1.4汽车设计的嵌入式创新
Loading the player...
将在30s后自动为您播放下一课程
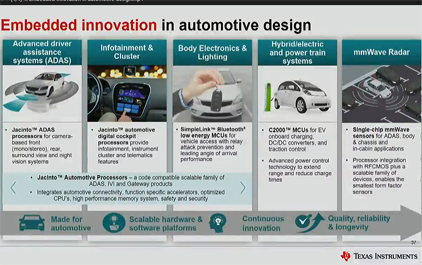
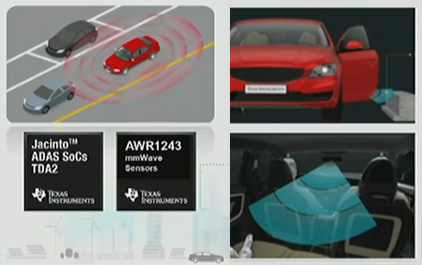
好,现在我们这里可以看到 我们这页的Slide 它其实主要是给到我们的 那个Jacinto家族的Processor 它的多数应用场景 这里是我们ADAS的Processor 它主要是应用于我们的 基于上头的一个ADAS应用 比如说我们单目或者双目的前视 倒车后视 然后还有我们2D或3D的环视 然后还有夜视的一些系统 那这里面会有我们的一个 Infotainment Processor 它可以提供的一些是用于中控 然后有仪表盘 还有Telematics的一些性能 接着我们会有一个... 这个里面可能要说明一下 就是说这个后续的这些可能是 我们汽车处理器家族里面的一员 但可能和我们的这个Jacinto系统 可能是有一些差异 这里头我简单就是说一下 这里有一个SimpleLink 低功耗蓝牙集成的一个MCU 可以用来去做一些近车检测 以及无钥进车 无钥是开车门的这些方案 然后C2000的MCU主要是运用于 我们现在比较火的一个... 电动车的车载的充电、DC/DC转换 然后还有牵引力控制的这些功能 最主要它是我们这个C2000 因为它性能比较强大 所以它就是说能够提高这个 可以帮助车场去在单车上提高这个 续航能力以及减少它的充电次数 可以提高车辆的使用寿命 那最后一个是我们单芯片的 毫米波雷达的一个Sensor 这里面的单芯片是指 我们只需要增加一个外部的天线 就可以完成整个的雷达功能 这主要是使用在我们的车内 或者车外的人员和障碍物的检测 或者是我们车内的生命体征检测 主要可用于DMSL 这样的一个驾驶员检测系统 这里就简单的介绍了一下 就是说这个Processor它是可以... 因为刚才所说的它只需要接到 外界天线它就可以做到完整的场景 所以它是可以做到 非常、非常小的一个尺寸 这里面其实我还要特别说明一点 我们这里面的话 因为我们是一个家族 对于Jacinto来说是一个家族 所以这里面我也强调一点的是 我们是可扩展的硬件 我们后续会说明一下 我们是怎样实现这个比较大范围 或者是说比较宽范围的 一个可扩展的能力 另外我们会有自己的一个 叫的[听不清]SDK 这样的话可以帮助大家缩短研发周期 这里我要给出Jacinto的汽车处理器 它的三条产品线当中 它的应用场景和一些特点 那我现在要说明的是 我们这边左边的这个 大家可以在我们TI的官网上可以看到 TDA开头的这一系列 这一系列主要是应用于ADAS的应用 左边的这一类 其实我觉得在我们现在的 L1、L2的这类智能驾驶应用 和大部分的应用都可能用上 比如说我们这里的叫DMS Driver Monitor System 还有Surround View 2D或3D的 这已经是比较普遍了 中国的车都会有这样的配置 这里还有一个我们的毫米波雷达 和激光雷达的一些方案 然后有我们低功耗的 一个前视摄像、前视系统 然后还有多数据来源的数据融合 这里面另外一个就是我们叫 智能的[听不清]后视镜 的一些应用 右边是我们DRA前缀的一个产品线 这块产品线主要是 应用于Infotainment系统 和一些Cluster应用 比如说我们现在的Center Stack 这样的一个中控 和Cluster以及 中控和Cluster组合的CockPit 这样的智能驾驶舱的一些应用 这里面还要有一个说明 就是这是一个后座娱乐系统 叫Rear Seat的后座娱乐系统 Silverbox类似于T-Box的功能 然后这里面还有就是我们所讲的 除了ADAS、Infotainment之外的 第三条产品线 就是我們的Gateway這块 以及V2X/V2V 好我现在要简单说明一下 刚才我们为什么提到硬件上的 可扩展性 对于我们整的Jacinto扩展器来说 它的主要特点是多核易Go系统 多核指的是 我们有多颗MCU、多颗GPU 然后DSP,还有我们的辅助的MPU AMPU,还有加速器 易Go就是我们可以在 每一处的MPU或者 AMPU类似于比如说M4上面 我们可以跑单独的一个系统 这里我们可以简单的说明一下 这里是说我们会有多核 单核或多核的MPU可以去提高这个... Scalability就是可扩展性 然后还有它的变换能力 另外一个就是说我们可以单独 刚才我们也提到了就是我们可以 把分别的就是MPU当中 比如说某个单颗MPU或者一处的MPU 用来去支持多操作系统或者 多Domain的软体架构 这里面再要说明一下 因为我们大部分市场上的一些 车载的Processor 可能配置上 相较于我们这边有一些差异 我们主要的特点是可以把在MPU 或者GPU上的一些Workloading 可以通过算法移植去Upload到DSP 和我们比如揭露上的[听不清] 和我们机器上的我们新一代 [听不清]叫做[听不清]等加速器上 这里就是我们提到的我们可以去做到 主CPU、主处理器 主核上的一些Workloading 可以分散到其他的核上 以降低整体的功耗 和提高软件的... 降低软件的复杂度 好这里面还有一个是我们要 特别提到我们这里面有一个叫 辅助的一个MPU 我们内部叫M4 揭露上会叫M4,机器上会有一个R5F 它是可以用来做一些实时的处理 包括像Auto-stop的一些应用可以 去满足我们现在现有的一些 现有的就是 车厂对产品的Safety的要求 好这里面就是说一下 我们第三就是刚才提到的 在Jacinto家族里面会 有第三条产品线就是 做网络Gateway的功能 在右边这张图就是给出了 我们现有的一些... 就是车辆上面使用的一些网路架构 左边这里是一个Telematics的 一个控制单元 然后在我们的右下方 会有Powertrain Domain 还有底盘的控制 然后还有智能驾驶舱 ADAS以及Body Electronics Domain 而这里要提到一条现有的 因为它的数据就每个Domain之间 数据交互以及数据处理的 需求量比较不是非常大 所以大家在现有的这个框架里面 这些Domain之间的交互 可能只是用CAN或是LIN去来做 那么在可以预见的是 我们智能驾驶这个应用场景 会越来越多的时候 那么对于这个大数据量 这个Domain之间大数据量的 数据传输来说就是需求量会增加 所以在这几个Domain之间 的传输数据量可能会由于 这些自动驾驶应用的加入 所以导致它会有大幅度的提高 那么这里对于我们的[听不清]来说 它就需要有更高的计算能力 和更强大的一些比如说对接于 [听不清]对接于[听不清] 这样的一些技术能力 好这里面是我们的 现在第三条产品线Gateway 这个产品线里面给出 已经有样片的一款Gateway处理器 你们可以在我们的TI.com官网上 直接搜索到 你可以用这个关键词 可以直接搜索到 我在这里面要插一句简单的 TI.com上这里面会有一些 我们这颗片子的一些参数 你可以看到它的一些配置参数 比如说有多少外设 然后Call有几个 类似于这样的 这里面会有我们所有的技术资料 包括这里面的data value 也会包括 它给出的一些Reference Design 还有我们的一些叫 Technical Reference Domain 就是说对我们里面每颗核 核里面的IP、外设的IP的一些 详细介绍 那在tools跟software这里面会提供的 是我们Reference的EVM的一些设计 和相关的一些SDK软件 这里都是免费的、Free的 在support&training里面你们可以 去找到一部分的就是视频资料 training的资料和文档 好我们这里面是接下来是我们 就这款Gateway处理器我们考虑的 一个Telematics系统 Telematics它其实 从字面意思上来讲就是 远程的数据处理、信息处理 那么这样的话就会很明显地看到 我们这里面的数据就包括了我车内的 和车外的信息处理 信息交换 那么这样的话最主要的是 我们4G和5G的技术 然后还有GPS 和BLE、WiFi、V2X 这些途径进来的从车外进来的数据 以及我们车内的数据 车内的数据现有的 大部分都是一个CAN还有一个LIN 但是在后续的就是刚刚所说的 比如说我们[听不清]驾驶的 这些场景下来 那么Ethernet要求的这个高数据量 高数据通同量的 这个需求可能会慢慢增大 那么这时候也是需要 我们在传统的车载网关 里面MCU的处理能力相对于较弱 所以在这个大数据量需求的场景下 那么这个Processor 就是一个必要的选项了 然后这里面我们给出了一个简要方案 在右下端的这张图里 框图里我们可以看到 实际上对于大部分的像GPS V2X然后Audio 还有惯性的一些测量单元之类 我们都是由外部的一个Module来完成 那实际上对于我们考虑的Gateway 就是Telematics应用场景下的 一个Gateway处理器 能力那它是可以做到一些 比如说我们需要有一个HSM 去做信息的加紧密 去保证它的Security 然后我们会有一些加速器 ECDSA比如说 椭圆曲线的一个DSA算法 一个加速器来加速 这个信息加紧密的运算 然后我们在里面 会有一个Ethernet Part 或者是说包括 有一个Ethernet的Switch的能力 一个IP在里面 去满足我们后续对Ethernet这种 高通同量的数据端口的需求 这里面还有一个我们会自己 在[听不清]有一个单独的MCU Domain 来做一些CAN和LIN的数据转发 稍微要提一点我们这里面的MCU 的Domain和我们这一整块的 叫Main Domain之间 是彻底分离的 包括电源、包括时钟 也就是说我们在MCU 可以这么理解就是在Main Domain 这些功能都在... 工作的情况下可以保证我们MCU 是可以一直在工作 好这里是我们的 你们可以在TI.com上找到的那颗 刚才我们提到的Gateway Processor 一些配置参数 刚才也提到了我们这颗里面 会有一个MCU的Iceland 它其实是与我们左边这一侧的 Main Domain之间是 可以理解成是一个物理隔离 在其中它会有一个的[听不清]两核 或者是四核的一个R5F的... 一个... 一个... 