TI工业马达的应用和设计-中篇
Loading the player...
将在30s后自动为您播放下一课程
另外一个是做 当你在做 (听不清)的设计的时候 你会发现 你的DV处理DT的时候 就是你的电流的损耗是怎么样去减少 那一般来说 (听不清)我ARM 然后我拉回来 你的所有的输出跟你的(听不清)enable的 switch的速度和频率有关 那么基本上 你可以看一下我们的这个框图 也就是说你的保护电路 你的这个(听不清)的 叫什么 和你的(听不清)本身的特性相关 也就是说 当我能够 在你的温漂和你的 控制电压 输入电压相同的时候 我的(听不清)的每一个控制的部分 都要去做一些调整 所以这个是 当你会跟到 跟到你的(听不清) 你的短路保护 的一个系统上面去 你所有的保护电路你都要重新考虑 那我们实际上在内部 现在所有的 (听不清)也好 我们集中(听不清)的整个solution来讲 我们会把保护电路全部做到内部去 包括像过流 开路 断路 低压 欠压 高压 过压 然后过流 过温 全都集成起来 以前的话 你可以要在外面加 什么相电阻啊 温度生成啊 current生成啊 包括一些 根据(听不清)要做一些电压的计算啊 这个其实 你在整个设计上面 我们会很简化地去做(听不清)的一些保护 那实际上 其实 这个就是很简单了 这个就是讲说 我们在调整(听不清)开关的时候 一定会有 一个东西 就是你的开关频率的 调整率 那这个就是一个很简化的图 就是每个不同的电流在关开 关关 然后再关关 之后再导通 有一个过程 internal的(听不清)内部和外部 (听不清)的流向的一个过程 那实际上 这样讲 如果你调整你的(听不清)driver的话 我可能通过调整外部设计的一些 电阻 或者一些电容的设置 我来调整我的开关频率 通过 (听不清)的逻辑 我去控制后面的(听不清)的开关 那其实实际上 是这样的 如果你 根据原来早的 最早设计的这种 (听不清) 你需要很小心的去匹配 这个部分的这个逻辑 因为很简单 你的(听不清)的(听不清) 跟你的(听不清)的控制是不匹配的话 那就会出现一个问题 你的(听不清)会打火花或冒烟 直接短路掉或击穿掉 就是这样简单的一个想法 就是很多人在设计马达的过程中就会发现 如果你的(听不清)的逻辑 不太完整的话 有一些小瑕疵的话 当你在用到一些极限 比如说 我开机我就可以做到9000转 马达我希望直接转到9000转 可能在开机加过压的瞬间 你的逻辑上有问题的话 你的(听不清) 到这边就会同时打开了 直接马达或(听不清)就烧掉了 所以这个在你设计过程中间 如果你做这种离散方案 或者你用这种飞机城律动绑定 或者这种费集成这种产品的话 你在设计你的开关的逻辑上面 一定要 很小心 就是很多人 拿过来接上后 就乱加一个逻辑 马达 转了 可以用了 但你换一个piece的马达 就会发现为什么这个(听不清)的这么高 甚至可能到10% 原因在哪里 就在这个逻辑上面 你的逻辑的匹配和你后面的(听不清) 和你的马达不兼容 这也就说 很多做马达的企业 我换一个批次 可能是同一个厂家 电机 因为电机是持续运行电源 它是没办法做到一致性的 它是有误差的 它的误差冗余度是多少 这个就完全取决你的客户生产的那个 那天生产的环境以及在仓储的过程中 里面性 所以这个(听不清)很大 这个是没办法被人控制的 就是我们有一个客户以前经常问我一个问题就是 他做了一个蛮好的系统 其实我觉得 他的系统蛮稳定的 而且他也调了逻辑开关 还有十分钟啊 他调了逻辑开关 然后呢 他对马达挑的很仔细 供货选了三家的(听不清)来供货 其实指标都是一样的 