
实时时钟 (RTC) 和计时器
最新课程
- 如何利用高速比较器优化系统设计
- TPS546D24S 和 TPSM8S6C24 中的扩展安全功能
- TI 高精度实验室 - 仪表放大器
- 高侧开关深入研讨
- TI 高精度实验室 - 微控制器 (MCU)
- TI 高精度实验室 - CPU内核
- 三种直流/直流控制模式的实际比较
- 电源多路复用器深度培训
- TI Edge AI Studio:用于边缘 AI 设计的免费软件开发工具
- Edge AI Studio 概述
热门课程
TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 理论



大家好,我是
在前一个视频中,
在前一个视频中,
在本视频中,我将向您展示如何实现它。
此外,我将向您展示
如何证明它确实正常运行了。
我们要在实验中解决的问题是,
如果机器人撞到墙,
我想让电机停止,我要做的是
在边沿触发中断中设置它,
从而在发生碰撞事件时,
它将根据硬件电路的实现方式,
在一个
在一个
我要做的是,设置好
这个
这样,我们就可以实现很低的延迟
和很短的响应时间,从而使机器人碰撞和
变得很短、很有限。
在此期间,我们将再次讨论中断
和嵌套向量中断控制器。
我们将讨论优先级,
然后引导您完成一些必需的步骤,
以便您在您的工具库中加入边沿触发中断
这个新工具。
好,让我们开始吧。
请注意,我们以前已经看到过这个,
这是我们的中断向量表。
这基本上为我们提供了我们可以
在
我们之前已经看到过
这是我们第一次接触中断。
之后,我们看到过周期性定时器,
有四个周期性定时器,
它们都可以产生中断。
现在,我将介绍另外
分别是端口
分别是
经过设置都可以触发中断。
您应该注意到,它没有
7、8、9
我们必须将碰撞开关
接到这六个端口之一。
接到这六个端口之一。
这张表中还有其他什么内容呢?
还有中断序号,
每个中断有一个中断向量。
例如我将使用端口
所以它将是中断
它有这个特定的中断向量名,
叫做
用于设置端口
在这里,在嵌套向量中断控制器
在这里,在嵌套向量中断控制器
优先级寄存器
让我们继续。
这是对以前所学知识的回顾,
我们以前已经看到过中断,
我们知道,有四件事情是
要产生中断时必须发生的。
在本例中
我将按照相反的顺序来执行它们
我们有硬件触发信号,
它是触发中断所必需的信号,
在本例中,它将是上升沿或下降沿,
嗯,它将是
这将是我们的触发信号,
中断标志寄存器的第
这就是硬件触发信号。
接下来,在软件上有三个地方需要进行初始化,
接下来,在软件上有三个地方需要进行初始化,
我们有中断使能位(ARM),
端口
我们只需设置
以便它发出一个中断请求。
然后,我们将通知嵌套向量中断控制器
我想要使用这个中断,
具体来说,我要启用第
具体来说,我要启用第
请注意,对于
但对于定时器,我们需要执行该步骤。
最后,所有中断在
一个统一的使能位,
primask
这全部四个事件,如果它们同时为真,
那么将产生一个中断请求。
现在,如果这个中断是优先级
那么如果有一个优先级
那么新的中断会被延迟,但假如
没有其他中断正在运行,
它将执行完当前指令,令八个寄存器入栈,
从低位
具体到
这将为我们设置该向量。
接下来会自动发生的是,
在处理器中的某个位置,
嘿,我要运行
连接寄存器具有一个特殊代码,
然后,嘣,我们开始运行中断了。
好了,我们现在正在运行与该触发信号
好了,我们现在正在运行与该触发信号
我们将执行一个称为确认的步骤,
它将清除该同一个标志位,
IFG
我们将执行该服务。
现在,在本例中,
我将使计数器递增,
但在实验中,我们将停止电机,
因为您刚刚撞上了墙。
然后,当它执行该
并且