一个小的处理器单元 MCU的单元 会有两级的比如说在我们TI804 它是 然后另外一个就是在我们右端的 这个Main Domain里面 它会有一个A53的这样一个配置差异 DRA804M会有两组 共四颗A53的核 然后在DRA802M 会提供的是一组两核 两颗A53的核 这样的话就可以去 就是在MPU的这端处理能力上 可以做出一些区分 然后大家都可以看到我们在MCU這端 它是有一个512K内部的Memory 这样的话有助于我们系统的快速启动 对于ECC来说我们在所有 Critical的Memory上都会有支持 这样的话就可以满足 我们后续对Safety的要求 我们在这颗芯片上 现在是支持LPDDR4 然后通同率是1600 这里我还要提到一点 我们的这一颗就是 这一颗就是网关产品线里面 它的主要一个 比较重要一个特性叫 Multicore Navigator TeraNet 这个总线你可以看到它 实际上是架设在MCU和MPU 和Main Domain之间 然后还有和其他的外设之间的 一个数据总线 那么它是可以提供软件去解析 这个总线上传输数据的包头 然后通过指针方式去交换数据 也极大的提高了这个总线的通同量 好Security这块就是必要的 比如说我们Secure Boot还有 还有一些加减密的运算 然后还有TrsutZone 这是现在比较常用的 在Processor的方式 Processor里面去实现安全的方式 Ethernet是我们刚才提到的 在我们的Gateway里面是一个就是 为了我们后续的网关升级 所增加的一个Feature 可以看到我们这里面是有 最大是有到6颗的 Data Bit Ethernet Ports 可以 数据通同量非常大 另外在MCU的Domain里面 我们会有一个单独的一颗 1G Data Bit Ethernet Ports 这样的话可以在一些MCU 仅仅MCU的工作场景下也可以 去支持到网络应用网络的一些功能 另外我们下面是一些比较... 常见的一些Connectivity的功能 比如说有PCIe、USB还有CAN FD 还有MMC的功能可以支持到UHS-I的 还有Octal-SPI 这里面可以支持SIP的一些 所以说在这里面... 我们会有一些 比较可以去支持快速启动的 一些硬件上的特性 好接下来就是我们刚才所说的 我们是想要给出一些就是 基于我们这颗网关Gateway的 Processor的一个Demo 大家都知道这其实是一个 开放式的SOC的一个应用 它主要是说我从外部传进来的数据包 网路数据包经过 我们的MCU Domain里的R5F 的上面这个协议站的处理 处理完需要去解密 解密完处理完再加密 然后再把它数据再传出 这个端口 你可以看到我们在右边看到 实际上在这里可以看到 我们R5F的Workloading Workloading大概是在30%左右 而这一颗Ethernet Port的数据通同量 是接近1个GB 所以说一方面来说我们实际上 对于我们Ethernet Port 它的数据通同量能够达到飙升 另外一个在我们MCU Domain里面 是可以处理很多Workload 或者说[听不清]来做其他应用 甚至来说我们在这种应用情景下 A53是完全空出来的 所以我们认为说在这个 Gateway Processor来说 我们或许可以在Gateway 这个功能上我们可以增加 更多的一些新的Feature 它因为有足够的一些计算资源在那 好这里是我们刚才所说的 一些点 其实刚才已经说了就是 这个点在你们当中其实是加了 Crypto Accelerator 这样的一个处理 OK 这里面是这样子的就是 因为我们Gateway这样的应用来说 它对这个Security和Safety应用来说 要求比较高 那么我们常用的比如说 Autosar的[听不清]来说 是用来做一些Safety相关的一些应用 然后又因为是传统网关上 它的数据处理量会比较少一点 那么... 传统的Autosar它是可以满足 这样的一些处理能力 但是在后续的如果说比如说自动驾驶 如果说[听不清]处理的更多了 那么这样的话就是说 在Gateway上来说它 可能就会有一些大个数据量处理 比如说我们刚刚所说的一个图像交互 另外一个还有车内的... 各个控制单元的OTA的升级 那么这样就会有大量的数据交互 这个时候就说我们业内是有 一个在Classic Autosar 这块是和它有一个对等的 Adaptive Autosar 这样的一个实现 那它们的差异主要是在于 我们Adaptive Autosar 是为了提高它的计算能力 提高它的数据处理能力 那么是建立于我们所讲的叫 High Level的OS 也比如说是[听不清] 比如说是QS 那么这样的话就可以提高我们 整车的整个设备的这些 Safety、Security的一些特性 跟一些特点 那你可以看到 大家可以看到这里面是说 我们这颗芯片 会有一个多核易购的系统 那么我们可以在MCU Domain上 可以去支持这个Classic Autosar 然后在我们的Main Domain的 Cortext A53上面 可以去支持我们的Adaptive Autosar 那么另外一个就是我们刚才提到的 我们TI内会有一个TRX 这样一个高速的数据总线 然后和建立在这之上的IPC的 Fundamental的一个软件基础 我们可以实现到Adaptive Autosar 和Classic Autosar之间的一个通信 然后这里面最重要的一点 就是之前刚刚提到的 我们的MCU Island 可以作为一个Safety Controller 也就是说即使在这一端 Main Domain这一端 如果系统Crash了 那么它并不会引起我们这个 MCU这端任何的异常 好 最后要强调一点就是说 我们自己这一款的产品线其实 在除了我刚才列出来的 DRA804M和802M 我们后续会有更加丰富的一些 网关处理器的一些芯片 那么也就是说我们可以去 现有的应用和未来的一些 更加复杂的一些应用 那同时我们会提供相关的SDK 那我们的SDK可以做到 不同配置的处理器上 都可以同时应用 和减少这样软件的一些研发工作 好 那基本上我们的 主要内容都已经讲完了 希望大家多多关注 我们的一些活动 谢谢 谢谢大家
好,现在我们这里可以看到 我们这页的Slide 它其实主要是给到我们的 那个Jacinto家族的Processor 它的多数应用场景 这里是我们ADAS的Processor 它主要是应用于我们的 基于上头的一个ADAS应用 比如说我们单目或者双目的前视 倒车后视 然后还有我们2D或3D的环视 然后还有夜视的一些系统 那这里面会有我们的一个 Infotainment Processor 它可以提供的一些是用于中控 然后有仪表盘 还有Telematics的一些性能 接着我们会有一个... 这个里面可能要说明一下 就是说这个后续的这些可能是 我们汽车处理器家族里面的一员 但可能和我们的这个Jacinto系统 可能是有一些差异 这里头我简单就是说一下 这里有一个SimpleLink 低功耗蓝牙集成的一个MCU 可以用来去做一些近车检测 以及无钥进车 无钥是开车门的这些方案 然后C2000的MCU主要是运用于 我们现在比较火的一个... 电动车的车载的充电、DC/DC转换 然后还有牵引力控制的这些功能 最主要它是我们这个C2000 因为它性能比较强大 所以它就是说能够提高这个 可以帮助车场去在单车上提高这个 续航能力以及减少它的充电次数 可以提高车辆的使用寿命 那最后一个是我们单芯片的 毫米波雷达的一个Sensor 这里面的单芯片是指 我们只需要增加一个外部的天线 就可以完成整个的雷达功能 这主要是使用在我们的车内 或者车外的人员和障碍物的检测 或者是我们车内的生命体征检测 主要可用于DMSL 这样的一个驾驶员检测系统 这里就简单的介绍了一下 就是说这个Processor它是可以... 因为刚才所说的它只需要接到 外界天线它就可以做到完整的场景 所以它是可以做到 非常、非常小的一个尺寸 这里面其实我还要特别说明一点 我们这里面的话 因为我们是一个家族 对于Jacinto来说是一个家族 所以这里面我也强调一点的是 我们是可扩展的硬件 我们后续会说明一下 我们是怎样实现这个比较大范围 或者是说比较宽范围的 一个可扩展的能力 另外我们会有自己的一个 叫的[听不清]SDK 这样的话可以帮助大家缩短研发周期 这里我要给出Jacinto的汽车处理器 它的三条产品线当中 它的应用场景和一些特点 那我现在要说明的是 我们这边左边的这个 大家可以在我们TI的官网上可以看到 TDA开头的这一系列 这一系列主要是应用于ADAS的应用 左边的这一类 其实我觉得在我们现在的 L1、L2的这类智能驾驶应用 和大部分的应用都可能用上 比如说我们这里的叫DMS Driver Monitor System 还有Surround View 2D或3D的 这已经是比较普遍了 中国的车都会有这样的配置 这里还有一个我们的毫米波雷达 和激光雷达的一些方案 然后有我们低功耗的 一个前视摄像、前视系统 然后还有多数据来源的数据融合 这里面另外一个就是我们叫 智能的[听不清]后视镜 的一些应用 右边是我们DRA前缀的一个产品线 这块产品线主要是 应用于Infotainment系统 和一些Cluster应用 比如说我们现在的Center Stack 这样的一个中控 和Cluster以及 中控和Cluster组合的CockPit 这样的智能驾驶舱的一些应用 这里面还要有一个说明 就是这是一个后座娱乐系统 叫Rear Seat的后座娱乐系统 Silverbox类似于T-Box的功能 然后这里面还有就是我们所讲的 除了ADAS、Infotainment之外的 第三条产品线 就是我們的Gateway這块 以及V2X/V2V 好我现在要简单说明一下 刚才我们为什么提到硬件上的 可扩展性 对于我们整的Jacinto扩展器来说 它的主要特点是多核易Go系统 多核指的是 我们有多颗MCU、多颗GPU 然后DSP,还有我们的辅助的MPU AMPU,还有加速器 易Go就是我们可以在 每一处的MPU或者 AMPU类似于比如说M4上面 我们可以跑单独的一个系统 这里我们可以简单的说明一下 这里是说我们会有多核 单核或多核的MPU可以去提高这个... Scalability就是可扩展性 然后还有它的变换能力 另外一个就是说我们可以单独 刚才我们也提到了就是我们可以 把分别的就是MPU当中 比如说某个单颗MPU或者一处的MPU 用来去支持多操作系统或者 多Domain的软体架构 这里面再要说明一下 因为我们大部分市场上的一些 车载的Processor 可能配置上 相较于我们这边有一些差异 我们主要的特点是可以把在MPU 或者GPU上的一些Workloading 可以通过算法移植去Upload到DSP 和我们比如揭露上的[听不清] 和我们机器上的我们新一代 [听不清]叫做[听不清]等加速器上 这里就是我们提到的我们可以去做到 主CPU、主处理器 主核上的一些Workloading 可以分散到其他的核上 以降低整体的功耗 和提高软件的... 降低软件的复杂度 好这里面还有一个是我们要 特别提到我们这里面有一个叫 辅助的一个MPU 我们内部叫M4 揭露上会叫M4,机器上会有一个R5F 它是可以用来做一些实时的处理 包括像Auto-stop的一些应用可以 去满足我们现在现有的一些 现有的就是 车厂对产品的Safety的要求 好这里面就是说一下 我们第三就是刚才提到的 在Jacinto家族里面会 有第三条产品线就是 做网络Gateway的功能 在右边这张图就是给出了 我们现有的一些... 