从(听不清)性能上 都一样 但放上去 有两家是OK的 有一家 怎么换 就是总烧 就是有问题 就是你的逻辑的部分 不是特别的理想 所以基本上 如果你仔细看的话 我来跳一跳讲 所以基本上 这个就是一个很复杂的内部框图 我刚才拆开讲了 你可以看到 其实内部的话 是一个非常复杂的框图 三线连接控制 (听不清) 外置然后整个逻辑电路和 供电系统 然后还有你的保护电路 还有你的反馈电路 全部会集成到 (听不清)driver这部分去 所以基本上 你会发现一个问题是什么 就是这个图上看起来是很复杂的 实际上在你应用的时候 会非常简单 如果你用(听不清)去驱动 电压 因为我们发现一个情况是这样 就是很多客户在做设计 我举个例子 有人做直升飞机 在场我不知道有没人做 现在天上飞的电池遥控的直升飞机 它会根据不同的 因为我们有些构造上讲 会根据不同的负载 有些带相机 有些可能带其他的东西 它只需要换后面的(听不清)就可以了 它不希望去改整个系统设计 最开始的时候 它做得是 (听不清)器件一堆搭在一起 然后换(听不清) 每次换 每次调 然后换了(听不清)以后 换(听不清)简单一点 但后来跟我讲说 我希望把(听不清) 我希望(听不清)能把上面移出去 这样我可以做更高压 我做到几百伏 这样我的高压低流 我的电池寿命 也会上去 但实际上 你在 这种应用里面 其实也不一定 就是从刚开始我讲的 (听不清)配不同的(听不清) 我就可以满足不同的系统需求 但是它不是无限制的 我不是可以一直往上加往上加 所以肯定会有一个limit 所以在整个系统设计上面 尤其是在(听不清)或马达的设计上面 考量的东西很多 我们其实还有反馈啊 一些乱七八糟的东西 那个也很复杂 所以基本上 我们一个系列 就给大家 大概看一下 其实我们 (听不清)是有很多不同的系列的 从不同的电压到不同的(听不清) 然后控制不同的 比如说 (听不清)马达的 BODC的 BDC马达的 因为你每个马达的特性不一样 它的控制方式不一样 所以你 driver就不一样 那我们其实也有把(听不清)集成的 就是固定一些特殊应用的 比如玩具啊 它的(听不清)要求不大 那我可能就是(听不清) 内置 但是像 我刚才说的 工具 工具类的产品 它的电压变化和电流变化的 幅度是很大的 比如我做一个枪钻 和做一个电锯 你可能前端控制部分全都是一样的 但是你后端(听不清)输出的部分 可能是不一样的 所以它更多地会选用这种 没有集成(听不清)的产品 所以这个根据你设定的东西的不一样 所以它的需求和产品的定义 是不一样的 就给大家快快看一下 我们在driver上面 其实是有 很多产品 而且有很多设计理念 是考量了我们很多客户的需求以后 去做的一些产品 那实际上刚才讲的这种产品呢 回到最前面 我们刚才讲的产品实际上就是这地方 就是(听不清)这部分 那么我们没有把(听不清)和控制部分放在一起 那后面给大家介绍的东西呢 实际上是一个 另外一个理念 我们叫做集成 叫做集成的一个马达控制器 那它的 那一般来讲 大家看一下 就这个图 就是我刚才第一个图的简化 (听不清) 然后反馈 然后保护 FET 然后控制 控制就是你的主芯片 你的系统在这里 那实际上 在我们的理念里面 我们还有一种全集成 所谓全集成是什么呢 你在控制回路 你在控制主芯片的算法 其中一部分就是一个轮训的状态机 我把它拿出来 放到我的 我芯片里面去 放到我的(听不清)driver里面去 然后把后面的(听不清)也放到(听不清)driver里面去 我就会变成另外一台(听不清) 那它的好处是什么 它的好处是 对你很简化的一个系统上面 你可能就直接发一些命令给我 转速如何 