它将从堆栈中重新弹出所有这些寄存器,
包括程序计数器,
这将使您返回到中断发生时您所处的位置。
这就是通常中断发生时,
包括边沿触发中断发生时,
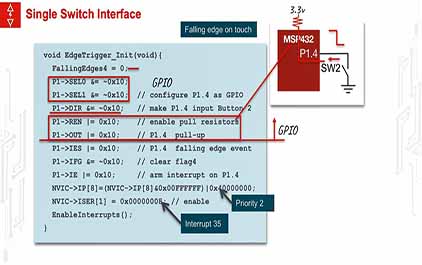
那么,这里是初始化,
对于负逻辑接触开关,
对于负逻辑接触开关,
因此开关接通时会产生下降沿。
正如我说过的,中断服务中所执行的实际代码是
使计数器递增。
这碰巧是一个常规
因此我们将清除引脚功能复用,
因此我们将清除引脚功能复用,
这是第
这是端口
这是端口
这是一个输入引脚,因此要清除方向寄存器。
这两个位,正如我们在前一个视频中看到的,
将设置内部上拉,
这样,如果开关未被按下,将是高电平。
这条线之上的所有内容是我们
已经针对
这是对我们这个学期多次学习内容的
一个回顾。
接下来的是新内容,
是关于中断的。
您需要区分上升沿和下降沿,
这是
我要将第
在这里,该寄存器中的
您应该能想到
上升沿,如果您需要上升沿的话。
接下来,我要清除中断标志位,
以确保第一个中断在边沿之后
以确保第一个中断在边沿之后
处理器在上电时执行了意想之外的操作。
因此我将清除该中断标志位,
以及我的所有初始化项,
这是作为一项预防措施,
在我完成所有初始化之后再发生。
因此,这是一个可选的步骤。
下面这个步骤不是可选的。
我们必须对中断进行使能,
使能端口
将它置为
很显然,0
因此,我可以设置端口
清除这些位,从而不让它们的中断被引发。
我们讨论过优先级设置,
它位于第
这将把端口
这将把端口
这样它将打断优先级
但如果在中断触发时碰巧有优先级0、1
但如果在中断触发时碰巧有优先级0、1
下一步是在嵌套向量中断控制器中启用这个中断,
如果我们用
这是因为其中的每个寄存器只有
我可以看到中断
该寄存器的第
下面这部分听起来有点奇怪,
请不要怪我,我只是个送信的,
我没有编造这段内容。
这个部分有点奇怪,
它是由
具有一个特殊之处。
如果您向这个寄存器写入
但如果您向这个寄存器写入
并不会禁用该中断,
将不会发生任何事情。
有另外一个叫
您可以向它写入
但这实际上是个友好的操作,
尽管代码上看起来我要清除其他
但实际上不会,因为这是一个特殊的寄存器。
现在,很显然,我们必须启用全局中断,
我们应在所有初始化完成之后执行该操作。
上面这些初始化将执行一次,
上面这些初始化将执行一次,
现在,当我按下按键时会发生的是,
我将得到一个中断。
产生中断的四件事情刚刚发生,
因此,如果您查看
会看到按键按下的动作导致了一个下降沿,
我们将这个动作称为触发信号,
或是需要做出响应的事件。
如果使用双通道示波器
或双通道逻辑分析仪,
可以测量到从触发信号发生
到中断服务函数运行之间的时间间隔。
这个时间会很短,
如果没有优先级为
但是,如果有上述优先级的中断在运行,
该时间将会延长,
这就是所谓的延迟。
延迟是触发信号和中断服务函数
延迟是触发信号和中断服务函数
而响应时间
则是触发信号到中断服务函数运行结束之间的时间,
则是触发信号到中断服务函数运行结束之间的时间,
这段时间称为响应时间。
这里的重点是,我可以使用双通道
示波器来测量中断请求和
中断服务开始之间的时间,称为延迟时间,
或测量请求和中断服务结束之间的时间,
称为响应时间。
这里调试时所用到的三次电平切换
也可以从更大的时间范围来看。
在这里,我缩小了时间轴,
因此,现在其中的每个按键按下的动作
因为三次切换之间的时间非常短
看起来都将是一个边沿。
正如我提到过的,Systick
中断服务例程都必须具有一个
步骤称为确认,即清除发生请求的中断标志位。
步骤称为确认,即清除发生请求的中断标志位。
上述是一个碰撞开关时的情况。
如果您有多个开关怎么办?