就是车辆上面使用的一些网路架构 左边这里是一个Telematics的 一个控制单元 然后在我们的右下方 会有Powertrain Domain 还有底盘的控制 然后还有智能驾驶舱 ADAS以及Body Electronics Domain 而这里要提到一条现有的 因为它的数据就每个Domain之间 数据交互以及数据处理的 需求量比较不是非常大 所以大家在现有的这个框架里面 这些Domain之间的交互 可能只是用CAN或是LIN去来做 那么在可以预见的是 我们智能驾驶这个应用场景 会越来越多的时候 那么对于这个大数据量 这个Domain之间大数据量的 数据传输来说就是需求量会增加 所以在这几个Domain之间 的传输数据量可能会由于 这些自动驾驶应用的加入 所以导致它会有大幅度的提高 那么这里对于我们的[听不清]来说 它就需要有更高的计算能力 和更强大的一些比如说对接于 [听不清]对接于[听不清] 这样的一些技术能力 好这里面是我们的 现在第三条产品线Gateway 这个产品线里面给出 已经有样片的一款Gateway处理器 你们可以在我们的TI.com官网上 直接搜索到 你可以用这个关键词 可以直接搜索到 我在这里面要插一句简单的 TI.com上这里面会有一些 我们这颗片子的一些参数 你可以看到它的一些配置参数 比如说有多少外设 然后Call有几个 类似于这样的 这里面会有我们所有的技术资料 包括这里面的data value 也会包括 它给出的一些Reference Design 还有我们的一些叫 Technical Reference Domain 就是说对我们里面每颗核 核里面的IP、外设的IP的一些 详细介绍 那在tools跟software这里面会提供的 是我们Reference的EVM的一些设计 和相关的一些SDK软件 这里都是免费的、Free的 在support&training里面你们可以 去找到一部分的就是视频资料 training的资料和文档 好我们这里面是接下来是我们 就这款Gateway处理器我们考虑的 一个Telematics系统 Telematics它其实 从字面意思上来讲就是 远程的数据处理、信息处理 那么这样的话就会很明显地看到 我们这里面的数据就包括了我车内的 和车外的信息处理 信息交换 那么这样的话最主要的是 我们4G和5G的技术 然后还有GPS 和BLE、WiFi、V2X 这些途径进来的从车外进来的数据 以及我们车内的数据 车内的数据现有的 大部分都是一个CAN还有一个LIN 但是在后续的就是刚刚所说的 比如说我们[听不清]驾驶的 这些场景下来 那么Ethernet要求的这个高数据量 高数据通同量的 这个需求可能会慢慢增大 那么这时候也是需要 我们在传统的车载网关 里面MCU的处理能力相对于较弱 所以在这个大数据量需求的场景下 那么这个Processor 就是一个必要的选项了 然后这里面我们给出了一个简要方案 在右下端的这张图里 框图里我们可以看到 实际上对于大部分的像GPS V2X然后Audio 还有惯性的一些测量单元之类 我们都是由外部的一个Module来完成 那实际上对于我们考虑的Gateway 就是Telematics应用场景下的 一个Gateway处理器 能力那它是可以做到一些 比如说我们需要有一个HSM 去做信息的加紧密 去保证它的Security 然后我们会有一些加速器 ECDSA比如说 椭圆曲线的一个DSA算法 一个加速器来加速 这个信息加紧密的运算 然后我们在里面 会有一个Ethernet Part 或者是说包括 有一个Ethernet的Switch的能力 一个IP在里面 去满足我们后续对Ethernet这种 高通同量的数据端口的需求 这里面还有一个我们会自己 在[听不清]有一个单独的MCU Domain 来做一些CAN和LIN的数据转发 稍微要提一点我们这里面的MCU 的Domain和我们这一整块的 叫Main Domain之间 是彻底分离的 包括电源、包括时钟 也就是说我们在MCU 可以这么理解就是在Main Domain 这些功能都在... 工作的情况下可以保证我们MCU 是可以一直在工作 好这里是我们的 你们可以在TI.com上找到的那颗 刚才我们提到的Gateway Processor 一些配置参数 刚才也提到了我们这颗里面 会有一个MCU的Iceland 它其实是与我们左边这一侧的 Main Domain之间是 可以理解成是一个物理隔离 在其中它会有一个的[听不清]两核 或者是四核的一个R5F的... 一个... 一个... 一个小的处理器单元 MCU的单元 会有两级的比如说在我们TI804 它是 然后另外一个就是在我们右端的 这个Main Domain里面 它会有一个A53的这样一个配置差异 DRA804M会有两组 共四颗A53的核 然后在DRA802M 会提供的是一组两核 两颗A53的核 这样的话就可以去 就是在MPU的这端处理能力上 可以做出一些区分 然后大家都可以看到我们在MCU這端 它是有一个512K内部的Memory 这样的话有助于我们系统的快速启动 对于ECC来说我们在所有 Critical的Memory上都会有支持 这样的话就可以满足 我们后续对Safety的要求 我们在这颗芯片上 现在是支持LPDDR4 然后通同率是1600 这里我还要提到一点 我们的这一颗就是 这一颗就是网关产品线里面 它的主要一个 比较重要一个特性叫 Multicore Navigator TeraNet 这个总线你可以看到它 实际上是架设在MCU和MPU 和Main Domain之间 然后还有和其他的外设之间的 一个数据总线 那么它是可以提供软件去解析 这个总线上传输数据的包头 然后通过指针方式去交换数据 也极大的提高了这个总线的通同量 好Security这块就是必要的 比如说我们Secure Boot还有 还有一些加减密的运算 然后还有TrsutZone 这是现在比较常用的 在Processor的方式 Processor里面去实现安全的方式 Ethernet是我们刚才提到的 在我们的Gateway里面是一个就是 为了我们后续的网关升级 所增加的一个Feature 可以看到我们这里面是有 最大是有到6颗的 Data Bit Ethernet Ports 可以 数据通同量非常大 另外在MCU的Domain里面 我们会有一个单独的一颗 1G Data Bit Ethernet Ports 这样的话可以在一些MCU 仅仅MCU的工作场景下也可以 去支持到网络应用网络的一些功能 另外我们下面是一些比较... 常见的一些Connectivity的功能 比如说有PCIe、USB还有CAN FD 还有MMC的功能可以支持到UHS-I的 还有Octal-SPI 这里面可以支持SIP的一些 所以说在这里面... 我们会有一些 比较可以去支持快速启动的 一些硬件上的特性 好接下来就是我们刚才所说的 我们是想要给出一些就是 基于我们这颗网关Gateway的 Processor的一个Demo 大家都知道这其实是一个 开放式的SOC的一个应用 它主要是说我从外部传进来的数据包 网路数据包经过 我们的MCU Domain里的R5F 的上面这个协议站的处理 处理完需要去解密 解密完处理完再加密 然后再把它数据再传出 这个端口 你可以看到我们在右边看到 实际上在这里可以看到 我们R5F的Workloading Workloading大概是在30%左右 而这一颗Ethernet Port的数据通同量 是接近1个GB 所以说一方面来说我们实际上 对于我们Ethernet Port 它的数据通同量能够达到飙升 另外一个在我们MCU Domain里面 是可以处理很多Workload 或者说[听不清]来做其他应用 甚至来说我们在这种应用情景下 A53是完全空出来的 所以我们认为说在这个 Gateway Processor来说 我们或许可以在Gateway 这个功能上我们可以增加 更多的一些新的Feature 它因为有足够的一些计算资源在那 好这里是我们刚才所说的 一些点 其实刚才已经说了就是 这个点在你们当中其实是加了 Crypto Accelerator 这样的一个处理 OK 这里面是这样子的就是 因为我们Gateway这样的应用来说 它对这个Security和Safety应用来说 要求比较高 那么我们常用的比如说 Autosar的[听不清]来说 是用来做一些Safety相关的一些应用 然后又因为是传统网关上 它的数据处理量会比较少一点 那么... 传统的Autosar它是可以满足 这样的一些处理能力 但是在后续的如果说比如说自动驾驶 如果说[听不清]处理的更多了 那么这样的话就是说 在Gateway上来说它 可能就会有一些大个数据量处理 比如说我们刚刚所说的一个图像交互 另外一个还有车内的... 各个控制单元的OTA的升级 那么这样就会有大量的数据交互 这个时候就说我们业内是有 一个在Classic Autosar 这块是和它有一个对等的 Adaptive Autosar 这样的一个实现 那它们的差异主要是在于 我们Adaptive Autosar 是为了提高它的计算能力 提高它的数据处理能力 那么是建立于我们所讲的叫 High Level的OS 也比如说是[听不清] 比如说是QS 那么这样的话就可以提高我们 整车的整个设备的这些 Safety、Security的一些特性 跟一些特点 那你可以看到 大家可以看到这里面是说 我们这颗芯片 会有一个多核易购的系统 那么我们可以在MCU Domain上 可以去支持这个Classic Autosar 然后在我们的Main Domain的 Cortext A53上面 可以去支持我们的Adaptive Autosar 那么另外一个就是我们刚才提到的 我们TI内会有一个TRX 这样一个高速的数据总线 然后和建立在这之上的IPC的 Fundamental的一个软件基础 我们可以实现到Adaptive Autosar 和Classic Autosar之间的一个通信 然后这里面最重要的一点 就是之前刚刚提到的 我们的MCU Island 可以作为一个Safety Controller 也就是说即使在这一端 Main Domain这一端 如果系统Crash了 那么它并不会引起我们这个 MCU这端任何的异常 好 最后要强调一点就是说 我们自己这一款的产品线其实 在除了我刚才列出来的 DRA804M和802M 我们后续会有更加丰富的一些 网关处理器的一些芯片 那么也就是说我们可以去 现有的应用和未来的一些 更加复杂的一些应用 那同时我们会提供相关的SDK 那我们的SDK可以做到 不同配置的处理器上 都可以同时应用 和减少这样软件的一些研发工作 好 那基本上我们的 主要内容都已经讲完了 希望大家多多关注 我们的一些活动 谢谢 谢谢大家
好,现在我们这里可以看到
我们这页的Slide 它其实主要是给到我们的
那个Jacinto家族的Processor
它的多数应用场景
这里是我们ADAS的Processor
它主要是应用于我们的 基于上头的一个ADAS应用
比如说我们单目或者双目的前视
倒车后视 然后还有我们2D或3D的环视
然后还有夜视的一些系统
那这里面会有我们的一个 Infotainment Processor
它可以提供的一些是用于中控
然后有仪表盘 还有Telematics的一些性能
接着我们会有一个... 这个里面可能要说明一下
就是说这个后续的这些可能是 我们汽车处理器家族里面的一员
但可能和我们的这个Jacinto系统 可能是有一些差异
这里头我简单就是说一下 这里有一个SimpleLink
低功耗蓝牙集成的一个MCU 可以用来去做一些近车检测
以及无钥进车
无钥是开车门的这些方案
然后C2000的MCU主要是运用于 我们现在比较火的一个...