怎么转 正转反转 什么时候停 什么时候开 然后转多少次以后 我停下来 就是这样的一个控制系统 那其实你没有必要花很多时间 去研究我要写多长时间的算法 我要做什么 哪些动作 我开机要转多少转 我关机要转多少转 停机的时候 我刹车要做几秒 你不用去考虑这些东西 我们有一个很简单的状态机 直接全部给你做好 所以这就是其中的一个理念 我们叫做DRV10 你在TI的网站上可以看到 刚才的那个 产品 之前的那个产品叫做DRV8 那这个把状态机放掉 叫DRV10 我们还有另外一个产品就是 放(听不清)在我的(听不清)里面 (听不清)放到外面去 那我们叫做DRV9 这个就更容易理解了 这个就是把这部分集成 那它的好处是什么呢 它的好处是 当你做 比如说 时针要求比较高的 我没办法放控制芯片加(听不清) 放在一起的 那 我可能希望就一颗芯片加 (听不清)就可以做控制了 那其实这个也是一个方向 那这种产品呢 我们现在比较 比较偏市场 我们现在主要是做一些 (听不清)集成器 就是你是一个很小的一个杆 细细的杆 前面一个头 集成 那一个大风扇 或者是做这种我刚才讲的 工具 比如枪钻啊 或者是这种动力钻啊 这种产品 我们可能更多的应用 这种产品 那 像在家电啊 像在水泵啊 这种上面 我们可能更多 其他一些理想的设计啊 包括像手机 像飞机 像其他的一些产品 可能更 更多地用这样的一个产品 像现在比较火的机器人 机器人手臂的关节 头部的转动 胸部的转动 腿的相对移动 包括 扫地机器人轮子的转动 还有它的那个板刷 就是扫地板刷的转动 可能是用上一个控制系统来控制 因为我一个系统里面有很多歌马达 我每个马达上面只要配上(听不清) 跟(听不清) 我整个控制系统 放到中间去 我中央的控制系统 有一个马达 但像这种单一的 控制的话 我们一般都是用集成的方案 所以这是给大家的一个概念 根据你的需要不同可能 你会有一些不同的选择
另外一个是做 当你在做 (听不清)的设计的时候 你会发现 你的DV处理DT的时候 就是你的电流的损耗是怎么样去减少 那一般来说 (听不清)我ARM 然后我拉回来 你的所有的输出跟你的(听不清)enable的 switch的速度和频率有关 那么基本上 你可以看一下我们的这个框图 也就是说你的保护电路 你的这个(听不清)的 叫什么 和你的(听不清)本身的特性相关 也就是说 当我能够 在你的温漂和你的 控制电压 输入电压相同的时候 我的(听不清)的每一个控制的部分 都要去做一些调整 所以这个是 当你会跟到 跟到你的(听不清) 你的短路保护 的一个系统上面去 你所有的保护电路你都要重新考虑 那我们实际上在内部 现在所有的 (听不清)也好 我们集中(听不清)的整个solution来讲 我们会把保护电路全部做到内部去 包括像过流 开路 断路 低压 欠压 高压 过压 然后过流 过温 全都集成起来 以前的话 你可以要在外面加 什么相电阻啊 温度生成啊 current生成啊 包括一些 根据(听不清)要做一些电压的计算啊 这个其实 你在整个设计上面 我们会很简化地去做(听不清)的一些保护 那实际上 其实 这个就是很简单了 这个就是讲说 我们在调整(听不清)开关的时候 一定会有 一个东西 就是你的开关频率的 调整率 那这个就是一个很简化的图 就是每个不同的电流在关开 关关 然后再关关 之后再导通 有一个过程 internal的(听不清)内部和外部 (听不清)的流向的一个过程 那实际上 这样讲 如果你调整你的(听不清)driver的话 我可能通过调整外部设计的一些 电阻 或者一些电容的设置 我来调整我的开关频率 通过 (听不清)的逻辑 