
高速模数转换器 (>10MSPS)
最新课程
- TI 高精度实验室 - CPU内核
- 三种直流/直流控制模式的实际比较
- 电源多路复用器深度培训
- TI Edge AI Studio:用于边缘 AI 设计的免费软件开发工具
- Edge AI Studio 概述
- AM62A EVM 入门
- MSP430 微控制器 - 产品组合概述
- 使用 TI Wi-Fi6 简化物联网
- Wi-Fi 6 简介
- 连接:适用于高性能 MCU 的 Wi-Fi
热门课程
TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量
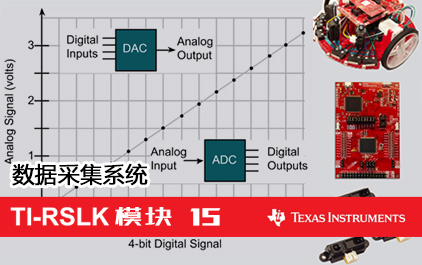


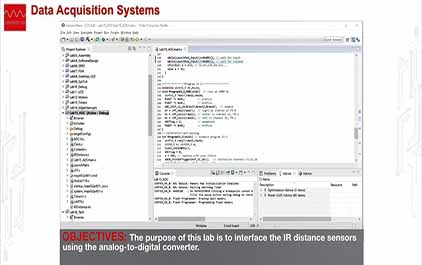
本实验的目的是使用模数转换器
连接红外距离传感器。
在本实验中,您将需要
和
本部分的目标是使用传感器
测量距离。
这是机器人。
您将看到它有三个红外距离传感器。
它们的任务是测量
机器人到墙壁
这一侧、中间和另一侧的距离。
好了,让我来向您展示该软件。
后台运行的是此中断服务例程,
运行速率是每秒钟
它的工作是使用模数转换器
将原始电压转换为数字样本。
然后它将执行数字滤波器,
以提高信噪比。
其中一个基本的工程取舍是
该数字滤波器的滤波器长度。
滤波器越长,噪音越低。
但另一方面,滤波器越长,
就会造成响应延迟。
因此这是您必须解决的一个取舍条件。
软件的下一步操作是将滤波器的输出
转换成距离。
好了,让我来向您展示该运行过程。
我要转到
流式传输出来。
好了,看这里的
我们看到了距离三个传感器的距离。
现在的情况是,机器人处于
道路中间的这个理想位置。
所以这个传感器与那个传感器之间的
距离大致相等。
另一方面,如果我刚好距离这面墙较近,
您看,这个距离将较小,
那个距离较大。
因此我们可以看到,根据您在路线上的位置,
这两侧的传感器给您的相对距离有差异。
我们继续前进,看看会发生什么。
如果我们继续前进,
您会注意到这一侧的传感器
看不到墙壁了。
它径直固定在了
也就是说,那一侧不再有墙。
所以我们现在要提出这个问题,我应该怎么做?
嗯,我认为您应该转弯。
在本实验中,我们学习了奈奎斯特定理、
中央极限定理和使用数字滤波
提高信噪比。
我们还看到了如何使用软件
对此非线性传感器进行校准。
在必须避开墙壁才能达到目标的机器人挑战中,
红外距离传感器是解决这些挑战的
一个重要组件。
祝您愉快。
-
 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
-
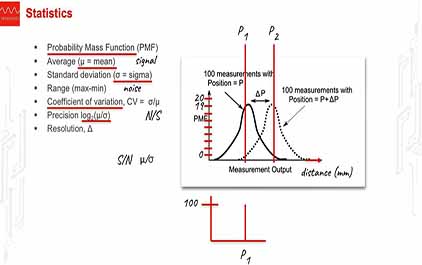 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
-
 未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量
未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量