电动车的车载的充电、DC/DC转换
然后还有牵引力控制的这些功能
最主要它是我们这个C2000 因为它性能比较强大
所以它就是说能够提高这个 可以帮助车场去在单车上提高这个
续航能力以及减少它的充电次数 可以提高车辆的使用寿命
那最后一个是我们单芯片的 毫米波雷达的一个Sensor
这里面的单芯片是指 我们只需要增加一个外部的天线
就可以完成整个的雷达功能
这主要是使用在我们的车内 或者车外的人员和障碍物的检测
或者是我们车内的生命体征检测
主要可用于DMSL 这样的一个驾驶员检测系统
这里就简单的介绍了一下
就是说这个Processor它是可以...
因为刚才所说的它只需要接到 外界天线它就可以做到完整的场景
所以它是可以做到 非常、非常小的一个尺寸
这里面其实我还要特别说明一点
我们这里面的话 因为我们是一个家族
对于Jacinto来说是一个家族
所以这里面我也强调一点的是 我们是可扩展的硬件
我们后续会说明一下 我们是怎样实现这个比较大范围
或者是说比较宽范围的 一个可扩展的能力
另外我们会有自己的一个 叫的[听不清]SDK
这样的话可以帮助大家缩短研发周期
这里我要给出Jacinto的汽车处理器
它的三条产品线当中
它的应用场景和一些特点
那我现在要说明的是 我们这边左边的这个
大家可以在我们TI的官网上可以看到
TDA开头的这一系列
这一系列主要是应用于ADAS的应用
左边的这一类
其实我觉得在我们现在的 L1、L2的这类智能驾驶应用
和大部分的应用都可能用上
比如说我们这里的叫DMS Driver Monitor System
还有Surround View 2D或3D的 这已经是比较普遍了
中国的车都会有这样的配置
这里还有一个我们的毫米波雷达 和激光雷达的一些方案
然后有我们低功耗的 一个前视摄像、前视系统
然后还有多数据来源的数据融合
这里面另外一个就是我们叫 智能的[听不清]后视镜
的一些应用
右边是我们DRA前缀的一个产品线
这块产品线主要是 应用于Infotainment系统
和一些Cluster应用
比如说我们现在的Center Stack 这样的一个中控
和Cluster以及 中控和Cluster组合的CockPit
这样的智能驾驶舱的一些应用
这里面还要有一个说明
就是这是一个后座娱乐系统
叫Rear Seat的后座娱乐系统
Silverbox类似于T-Box的功能
然后这里面还有就是我们所讲的
除了ADAS、Infotainment之外的 第三条产品线
就是我們的Gateway這块
以及V2X/V2V
好我现在要简单说明一下 刚才我们为什么提到硬件上的
可扩展性
对于我们整的Jacinto扩展器来说
它的主要特点是多核易Go系统
多核指的是 我们有多颗MCU、多颗GPU
然后DSP,还有我们的辅助的MPU
AMPU,还有加速器
易Go就是我们可以在 每一处的MPU或者
AMPU类似于比如说M4上面 我们可以跑单独的一个系统
这里我们可以简单的说明一下
这里是说我们会有多核
单核或多核的MPU可以去提高这个...
Scalability就是可扩展性
然后还有它的变换能力
另外一个就是说我们可以单独 刚才我们也提到了就是我们可以
把分别的就是MPU当中 比如说某个单颗MPU或者一处的MPU
用来去支持多操作系统或者
多Domain的软体架构
这里面再要说明一下 因为我们大部分市场上的一些
车载的Processor
可能配置上 相较于我们这边有一些差异
我们主要的特点是可以把在MPU
或者GPU上的一些Workloading
可以通过算法移植去Upload到DSP
和我们比如揭露上的[听不清] 和我们机器上的我们新一代
[听不清]叫做[听不清]等加速器上
这里就是我们提到的我们可以去做到
主CPU、主处理器 主核上的一些Workloading
可以分散到其他的核上
以降低整体的功耗
和提高软件的...
降低软件的复杂度
好这里面还有一个是我们要 特别提到我们这里面有一个叫
辅助的一个MPU
我们内部叫M4
揭露上会叫M4,机器上会有一个R5F
它是可以用来做一些实时的处理
包括像Auto-stop的一些应用可以 去满足我们现在现有的一些
现有的就是 车厂对产品的Safety的要求
好这里面就是说一下
我们第三就是刚才提到的 在Jacinto家族里面会
有第三条产品线就是 做网络Gateway的功能
在右边这张图就是给出了 我们现有的一些...
就是车辆上面使用的一些网路架构
左边这里是一个Telematics的 一个控制单元
然后在我们的右下方
会有Powertrain Domain
还有底盘的控制 然后还有智能驾驶舱
ADAS以及Body Electronics Domain
而这里要提到一条现有的 因为它的数据就每个Domain之间
数据交互以及数据处理的 需求量比较不是非常大
所以大家在现有的这个框架里面
这些Domain之间的交互 可能只是用CAN或是LIN去来做
那么在可以预见的是
我们智能驾驶这个应用场景 会越来越多的时候
那么对于这个大数据量 这个Domain之间大数据量的
数据传输来说就是需求量会增加
所以在这几个Domain之间
的传输数据量可能会由于 这些自动驾驶应用的加入
所以导致它会有大幅度的提高
那么这里对于我们的[听不清]来说
它就需要有更高的计算能力
和更强大的一些比如说对接于
[听不清]对接于[听不清]
这样的一些技术能力
好这里面是我们的 现在第三条产品线Gateway
这个产品线里面给出
已经有样片的一款Gateway处理器
你们可以在我们的TI.com官网上 直接搜索到
你可以用这个关键词 可以直接搜索到
我在这里面要插一句简单的
TI.com上这里面会有一些 我们这颗片子的一些参数
你可以看到它的一些配置参数
比如说有多少外设 然后Call有几个
类似于这样的
这里面会有我们所有的技术资料 包括这里面的data value
也会包括 它给出的一些Reference Design
还有我们的一些叫 Technical Reference Domain
就是说对我们里面每颗核 核里面的IP、外设的IP的一些
详细介绍
那在tools跟software这里面会提供的 是我们Reference的EVM的一些设计
和相关的一些SDK软件
这里都是免费的、Free的
在support&training里面你们可以 去找到一部分的就是视频资料
training的资料和文档
好我们这里面是接下来是我们
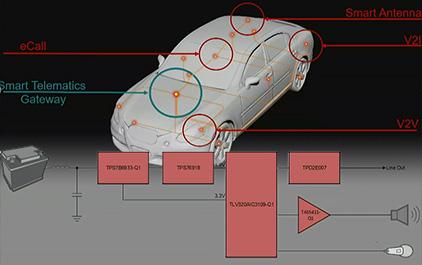
就这款Gateway处理器我们考虑的 一个Telematics系统
Telematics它其实 从字面意思上来讲就是
远程的数据处理、信息处理
那么这样的话就会很明显地看到
我们这里面的数据就包括了我车内的
和车外的信息处理
信息交换 那么这样的话最主要的是
我们4G和5G的技术 然后还有GPS
和BLE、WiFi、V2X
这些途径进来的从车外进来的数据
以及我们车内的数据
车内的数据现有的 大部分都是一个CAN还有一个LIN
但是在后续的就是刚刚所说的
比如说我们[听不清]驾驶的 这些场景下来
那么Ethernet要求的这个高数据量
高数据通同量的 这个需求可能会慢慢增大
那么这时候也是需要 我们在传统的车载网关
里面MCU的处理能力相对于较弱
所以在这个大数据量需求的场景下
那么这个Processor 就是一个必要的选项了
然后这里面我们给出了一个简要方案
在右下端的这张图里
框图里我们可以看到 实际上对于大部分的像GPS
V2X然后Audio 还有惯性的一些测量单元之类
我们都是由外部的一个Module来完成
那实际上对于我们考虑的Gateway
就是Telematics应用场景下的 一个Gateway处理器
能力那它是可以做到一些
比如说我们需要有一个HSM 去做信息的加紧密
去保证它的Security
然后我们会有一些加速器
ECDSA比如说 椭圆曲线的一个DSA算法
一个加速器来加速 这个信息加紧密的运算
然后我们在里面 会有一个Ethernet Part
或者是说包括 有一个Ethernet的Switch的能力
一个IP在里面
去满足我们后续对Ethernet这种
高通同量的数据端口的需求
这里面还有一个我们会自己 在[听不清]有一个单独的MCU Domain
来做一些CAN和LIN的数据转发
稍微要提一点我们这里面的MCU
的Domain和我们这一整块的 叫Main Domain之间
是彻底分离的
包括电源、包括时钟
也就是说我们在MCU 可以这么理解就是在Main Domain
这些功能都在...
