小一步大,一步小一步大
OK 那右边这种这像右下图这个示意图的话
其实是一种更为常见的
就是说我们人为地去控制这个电流的比例
那它目的是什么呢,比如说 A 到 AB
AB 合成的话,它的磁场啊
它这个扭矩的大小跟这个 A 是一样大
那就是说分别取 A 和 B 的根号1/2倍
大概就0.7多一些的这个电流
那合成 AB 的话就是跟 A 是一样的
那下面 A反 和 B反,AB反 和 AB反 都是一样
那这样的话就是说它可以这个半步的话
都是在一个同心的一个圆里面
它的半径都是一样的,它的扭矩是恒定的
那这样的话电机,步进电机转的话就会更加平稳
OK 声音的话也会更小一些
那在这个半步基础上的话
我们如果要做更多的细分的话啊
这里有个示意图,就是说举个例子
以八分之一细分来话
那我们只截取这个一个圆形的
这个四分就是一个大步90度
那在一个大步90度里面的话
它分成了八个小步,就是从 step1 到 step8
你可以看到 123452678 等等
那每一步的话
它刚才说的我们要保持着恒定的扭矩的话
那每一步的 A 相和 B 相的
合成的电流的话都是一样大的
那这个时候你就需要对 A 相的电流
B 相电流进行这样的一个分档
OK 那我们这样保证它们俩啊
不管是在哪一步的合成电流都是一样大的
OK 所以这里面的话
其实我们就做了一个这样的分档
OK 那如果把整个 A 相和 B 相电流波形
完整的拿出来看的话
可以看到 OK 那这里是 A 相这里是 B 相
它们相位的话差 90 度
那在每 1/4 啊,每90度的话,这是一个全步
那这里面全步里面的台阶数量
就是它的细分数量
OK 所以你可以看到步进,细分数越高的话
其实这个台阶的话其实是慢慢上涨
它的响应度是会慢一些的
那全步的话是会快一些,但全步带来问题
你可以看到啊
它的这个震荡会比较大一些
这里举个例子的话是以 DRV8818 来为例啊
8818 的话是最多是支持 1/8 细分的
一个步进电机驱动器
OK 它本身可以配成八分之一细分
或者说 1/4、半步,或者全步
那不同的这个细分数的话
这个是它这个电流波形的一个示意图
你可以看一下,那这个是全步
那半步的话,你可以看到
在这个 90 度周期里面就两个台阶一样
1/4 的话在这里就是 1234,那 1/8 的话
这个12345678 总共有八个步
所以说细分数越多的话
你可以看到它这个电机的这个每一步的话
它就是越接近于正弦波
OK 整个波形的话,就相对来说运行的更平稳
这一页的话是步进电机细分的一个总结
那左边的话是全步,右边的是这个半步
全步里面的话,其实这边的话是单相
单相的话现在其实用的很少
所以我们现在经常看的话都是两相的步进电机
那它那个优缺点就是说
优点就是说比较其实全步的话扭矩是最大
如果是 AB 相合成百分之百最大输出
如果你不去进行它的分档或者限流
OK 那控制非常简单,只有四个方向啊
它带来的缺点就是说
它会有很大的步与步切换的这个噪音
OK 然后这个震动也会比较大一些
半步的话,前面那一页也提到有两种
一个是2-1-2这种
它是非圆周形的扭矩不一样大的
OK 那这个当然它相对于全步来说
这些优点也是有的,就是说它因为它细分
步的精度会更高一些,会较少的一些震荡啊
然后运行得更平稳,控制计时也挺简单
唯一的一个缺点的话
就是说它这个扭矩的这个是不均匀的
这一步短一步长
OK 所以基于这个情况的话
我们就做了这个恒定转矩啊
这是一个圆周性的这样一个一个细分
那它的其它的好处的话
就在这个基础上又增加了
它的好处的话,其实跟那个一样
那唯一带来的话就是说
因为如果你细分数越多的话
因为它是要合成一样的这个电流大小
所以说它在比如说在零度或者在90度的话
那其中一项电流是非常小的
那这个时候的话就需要一个很小的
或者说很精确控制的一个电流
那下面这个的话是步进电机的一个总结
那不管是从全步、半步、1/4 到最高
到更高 250 的或更高,这个细分数的话
就是越高那你这个运行理论上的话
就转动会越平稳,会越安静一些
然后因为你的步数越高
那你每一个大步除以这个细分数
就是你每一个细分数的度数当然就会越小
所以它的精度会越高
OK 那另外一个的话
就是它这个噪音水平的话也会得到改善
OK 当然细分数越高的话
它就需要比较复杂或者是
高阶的一些电流的控制功能
那这里面可能就需要比特数比较高的
这些 AD,DAC 啊等等
OK 那我们从这个页开始来讲一下
这个电流调整功能
那这个的话可以看到啊
就是说这是一个电流
那电流的话,其实一个线圈的话
它其实分两部分
那这个是它的正常的工作或者充电的一个方式
那这个的话是放电啊
我们在 Decay 续流模式
再驱动再放电,再驱动再放电
OK ,那这里面有个 IFS 的话
就等于说我们这个限流值
那这个限流值的话是有个公式来计算
就是参考电压除以这个内部有个小运放
内部增益 Av ,再乘以这个外部的采样电阻
OK 那你这个当你这个采样电阻的
这个参考电压设定以后
这个 IFS 就是设定了
那当你这个线圈比,不管是 A 相和 B 相
当你工作的时候
对这个线圈进行电流方向的这个控制
当你下一个关掉 off 的时候
当到了这个电流的时候你就把它关掉
那这个时候就续流啊
因为这个线圈它也是一种电感啊
不会电流不会突变的来进行续流
当你下次再打开,当它掉下来之后
下次在一个 PWM 周期再打开的时候
它又上去,那又碰到这个 IFS 又下来
所以它就不断地打开关掉,打开关掉 OK
OK 那这个电流的这个,这个调整功能
前面讲的那个细分
那这个细分的话就是
每 90 度里面的这个台阶的数量
那这个台阶是怎么做出来的话
其实就刚才用了我们这个电流调整功能
那这里面有多少个台阶
其实就取决于,你可以看下面这个图
OK 参考电压除于增益,和乘以这个采样电阻
那采样电阻增益都是固定的
那这个参考电压外面的话你给定一个值的话
那只能通过一个 DAC 来产生这样不同位
经过不同位数的 DAC 产生这样的台阶
OK 那这个台阶的数量其实就是 DAC 的这个位数
举个例子的话,如果 DAC 是三个比特的话
那刚好就是2的3次方,八个台阶
它就是八分之一细分
OK 如果是八比特的话
那就是二的八次方,256 个台阶
OK 所以它是通过
不管是内部还是外部的这个 DAC
然后提供这样的分档的这个参考电压
然后对这个电流进行分档
那这个步进电机的话
就是按照这个分档来进行
手机看
扫码用手机观看
 视频简介
视频简介
步进电机简介
所属课程:步进电机简介以及步进电机控制技术的最新趋势
发布时间:2016.10.31
视频集数:2
本节视频时长:00:11:16
本视频介绍了步进电机控制和驱动的基本原理,细分/微步控制以及微步与全步的优缺点对比,同时着重说明了电机驱动中的细节控制技术,包含电流调整功能、续流模式(慢、快、混合和自动)以及各模式的对比、TI专利技术AutoTune功能、TI驱动集成电流采样功能等。