
蓝牙产品
最新课程
- 如何利用高速比较器优化系统设计
- TPS546D24S 和 TPSM8S6C24 中的扩展安全功能
- TI 高精度实验室 - 仪表放大器
- 高侧开关深入研讨
- TI 高精度实验室 - 微控制器 (MCU)
- TI 高精度实验室 - CPU内核
- 三种直流/直流控制模式的实际比较
- 电源多路复用器深度培训
- TI Edge AI Studio:用于边缘 AI 设计的免费软件开发工具
- Edge AI Studio 概述
热门课程
TI-RSLK 模块 19 - 实验视频 19.2 - 与机器人通信
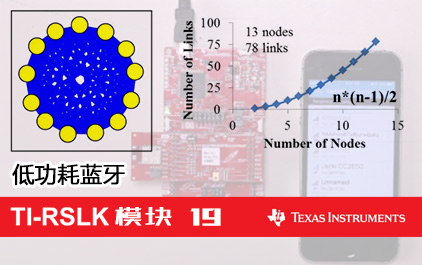

本实验的目的是提供与机器人之间的
低功耗蓝牙通信。
对于本实验的该部分,您需要
CC2650
或
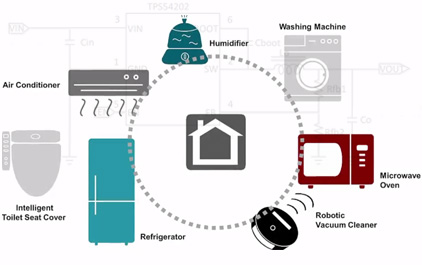
该部分的目标是向您展示智能
对象与移动设备之间的
双向通信。
好的。
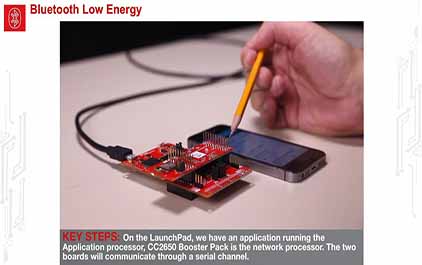
让我来展示一下实验环境。
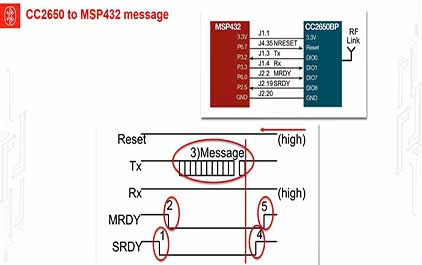
MSP432
现在,CC2650
称为网络处理器的软件层,用于处理
所有底层蓝牙命令。
然后在
处理器的层。
此外,在它上面,我们有机器人系统,
它执行我们马上会看到的
各种任务。
好的。
让我来向您演示相关步骤。
现在,我们记得第一步在
它将设置允许进行通信的
一项特性或若干特性,
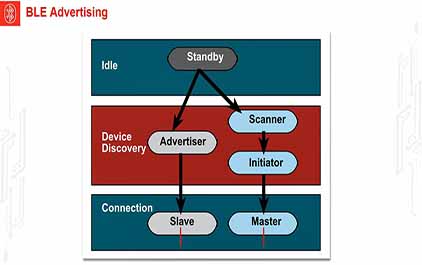
然后它将设置广播,以便智能
对象具有用于通信的名称和方法。
现在,在移动设备这边,
下一步将是与该设备进行连接、
通信或配对。
那么我将单击那里的机器人。
现在您将看到我已经在实验
解决方案中设置的特性。
现在呈现了若干特性。
我可以读取传感器,我可以
向电机中写入,但有趣的是命令。
因此我将通过移动设备设置“Control
现在它变为这里的第二条命令,
我将向第二条特性命令进行
写入,这将是后退。
现在第三条命令是转弯。
那么,让我们看看当我们按下第三条命令时会发生什么情况。
您可以看到它会转弯。
好的。
我们试试另一条命令。
第四条命令。
我们将往回走。
那么,再说一次,我演示了与我的机器人
进行通信的功能。
现在,让我向您展示我最喜欢的命令。
这是第五条命令。
很久以前在模块
有限状态机。
实际上,我要在机器人上
运行实验
作为第五条命令,它将是一个循线机器人。
现在,它不是一个很好的循线机器人,
但您可以看到该机器人正在
与底部的线传感器进行
通信,希望跟踪底部的线条。
在本实验中,您了解了如何向机器人
添加蓝牙通信。
能够实时与机器人进行远程交互
可为您的系统开辟新局面。
-
 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 无线
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 无线
-
 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 理论
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 理论
-
 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 简单网络处理器
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 简单网络处理器
-
 未学习 TI-RSLK 模块 19 - 实验视频 19.1 - 演示 BLE
未学习 TI-RSLK 模块 19 - 实验视频 19.1 - 演示 BLE
-
 未学习 TI-RSLK 模块 19 - 实验视频 19.2 - 与机器人通信
未学习 TI-RSLK 模块 19 - 实验视频 19.2 - 与机器人通信