工作的情况下可以保证我们MCU 是可以一直在工作
好这里是我们的 你们可以在TI.com上找到的那颗
刚才我们提到的Gateway Processor
一些配置参数
刚才也提到了我们这颗里面 会有一个MCU的Iceland
它其实是与我们左边这一侧的 Main Domain之间是
可以理解成是一个物理隔离
在其中它会有一个的[听不清]两核
或者是四核的一个R5F的...
一个... 一个...
一个小的处理器单元
MCU的单元
会有两级的比如说在我们TI804
它是
然后另外一个就是在我们右端的 这个Main Domain里面
它会有一个A53的这样一个配置差异
DRA804M会有两组
共四颗A53的核
然后在DRA802M 会提供的是一组两核
两颗A53的核 这样的话就可以去
就是在MPU的这端处理能力上
可以做出一些区分
然后大家都可以看到我们在MCU這端
它是有一个512K内部的Memory
这样的话有助于我们系统的快速启动
对于ECC来说我们在所有 Critical的Memory上都会有支持
这样的话就可以满足 我们后续对Safety的要求
我们在这颗芯片上 现在是支持LPDDR4
然后通同率是1600
这里我还要提到一点 我们的这一颗就是
这一颗就是网关产品线里面 它的主要一个
比较重要一个特性叫
Multicore Navigator TeraNet
这个总线你可以看到它
实际上是架设在MCU和MPU
和Main Domain之间
然后还有和其他的外设之间的 一个数据总线
那么它是可以提供软件去解析 这个总线上传输数据的包头
然后通过指针方式去交换数据
也极大的提高了这个总线的通同量
好Security这块就是必要的 比如说我们Secure Boot还有
还有一些加减密的运算 然后还有TrsutZone
这是现在比较常用的 在Processor的方式
Processor里面去实现安全的方式
Ethernet是我们刚才提到的 在我们的Gateway里面是一个就是
为了我们后续的网关升级
所增加的一个Feature
可以看到我们这里面是有 最大是有到6颗的
Data Bit Ethernet Ports
可以 数据通同量非常大
另外在MCU的Domain里面 我们会有一个单独的一颗
1G Data Bit Ethernet Ports 这样的话可以在一些MCU
仅仅MCU的工作场景下也可以 去支持到网络应用网络的一些功能
另外我们下面是一些比较...
常见的一些Connectivity的功能
比如说有PCIe、USB还有CAN FD
还有MMC的功能可以支持到UHS-I的
还有Octal-SPI 这里面可以支持SIP的一些
所以说在这里面...
我们会有一些 比较可以去支持快速启动的
一些硬件上的特性
好接下来就是我们刚才所说的 我们是想要给出一些就是
基于我们这颗网关Gateway的
Processor的一个Demo
大家都知道这其实是一个 开放式的SOC的一个应用
它主要是说我从外部传进来的数据包
网路数据包经过 我们的MCU Domain里的R5F
的上面这个协议站的处理 处理完需要去解密
解密完处理完再加密
然后再把它数据再传出
这个端口
你可以看到我们在右边看到
实际上在这里可以看到 我们R5F的Workloading
Workloading大概是在30%左右
而这一颗Ethernet Port的数据通同量
是接近1个GB
所以说一方面来说我们实际上 对于我们Ethernet Port
它的数据通同量能够达到飙升
另外一个在我们MCU Domain里面
是可以处理很多Workload 或者说[听不清]来做其他应用
甚至来说我们在这种应用情景下 A53是完全空出来的
所以我们认为说在这个 Gateway Processor来说
我们或许可以在Gateway
这个功能上我们可以增加 更多的一些新的Feature
它因为有足够的一些计算资源在那
好这里是我们刚才所说的
一些点
其实刚才已经说了就是
这个点在你们当中其实是加了 Crypto Accelerator
这样的一个处理
OK
这里面是这样子的就是
因为我们Gateway这样的应用来说
它对这个Security和Safety应用来说 要求比较高
那么我们常用的比如说
Autosar的[听不清]来说
是用来做一些Safety相关的一些应用
然后又因为是传统网关上 它的数据处理量会比较少一点
那么...
传统的Autosar它是可以满足 这样的一些处理能力
但是在后续的如果说比如说自动驾驶
如果说[听不清]处理的更多了
那么这样的话就是说 在Gateway上来说它
可能就会有一些大个数据量处理
比如说我们刚刚所说的一个图像交互
另外一个还有车内的...
各个控制单元的OTA的升级
那么这样就会有大量的数据交互
这个时候就说我们业内是有 一个在Classic Autosar
这块是和它有一个对等的 Adaptive Autosar
这样的一个实现
那它们的差异主要是在于
我们Adaptive Autosar 是为了提高它的计算能力
提高它的数据处理能力
那么是建立于我们所讲的叫 High Level的OS
也比如说是[听不清] 比如说是QS
那么这样的话就可以提高我们
整车的整个设备的这些 Safety、Security的一些特性
跟一些特点
那你可以看到 大家可以看到这里面是说
我们这颗芯片 会有一个多核易购的系统
那么我们可以在MCU Domain上
可以去支持这个Classic Autosar
然后在我们的Main Domain的 Cortext A53上面
可以去支持我们的Adaptive Autosar
那么另外一个就是我们刚才提到的 我们TI内会有一个TRX
这样一个高速的数据总线
然后和建立在这之上的IPC的
Fundamental的一个软件基础
我们可以实现到Adaptive Autosar
和Classic Autosar之间的一个通信
然后这里面最重要的一点 就是之前刚刚提到的
我们的MCU Island 可以作为一个Safety Controller
也就是说即使在这一端
Main Domain这一端
如果系统Crash了
那么它并不会引起我们这个
MCU这端任何的异常
好
最后要强调一点就是说 我们自己这一款的产品线其实
在除了我刚才列出来的 DRA804M和802M
我们后续会有更加丰富的一些
网关处理器的一些芯片
那么也就是说我们可以去
现有的应用和未来的一些 更加复杂的一些应用
那同时我们会提供相关的SDK
那我们的SDK可以做到 不同配置的处理器上
都可以同时应用
和减少这样软件的一些研发工作
好
那基本上我们的 主要内容都已经讲完了
希望大家多多关注 我们的一些活动
谢谢
谢谢大家
好,现在我们这里可以看到 我们这页的Slide 它其实主要是给到我们的 那个Jacinto家族的Processor 它的多数应用场景 这里是我们ADAS的Processor 它主要是应用于我们的 基于上头的一个ADAS应用 比如说我们单目或者双目的前视 倒车后视 然后还有我们2D或3D的环视 然后还有夜视的一些系统 那这里面会有我们的一个 Infotainment Processor 它可以提供的一些是用于中控 然后有仪表盘 还有Telematics的一些性能 接着我们会有一个... 这个里面可能要说明一下 就是说这个后续的这些可能是 我们汽车处理器家族里面的一员 但可能和我们的这个Jacinto系统 可能是有一些差异 这里头我简单就是说一下 这里有一个SimpleLink 低功耗蓝牙集成的一个MCU 可以用来去做一些近车检测 以及无钥进车 无钥是开车门的这些方案 然后C2000的MCU主要是运用于 我们现在比较火的一个... 电动车的车载的充电、DC/DC转换 然后还有牵引力控制的这些功能 最主要它是我们这个C2000 因为它性能比较强大 所以它就是说能够提高这个 可以帮助车场去在单车上提高这个 续航能力以及减少它的充电次数 可以提高车辆的使用寿命 那最后一个是我们单芯片的 毫米波雷达的一个Sensor 这里面的单芯片是指 我们只需要增加一个外部的天线 就可以完成整个的雷达功能 这主要是使用在我们的车内 或者车外的人员和障碍物的检测 或者是我们车内的生命体征检测 主要可用于DMSL 这样的一个驾驶员检测系统 这里就简单的介绍了一下 就是说这个Processor它是可以... 因为刚才所说的它只需要接到 外界天线它就可以做到完整的场景 所以它是可以做到 非常、非常小的一个尺寸 这里面其实我还要特别说明一点 我们这里面的话 因为我们是一个家族 对于Jacinto来说是一个家族 所以这里面我也强调一点的是 我们是可扩展的硬件 我们后续会说明一下 我们是怎样实现这个比较大范围 或者是说比较宽范围的 一个可扩展的能力 另外我们会有自己的一个 叫的[听不清]SDK 这样的话可以帮助大家缩短研发周期 这里我要给出Jacinto的汽车处理器 它的三条产品线当中 它的应用场景和一些特点 那我现在要说明的是 我们这边左边的这个 大家可以在我们TI的官网上可以看到 TDA开头的这一系列 这一系列主要是应用于ADAS的应用 左边的这一类 其实我觉得在我们现在的 L1、L2的这类智能驾驶应用 和大部分的应用都可能用上 比如说我们这里的叫DMS Driver Monitor System 还有Surround View 2D或3D的 这已经是比较普遍了 中国的车都会有这样的配置 这里还有一个我们的毫米波雷达 和激光雷达的一些方案 然后有我们低功耗的 一个前视摄像、前视系统 然后还有多数据来源的数据融合 这里面另外一个就是我们叫 智能的[听不清]后视镜 的一些应用 右边是我们DRA前缀的一个产品线 这块产品线主要是 应用于Infotainment系统 和一些Cluster应用 比如说我们现在的Center Stack 这样的一个中控 和Cluster以及 中控和Cluster组合的CockPit 这样的智能驾驶舱的一些应用 这里面还要有一个说明 就是这是一个后座娱乐系统 叫Rear Seat的后座娱乐系统 Silverbox类似于T-Box的功能 然后这里面还有就是我们所讲的 除了ADAS、Infotainment之外的 第三条产品线 就是我們的Gateway這块 以及V2X/V2V 好我现在要简单说明一下 刚才我们为什么提到硬件上的 可扩展性 对于我们整的Jacinto扩展器来说 它的主要特点是多核易Go系统 多核指的是 我们有多颗MCU、多颗GPU 然后DSP,还有我们的辅助的MPU AMPU,还有加速器 易Go就是我们可以在 每一处的MPU或者 AMPU类似于比如说M4上面 我们可以跑单独的一个系统 这里我们可以简单的说明一下 这里是说我们会有多核 单核或多核的MPU可以去提高这个... Scalability就是可扩展性 然后还有它的变换能力 另外一个就是说我们可以单独 刚才我们也提到了就是我们可以 把分别的就是MPU当中 比如说某个单颗MPU或者一处的MPU 用来去支持多操作系统或者 多Domain的软体架构 这里面再要说明一下 因为我们大部分市场上的一些 车载的Processor 可能配置上 相较于我们这边有一些差异 我们主要的特点是可以把在MPU 或者GPU上的一些Workloading 可以通过算法移植去Upload到DSP 和我们比如揭露上的[听不清] 和我们机器上的我们新一代 [听不清]叫做[听不清]等加速器上 这里就是我们提到的我们可以去做到 主CPU、主处理器 主核上的一些Workloading 可以分散到其他的核上 以降低整体的功耗 和提高软件的... 降低软件的复杂度 好这里面还有一个是我们要 特别提到我们这里面有一个叫 辅助的一个MPU 我们内部叫M4 揭露上会叫M4,机器上会有一个R5F 它是可以用来做一些实时的处理 包括像Auto-stop的一些应用可以 去满足我们现在现有的一些 现有的就是 车厂对产品的Safety的要求 好这里面就是说一下 我们第三就是刚才提到的 在Jacinto家族里面会 有第三条产品线就是 做网络Gateway的功能 在右边这张图就是给出了 我们现有的一些... 