我将通过三种方法来处理它,
这是最简单的一种。
那么,如果我有多个
需要在后台进行中断服务的开关,
我可以做的最简单的事情是,
使用我在模块
换句话说,用一个周期性中断,
让这个中断的周期快于我按下的速度,
让这个中断的周期快于开关被按下的频率,
具体来说,
我将每
在该
我将查看开关是否按下。
那么显然,如果这里的第
抱歉,这是第
那么,如果
这些是正逻辑开关,
因此这意味着开关
因此这意味着开关
另一个开关是
但这里的问题是延迟。
如果我看这个引脚,P6.2,
来看开关按下的时刻,当我按下开关,
它变成了高电平,
这个动作触发了延迟。
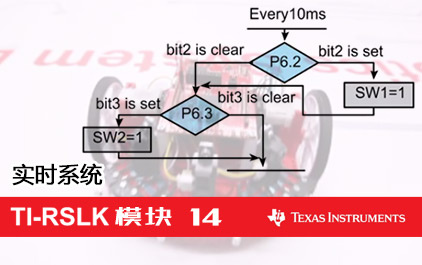
现在,我需要添加周期性测试。
那么,这是一个10
这是
这是下一个
未按下,未按下,现在
我看到按键被按下。
现在程序运行到这个位置。
可以看到,该延迟,
即开关被按下和软件识别
将在零和10
如果它们未同步,平均值将是
5
好了,这个方法可能不是足够好,但它就是这样,
它是一种非常简单的解决方案。
我使用一个周期性中断,
每个一个周期查看是否有事件发生。
每个一个周期查看是否有事件发生。
但是,如果我想让程序反应更快,
需要使用边沿触发中断。
第二种方法也不太难,
我将使用不同的端口。
请注意,我移动了我的开关,所以一个开关
位于端口
位于端口
那么,我要做的是,将我在第一个
一次针对端口
这里发生的是上升沿事件,
而不是刚才的下降沿。
我使用的是中断
因为端口
端口
顺便补充一句,
那么端口
现在,我将使能这两个中断,
并在嵌套向量中断控制器中启用这两者。
并在嵌套向量中断控制器中启用这两者。
再重复一次,这里的操作是一个友好的操作,
因为它不会撤消另一个操作。
现在,我有两个不同的中断向量,
每个中断向量用于一个开关。
我的中断向量很简单。
如果开关
将进入端口
并编写中断服务程序。
如果开关
将进入端口
由于它们具有相同的优先级,
因此它们不会相互影响。
换句话说,它们不会
不会相互打断,
如果一个中断正在进行,那么另一个将延迟,
被延迟的中断将被触发,它不会被忽略,
也不会丢失,
只是会延迟。
因此,这是一个非常简单的解决方案,
仅使用端口
请注意,这种方法可能比较便利,也可能不便利。
下面我们来看轮询解决方案,
刚刚是中断向量解决方案。
这是轮询解决方案,我回看原始硬件设计,
看到有多个开关位于同一个端口上。
因此我将两个引脚都设置为上升沿中断,
引脚
引脚
我将两个引脚都设为输入,
让它们都作为
我还需要使能这两者中断。
现在,它们都将通过中断向量
但问题是,它们将引发相同的
那么,如果它们碰巧同时发生,
我将只进入一个中断,我必须处理好这个问题。
有几种方法来处理这种情况,
最简单的方法是,使用一个特殊寄存器,
它的名字叫做
那么,如果同一个端口的多个引脚
都有可能引发中断,我要做的是,
读取该
此端口中的最低位编号。
接下来会发生的是,它将为您提供
它不会告诉您有两个中断,
它只告诉您有一个中断。
那么,具体来说,如果它碰巧是
对于
您会看到寄存器读取结果将会是
如果中断在第
您将在寄存器中读到
如果是第
将得到
第
第
第
第
如果您读到
但是,如果您有多个中断,多个边沿,
您将获得具有最低引脚编号的那个。
但它不会
您会注意到,它不会清除其他中断,
因此,如果两个中断碰巧同时发生,
您将读到第一个中断,
并识别开关
之后,您可以再次读取状态,
然后它将
因为之前的中断服务已经完成。
因此,读取
提供这些中断之一,
并且将自动清除另一个。
那么,通过这个方法,您将能够
同时使用这些中断,
同时使用这些中断,
响应其中一个或者两者同时响应,
并且不会因为任何关键部分或任何意外事件
并且不会因为任何关键部分或任何意外事件
这种方法更复杂一点,
如果您有六个中断同时发生,
您必须逐个检查该列表中的项目,
然后使用
这就是德州仪器
处理同一个端口上的多个边沿触发中断。
处理同一个端口上的多个边沿触发中断。
总结一下,我们讨论了边沿触发中断,
在对应实验中,我们将讨论碰撞事件,
该事件会使用同一个端口下的多个引脚,
您将学习使用
来分辨是哪一个引脚发生了中断。
然后,您将使用示波器
来看看需要多长时间来识别碰撞事件
并让电机停止转动。
这将是一个有趣的实验,
希望您喜欢它。
本章有许多基础知识是关于
中断、优先级、中断使能,
以及示波器和逻辑分析仪的,
-
 未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 理论
未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 理论
-
 未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 边沿触发中断
未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 边沿触发中断
-
 未学习 TI-RSLK 模块 14 - 实验视频 14.1 - 使用边沿触发中断为碰撞开关提供实时响应
未学习 TI-RSLK 模块 14 - 实验视频 14.1 - 使用边沿触发中断为碰撞开关提供实时响应