就是车辆上面使用的一些网路架构 左边这里是一个Telematics的 一个控制单元 然后在我们的右下方 会有Powertrain Domain 还有底盘的控制 然后还有智能驾驶舱 ADAS以及Body Electronics Domain 而这里要提到一条现有的 因为它的数据就每个Domain之间 数据交互以及数据处理的 需求量比较不是非常大 所以大家在现有的这个框架里面 这些Domain之间的交互 可能只是用CAN或是LIN去来做 那么在可以预见的是 我们智能驾驶这个应用场景 会越来越多的时候 那么对于这个大数据量 这个Domain之间大数据量的 数据传输来说就是需求量会增加 所以在这几个Domain之间 的传输数据量可能会由于 这些自动驾驶应用的加入 所以导致它会有大幅度的提高 那么这里对于我们的[听不清]来说 它就需要有更高的计算能力 和更强大的一些比如说对接于 [听不清]对接于[听不清] 这样的一些技术能力 好这里面是我们的 现在第三条产品线Gateway 这个产品线里面给出 已经有样片的一款Gateway处理器 你们可以在我们的TI.com官网上 直接搜索到 你可以用这个关键词 可以直接搜索到 我在这里面要插一句简单的 TI.com上这里面会有一些 我们这颗片子的一些参数 你可以看到它的一些配置参数 比如说有多少外设 然后Call有几个 类似于这样的 这里面会有我们所有的技术资料 包括这里面的data value 也会包括 它给出的一些Reference Design 还有我们的一些叫 Technical Reference Domain 就是说对我们里面每颗核 核里面的IP、外设的IP的一些 详细介绍 那在tools跟software这里面会提供的 是我们Reference的EVM的一些设计 和相关的一些SDK软件 这里都是免费的、Free的 在support&training里面你们可以 去找到一部分的就是视频资料 training的资料和文档 好我们这里面是接下来是我们 就这款Gateway处理器我们考虑的 一个Telematics系统 Telematics它其实 从字面意思上来讲就是 远程的数据处理、信息处理 那么这样的话就会很明显地看到 我们这里面的数据就包括了我车内的 和车外的信息处理 信息交换 那么这样的话最主要的是 我们4G和5G的技术 然后还有GPS 和BLE、WiFi、V2X 这些途径进来的从车外进来的数据 以及我们车内的数据 车内的数据现有的 大部分都是一个CAN还有一个LIN 但是在后续的就是刚刚所说的 比如说我们[听不清]驾驶的 这些场景下来 那么Ethernet要求的这个高数据量 高数据通同量的 这个需求可能会慢慢增大 那么这时候也是需要 我们在传统的车载网关 里面MCU的处理能力相对于较弱 所以在这个大数据量需求的场景下 那么这个Processor 就是一个必要的选项了 然后这里面我们给出了一个简要方案 在右下端的这张图里 框图里我们可以看到 实际上对于大部分的像GPS V2X然后Audio 还有惯性的一些测量单元之类 我们都是由外部的一个Module来完成 那实际上对于我们考虑的Gateway 就是Telematics应用场景下的 一个Gateway处理器 能力那它是可以做到一些 比如说我们需要有一个HSM 去做信息的加紧密 去保证它的Security 然后我们会有一些加速器 ECDSA比如说 椭圆曲线的一个DSA算法 一个加速器来加速 这个信息加紧密的运算 然后我们在里面 会有一个Ethernet Part 或者是说包括 有一个Ethernet的Switch的能力 一个IP在里面 去满足我们后续对Ethernet这种 高通同量的数据端口的需求 这里面还有一个我们会自己 在[听不清]有一个单独的MCU Domain 来做一些CAN和LIN的数据转发 稍微要提一点我们这里面的MCU 的Domain和我们这一整块的 叫Main Domain之间 是彻底分离的 包括电源、包括时钟 也就是说我们在MCU 可以这么理解就是在Main Domain 这些功能都在... 工作的情况下可以保证我们MCU 是可以一直在工作 好这里是我们的 你们可以在TI.com上找到的那颗 刚才我们提到的Gateway Processor 一些配置参数 刚才也提到了我们这颗里面 会有一个MCU的Iceland 它其实是与我们左边这一侧的 Main Domain之间是 可以理解成是一个物理隔离 在其中它会有一个的[听不清]两核 或者是四核的一个R5F的... 一个... 一个... 一个小的处理器单元 MCU的单元 会有两级的比如说在我们TI804 它是 然后另外一个就是在我们右端的 这个Main Domain里面 它会有一个A53的这样一个配置差异 DRA804M会有两组 共四颗A53的核 然后在DRA802M 会提供的是一组两核 两颗A53的核 这样的话就可以去 就是在MPU的这端处理能力上 可以做出一些区分 然后大家都可以看到我们在MCU這端 它是有一个512K内部的Memory 这样的话有助于我们系统的快速启动 对于ECC来说我们在所有 Critical的Memory上都会有支持 这样的话就可以满足 我们后续对Safety的要求 我们在这颗芯片上 现在是支持LPDDR4 然后通同率是1600 这里我还要提到一点 我们的这一颗就是 这一颗就是网关产品线里面 它的主要一个 比较重要一个特性叫 Multicore Navigator TeraNet 这个总线你可以看到它 实际上是架设在MCU和MPU 和Main Domain之间 然后还有和其他的外设之间的 一个数据总线 那么它是可以提供软件去解析 这个总线上传输数据的包头 然后通过指针方式去交换数据 也极大的提高了这个总线的通同量 好Security这块就是必要的 比如说我们Secure Boot还有 还有一些加减密的运算 然后还有TrsutZone 这是现在比较常用的 在Processor的方式 Processor里面去实现安全的方式 Ethernet是我们刚才提到的 在我们的Gateway里面是一个就是 为了我们后续的网关升级 所增加的一个Feature 可以看到我们这里面是有 最大是有到6颗的 Data Bit Ethernet Ports 可以 数据通同量非常大 另外在MCU的Domain里面 我们会有一个单独的一颗 1G Data Bit Ethernet Ports 这样的话可以在一些MCU 仅仅MCU的工作场景下也可以 去支持到网络应用网络的一些功能 另外我们下面是一些比较... 常见的一些Connectivity的功能 比如说有PCIe、USB还有CAN FD 还有MMC的功能可以支持到UHS-I的 还有Octal-SPI 这里面可以支持SIP的一些 所以说在这里面... 我们会有一些 比较可以去支持快速启动的 一些硬件上的特性 好接下来就是我们刚才所说的 我们是想要给出一些就是 基于我们这颗网关Gateway的 Processor的一个Demo 大家都知道这其实是一个 开放式的SOC的一个应用 它主要是说我从外部传进来的数据包 网路数据包经过 我们的MCU Domain里的R5F 的上面这个协议站的处理 处理完需要去解密 解密完处理完再加密 然后再把它数据再传出 这个端口 你可以看到我们在右边看到 实际上在这里可以看到 我们R5F的Workloading Workloading大概是在30%左右 而这一颗Ethernet Port的数据通同量 是接近1个GB 所以说一方面来说我们实际上 对于我们Ethernet Port 它的数据通同量能够达到飙升 另外一个在我们MCU Domain里面 是可以处理很多Workload 或者说[听不清]来做其他应用 甚至来说我们在这种应用情景下 A53是完全空出来的 所以我们认为说在这个 Gateway Processor来说 我们或许可以在Gateway 这个功能上我们可以增加 更多的一些新的Feature 它因为有足够的一些计算资源在那 好这里是我们刚才所说的 一些点 其实刚才已经说了就是 这个点在你们当中其实是加了 Crypto Accelerator 这样的一个处理 OK 这里面是这样子的就是 因为我们Gateway这样的应用来说 它对这个Security和Safety应用来说 要求比较高 那么我们常用的比如说 Autosar的[听不清]来说 是用来做一些Safety相关的一些应用 然后又因为是传统网关上 它的数据处理量会比较少一点 那么... 传统的Autosar它是可以满足 这样的一些处理能力 但是在后续的如果说比如说自动驾驶 如果说[听不清]处理的更多了 那么这样的话就是说 在Gateway上来说它 可能就会有一些大个数据量处理 比如说我们刚刚所说的一个图像交互 另外一个还有车内的... 各个控制单元的OTA的升级 那么这样就会有大量的数据交互 这个时候就说我们业内是有 一个在Classic Autosar 这块是和它有一个对等的 Adaptive Autosar 这样的一个实现 那它们的差异主要是在于 我们Adaptive Autosar 是为了提高它的计算能力 提高它的数据处理能力 那么是建立于我们所讲的叫 High Level的OS 也比如说是[听不清] 比如说是QS 那么这样的话就可以提高我们 整车的整个设备的这些 Safety、Security的一些特性 跟一些特点 那你可以看到 大家可以看到这里面是说 我们这颗芯片 会有一个多核易购的系统 那么我们可以在MCU Domain上 可以去支持这个Classic Autosar 然后在我们的Main Domain的 Cortext A53上面 可以去支持我们的Adaptive Autosar 那么另外一个就是我们刚才提到的 我们TI内会有一个TRX 这样一个高速的数据总线 然后和建立在这之上的IPC的 Fundamental的一个软件基础 我们可以实现到Adaptive Autosar 和Classic Autosar之间的一个通信 然后这里面最重要的一点 就是之前刚刚提到的 我们的MCU Island 可以作为一个Safety Controller 也就是说即使在这一端 Main Domain这一端 如果系统Crash了 那么它并不会引起我们这个 MCU这端任何的异常 好 最后要强调一点就是说 我们自己这一款的产品线其实 在除了我刚才列出来的 DRA804M和802M 我们后续会有更加丰富的一些 网关处理器的一些芯片 那么也就是说我们可以去 现有的应用和未来的一些 更加复杂的一些应用 那同时我们会提供相关的SDK 那我们的SDK可以做到 不同配置的处理器上 都可以同时应用 和减少这样软件的一些研发工作 好 那基本上我们的 主要内容都已经讲完了 希望大家多多关注 我们的一些活动 谢谢 谢谢大家
好,现在我们这里可以看到
我们这页的Slide 它其实主要是给到我们的
那个Jacinto家族的Processor
它的多数应用场景
这里是我们ADAS的Processor
它主要是应用于我们的 基于上头的一个ADAS应用
比如说我们单目或者双目的前视
倒车后视 然后还有我们2D或3D的环视
然后还有夜视的一些系统
那这里面会有我们的一个 Infotainment Processor
它可以提供的一些是用于中控
然后有仪表盘 还有Telematics的一些性能
接着我们会有一个... 这个里面可能要说明一下
就是说这个后续的这些可能是 我们汽车处理器家族里面的一员
但可能和我们的这个Jacinto系统 可能是有一些差异
这里头我简单就是说一下 这里有一个SimpleLink
低功耗蓝牙集成的一个MCU 可以用来去做一些近车检测
以及无钥进车
无钥是开车门的这些方案
然后C2000的MCU主要是运用于 我们现在比较火的一个...
电动车的车载的充电、DC/DC转换
然后还有牵引力控制的这些功能
最主要它是我们这个C2000 因为它性能比较强大
所以它就是说能够提高这个 可以帮助车场去在单车上提高这个
续航能力以及减少它的充电次数 可以提高车辆的使用寿命
那最后一个是我们单芯片的 毫米波雷达的一个Sensor
这里面的单芯片是指 我们只需要增加一个外部的天线
就可以完成整个的雷达功能
这主要是使用在我们的车内 或者车外的人员和障碍物的检测
或者是我们车内的生命体征检测
主要可用于DMSL 这样的一个驾驶员检测系统
这里就简单的介绍了一下
就是说这个Processor它是可以...
因为刚才所说的它只需要接到 外界天线它就可以做到完整的场景
所以它是可以做到 非常、非常小的一个尺寸
这里面其实我还要特别说明一点
我们这里面的话 因为我们是一个家族
对于Jacinto来说是一个家族
所以这里面我也强调一点的是 我们是可扩展的硬件
我们后续会说明一下 我们是怎样实现这个比较大范围
或者是说比较宽范围的 一个可扩展的能力
另外我们会有自己的一个 叫的[听不清]SDK
这样的话可以帮助大家缩短研发周期
这里我要给出Jacinto的汽车处理器
它的三条产品线当中
它的应用场景和一些特点
那我现在要说明的是 我们这边左边的这个
大家可以在我们TI的官网上可以看到
TDA开头的这一系列
这一系列主要是应用于ADAS的应用
左边的这一类
其实我觉得在我们现在的 L1、L2的这类智能驾驶应用
和大部分的应用都可能用上
比如说我们这里的叫DMS Driver Monitor System
还有Surround View 2D或3D的 这已经是比较普遍了
中国的车都会有这样的配置
这里还有一个我们的毫米波雷达 和激光雷达的一些方案
然后有我们低功耗的 一个前视摄像、前视系统
然后还有多数据来源的数据融合
这里面另外一个就是我们叫 智能的[听不清]后视镜
的一些应用
右边是我们DRA前缀的一个产品线
这块产品线主要是 应用于Infotainment系统
和一些Cluster应用
比如说我们现在的Center Stack 这样的一个中控
和Cluster以及 中控和Cluster组合的CockPit
这样的智能驾驶舱的一些应用
这里面还要有一个说明
就是这是一个后座娱乐系统
叫Rear Seat的后座娱乐系统
Silverbox类似于T-Box的功能
然后这里面还有就是我们所讲的
除了ADAS、Infotainment之外的 第三条产品线
就是我們的Gateway這块
以及V2X/V2V
好我现在要简单说明一下 刚才我们为什么提到硬件上的
可扩展性
对于我们整的Jacinto扩展器来说
它的主要特点是多核易Go系统
多核指的是 我们有多颗MCU、多颗GPU
然后DSP,还有我们的辅助的MPU
AMPU,还有加速器
易Go就是我们可以在 每一处的MPU或者
AMPU类似于比如说M4上面 我们可以跑单独的一个系统
这里我们可以简单的说明一下
这里是说我们会有多核
单核或多核的MPU可以去提高这个...
Scalability就是可扩展性
然后还有它的变换能力
另外一个就是说我们可以单独 刚才我们也提到了就是我们可以
把分别的就是MPU当中 比如说某个单颗MPU或者一处的MPU
用来去支持多操作系统或者
多Domain的软体架构
这里面再要说明一下 因为我们大部分市场上的一些
车载的Processor
可能配置上 相较于我们这边有一些差异
我们主要的特点是可以把在MPU
或者GPU上的一些Workloading
可以通过算法移植去Upload到DSP
和我们比如揭露上的[听不清] 和我们机器上的我们新一代
[听不清]叫做[听不清]等加速器上
这里就是我们提到的我们可以去做到
主CPU、主处理器 主核上的一些Workloading
可以分散到其他的核上
以降低整体的功耗
和提高软件的...
降低软件的复杂度
好这里面还有一个是我们要 特别提到我们这里面有一个叫
辅助的一个MPU
我们内部叫M4
揭露上会叫M4,机器上会有一个R5F
它是可以用来做一些实时的处理
包括像Auto-stop的一些应用可以 去满足我们现在现有的一些
现有的就是 车厂对产品的Safety的要求
好这里面就是说一下
我们第三就是刚才提到的 在Jacinto家族里面会
有第三条产品线就是 做网络Gateway的功能
在右边这张图就是给出了 我们现有的一些...
就是车辆上面使用的一些网路架构
左边这里是一个Telematics的 一个控制单元
然后在我们的右下方
会有Powertrain Domain
还有底盘的控制 然后还有智能驾驶舱
ADAS以及Body Electronics Domain
而这里要提到一条现有的 因为它的数据就每个Domain之间
数据交互以及数据处理的 需求量比较不是非常大
所以大家在现有的这个框架里面
这些Domain之间的交互 可能只是用CAN或是LIN去来做
那么在可以预见的是
我们智能驾驶这个应用场景 会越来越多的时候
那么对于这个大数据量 这个Domain之间大数据量的
数据传输来说就是需求量会增加
所以在这几个Domain之间
的传输数据量可能会由于 这些自动驾驶应用的加入
所以导致它会有大幅度的提高
那么这里对于我们的[听不清]来说
它就需要有更高的计算能力
和更强大的一些比如说对接于
[听不清]对接于[听不清]
这样的一些技术能力
好这里面是我们的 现在第三条产品线Gateway
这个产品线里面给出
已经有样片的一款Gateway处理器
你们可以在我们的TI.com官网上 直接搜索到
你可以用这个关键词 可以直接搜索到
我在这里面要插一句简单的
TI.com上这里面会有一些 我们这颗片子的一些参数
你可以看到它的一些配置参数
比如说有多少外设 然后Call有几个
类似于这样的
这里面会有我们所有的技术资料 包括这里面的data value
也会包括 它给出的一些Reference Design
还有我们的一些叫 Technical Reference Domain
就是说对我们里面每颗核 核里面的IP、外设的IP的一些
详细介绍
那在tools跟software这里面会提供的 是我们Reference的EVM的一些设计
和相关的一些SDK软件
这里都是免费的、Free的
在support&training里面你们可以 去找到一部分的就是视频资料
training的资料和文档
好我们这里面是接下来是我们
就这款Gateway处理器我们考虑的 一个Telematics系统
Telematics它其实 从字面意思上来讲就是
远程的数据处理、信息处理
那么这样的话就会很明显地看到
我们这里面的数据就包括了我车内的
和车外的信息处理
信息交换 那么这样的话最主要的是
我们4G和5G的技术 然后还有GPS
和BLE、WiFi、V2X
这些途径进来的从车外进来的数据
以及我们车内的数据
车内的数据现有的 大部分都是一个CAN还有一个LIN
但是在后续的就是刚刚所说的
比如说我们[听不清]驾驶的 这些场景下来
那么Ethernet要求的这个高数据量
高数据通同量的 这个需求可能会慢慢增大
那么这时候也是需要 我们在传统的车载网关
里面MCU的处理能力相对于较弱
所以在这个大数据量需求的场景下
那么这个Processor 就是一个必要的选项了
然后这里面我们给出了一个简要方案
在右下端的这张图里
框图里我们可以看到 实际上对于大部分的像GPS
V2X然后Audio 还有惯性的一些测量单元之类
我们都是由外部的一个Module来完成
那实际上对于我们考虑的Gateway
就是Telematics应用场景下的 一个Gateway处理器
能力那它是可以做到一些
比如说我们需要有一个HSM 去做信息的加紧密
去保证它的Security
然后我们会有一些加速器
ECDSA比如说 椭圆曲线的一个DSA算法
一个加速器来加速 这个信息加紧密的运算
然后我们在里面 会有一个Ethernet Part
或者是说包括 有一个Ethernet的Switch的能力
一个IP在里面
去满足我们后续对Ethernet这种
高通同量的数据端口的需求
这里面还有一个我们会自己 在[听不清]有一个单独的MCU Domain
来做一些CAN和LIN的数据转发
稍微要提一点我们这里面的MCU
的Domain和我们这一整块的 叫Main Domain之间
是彻底分离的
包括电源、包括时钟
也就是说我们在MCU 可以这么理解就是在Main Domain
这些功能都在...
工作的情况下可以保证我们MCU 是可以一直在工作
好这里是我们的 你们可以在TI.com上找到的那颗
刚才我们提到的Gateway Processor
一些配置参数
刚才也提到了我们这颗里面 会有一个MCU的Iceland
它其实是与我们左边这一侧的 Main Domain之间是
可以理解成是一个物理隔离
在其中它会有一个的[听不清]两核
或者是四核的一个R5F的...
一个... 一个...
一个小的处理器单元
MCU的单元
会有两级的比如说在我们TI804
它是
然后另外一个就是在我们右端的 这个Main Domain里面
它会有一个A53的这样一个配置差异
DRA804M会有两组
共四颗A53的核
然后在DRA802M 会提供的是一组两核
两颗A53的核 这样的话就可以去
就是在MPU的这端处理能力上
可以做出一些区分
然后大家都可以看到我们在MCU這端
它是有一个512K内部的Memory
这样的话有助于我们系统的快速启动
对于ECC来说我们在所有 Critical的Memory上都会有支持
这样的话就可以满足 我们后续对Safety的要求
我们在这颗芯片上 现在是支持LPDDR4
然后通同率是1600
这里我还要提到一点 我们的这一颗就是
这一颗就是网关产品线里面 它的主要一个
比较重要一个特性叫
Multicore Navigator TeraNet
这个总线你可以看到它
实际上是架设在MCU和MPU
和Main Domain之间
然后还有和其他的外设之间的 一个数据总线
那么它是可以提供软件去解析 这个总线上传输数据的包头
然后通过指针方式去交换数据
也极大的提高了这个总线的通同量
好Security这块就是必要的 比如说我们Secure Boot还有
还有一些加减密的运算 然后还有TrsutZone
这是现在比较常用的 在Processor的方式
Processor里面去实现安全的方式
Ethernet是我们刚才提到的 在我们的Gateway里面是一个就是
为了我们后续的网关升级
所增加的一个Feature
可以看到我们这里面是有 最大是有到6颗的
Data Bit Ethernet Ports
可以 数据通同量非常大
另外在MCU的Domain里面 我们会有一个单独的一颗
1G Data Bit Ethernet Ports 这样的话可以在一些MCU
仅仅MCU的工作场景下也可以 去支持到网络应用网络的一些功能
另外我们下面是一些比较...
常见的一些Connectivity的功能
比如说有PCIe、USB还有CAN FD
还有MMC的功能可以支持到UHS-I的
还有Octal-SPI 这里面可以支持SIP的一些
所以说在这里面...
我们会有一些 比较可以去支持快速启动的
一些硬件上的特性
好接下来就是我们刚才所说的 我们是想要给出一些就是
基于我们这颗网关Gateway的
Processor的一个Demo
大家都知道这其实是一个 开放式的SOC的一个应用
它主要是说我从外部传进来的数据包
网路数据包经过 我们的MCU Domain里的R5F
的上面这个协议站的处理 处理完需要去解密
解密完处理完再加密
然后再把它数据再传出
这个端口
你可以看到我们在右边看到
实际上在这里可以看到 我们R5F的Workloading
Workloading大概是在30%左右
而这一颗Ethernet Port的数据通同量
是接近1个GB
所以说一方面来说我们实际上 对于我们Ethernet Port
它的数据通同量能够达到飙升
另外一个在我们MCU Domain里面
是可以处理很多Workload 或者说[听不清]来做其他应用
甚至来说我们在这种应用情景下 A53是完全空出来的
所以我们认为说在这个 Gateway Processor来说
我们或许可以在Gateway
这个功能上我们可以增加 更多的一些新的Feature
它因为有足够的一些计算资源在那
好这里是我们刚才所说的
一些点
其实刚才已经说了就是
这个点在你们当中其实是加了 Crypto Accelerator
这样的一个处理
OK
这里面是这样子的就是
因为我们Gateway这样的应用来说
它对这个Security和Safety应用来说 要求比较高
那么我们常用的比如说
Autosar的[听不清]来说
是用来做一些Safety相关的一些应用
然后又因为是传统网关上 它的数据处理量会比较少一点
那么...
传统的Autosar它是可以满足 这样的一些处理能力
但是在后续的如果说比如说自动驾驶
如果说[听不清]处理的更多了
那么这样的话就是说 在Gateway上来说它
可能就会有一些大个数据量处理
比如说我们刚刚所说的一个图像交互
另外一个还有车内的...
各个控制单元的OTA的升级
那么这样就会有大量的数据交互
这个时候就说我们业内是有 一个在Classic Autosar
这块是和它有一个对等的 Adaptive Autosar
这样的一个实现
那它们的差异主要是在于
我们Adaptive Autosar 是为了提高它的计算能力
提高它的数据处理能力
那么是建立于我们所讲的叫 High Level的OS
也比如说是[听不清] 比如说是QS
那么这样的话就可以提高我们
整车的整个设备的这些 Safety、Security的一些特性
跟一些特点
那你可以看到 大家可以看到这里面是说
我们这颗芯片 会有一个多核易购的系统
那么我们可以在MCU Domain上
可以去支持这个Classic Autosar
然后在我们的Main Domain的 Cortext A53上面
可以去支持我们的Adaptive Autosar
那么另外一个就是我们刚才提到的 我们TI内会有一个TRX
这样一个高速的数据总线
然后和建立在这之上的IPC的
Fundamental的一个软件基础
我们可以实现到Adaptive Autosar
和Classic Autosar之间的一个通信
然后这里面最重要的一点 就是之前刚刚提到的
我们的MCU Island 可以作为一个Safety Controller
也就是说即使在这一端
Main Domain这一端
如果系统Crash了
那么它并不会引起我们这个
MCU这端任何的异常
好
最后要强调一点就是说 我们自己这一款的产品线其实
在除了我刚才列出来的 DRA804M和802M
我们后续会有更加丰富的一些
网关处理器的一些芯片
那么也就是说我们可以去
现有的应用和未来的一些 更加复杂的一些应用
那同时我们会提供相关的SDK
那我们的SDK可以做到 不同配置的处理器上
都可以同时应用
和减少这样软件的一些研发工作
好
那基本上我们的 主要内容都已经讲完了
希望大家多多关注 我们的一些活动
谢谢
谢谢大家
手机看
扫码用手机观看
 视频简介
视频简介
1.4汽车设计的嵌入式创新
所属课程:2019TI汽车电子月视频回看
发布时间:2019.05.15
视频集数:20
本节视频时长:00:27:46
本课程主要介绍 T-Box 的背景和应用情景,以及 T-box 的系统和方案。





 未学习 1.1P-EV的框图
未学习 1.1P-EV的框图
 未学习 1.2PSR反激电路设计考虑因素
未学习 1.2PSR反激电路设计考虑因素
 未学习 1.3EV / HEV汽车-48V系统
未学习 1.3EV / HEV汽车-48V系统
 未学习 1.4LM5170平均电流模式
未学习 1.4LM5170平均电流模式
 未学习 1.1 边缘背光照明
未学习 1.1 边缘背光照明
 未学习 1.2 直接点亮背光
未学习 1.2 直接点亮背光
 未学习 1.1汽车车身电机解决方案
未学习 1.1汽车车身电机解决方案
 未学习 1.2TI汽车车身电机解决方案(外部MOSFET)
未学习 1.2TI汽车车身电机解决方案(外部MOSFET)
 未学习 1.3TI汽车车身电机驱动器(集成FET)
未学习 1.3TI汽车车身电机驱动器(集成FET)
 未学习 1.4汽车多通道半桥(DRV89XX-Q1)
未学习 1.4汽车多通道半桥(DRV89XX-Q1)
 未学习 1.1T-BOX --- TI解决方案
未学习 1.1T-BOX --- TI解决方案
 未学习 1.2TI关键TBOX参考设计
未学习 1.2TI关键TBOX参考设计
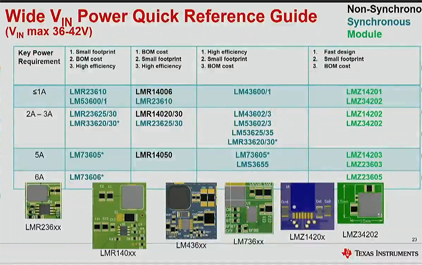 未学习 1.3宽输入电源快速参考指南
未学习 1.3宽输入电源快速参考指南
 未学习 1.4汽车设计的嵌入式创新
未学习 1.4汽车设计的嵌入式创新
 未学习 1. 1TI MMWave汽车传感器解决方案
未学习 1. 1TI MMWave汽车传感器解决方案
 未学习 1.2使用高性能前端的成像雷达
未学习 1.2使用高性能前端的成像雷达
 未学习 1.1外部放大器的系统解决方案
未学习 1.1外部放大器的系统解决方案
 未学习 1.2电源树解决方案
未学习 1.2电源树解决方案
 未学习 1.3 ADC / AC和编解码器
未学习 1.3 ADC / AC和编解码器
 未学习 1.4功率放大器
未学习 1.4功率放大器




