我去控制后面的(听不清)的开关 那其实实际上 是这样的 如果你 根据原来早的 最早设计的这种 (听不清) 你需要很小心的去匹配 这个部分的这个逻辑 因为很简单 你的(听不清)的(听不清) 跟你的(听不清)的控制是不匹配的话 那就会出现一个问题 你的(听不清)会打火花或冒烟 直接短路掉或击穿掉 就是这样简单的一个想法 就是很多人在设计马达的过程中就会发现 如果你的(听不清)的逻辑 不太完整的话 有一些小瑕疵的话 当你在用到一些极限 比如说 我开机我就可以做到9000转 马达我希望直接转到9000转 可能在开机加过压的瞬间 你的逻辑上有问题的话 你的(听不清) 到这边就会同时打开了 直接马达或(听不清)就烧掉了 所以这个在你设计过程中间 如果你做这种离散方案 或者你用这种飞机城律动绑定 或者这种费集成这种产品的话 你在设计你的开关的逻辑上面 一定要 很小心 就是很多人 拿过来接上后 就乱加一个逻辑 马达 转了 可以用了 但你换一个piece的马达 就会发现为什么这个(听不清)的这么高 甚至可能到10% 原因在哪里 就在这个逻辑上面 你的逻辑的匹配和你后面的(听不清) 和你的马达不兼容 这也就说 很多做马达的企业 我换一个批次 可能是同一个厂家 电机 因为电机是持续运行电源 它是没办法做到一致性的 它是有误差的 它的误差冗余度是多少 这个就完全取决你的客户生产的那个 那天生产的环境以及在仓储的过程中 里面性 所以这个(听不清)很大 这个是没办法被人控制的 就是我们有一个客户以前经常问我一个问题就是 他做了一个蛮好的系统 其实我觉得 他的系统蛮稳定的 而且他也调了逻辑开关 还有十分钟啊 他调了逻辑开关 然后呢 他对马达挑的很仔细 供货选了三家的(听不清)来供货 其实指标都是一样的 从(听不清)性能上 都一样 但放上去 有两家是OK的 有一家 怎么换 就是总烧 就是有问题 就是你的逻辑的部分 不是特别的理想 所以基本上 如果你仔细看的话 我来跳一跳讲 所以基本上 这个就是一个很复杂的内部框图 我刚才拆开讲了 你可以看到 其实内部的话 是一个非常复杂的框图 三线连接控制 (听不清) 外置然后整个逻辑电路和 供电系统 然后还有你的保护电路 还有你的反馈电路 全部会集成到 (听不清)driver这部分去 所以基本上 你会发现一个问题是什么 就是这个图上看起来是很复杂的 实际上在你应用的时候 会非常简单 如果你用(听不清)去驱动 电压 因为我们发现一个情况是这样 就是很多客户在做设计 我举个例子 有人做直升飞机 在场我不知道有没人做 现在天上飞的电池遥控的直升飞机 它会根据不同的 因为我们有些构造上讲 会根据不同的负载 有些带相机 有些可能带其他的东西 它只需要换后面的(听不清)就可以了 它不希望去改整个系统设计 最开始的时候 它做得是 (听不清)器件一堆搭在一起 然后换(听不清) 每次换 每次调 然后换了(听不清)以后 换(听不清)简单一点 但后来跟我讲说 我希望把(听不清) 我希望(听不清)能把上面移出去 这样我可以做更高压 我做到几百伏 这样我的高压低流 我的电池寿命 也会上去 但实际上 你在 这种应用里面 其实也不一定 就是从刚开始我讲的 (听不清)配不同的(听不清) 我就可以满足不同的系统需求 但是它不是无限制的 我不是可以一直往上加往上加 所以肯定会有一个limit 所以在整个系统设计上面 尤其是在(听不清)或马达的设计上面 考量的东西很多 我们其实还有反馈啊 一些乱七八糟的东西 那个也很复杂 所以基本上 我们一个系列 就给大家 大概看一下 其实我们 (听不清)是有很多不同的系列的 从不同的电压到不同的(听不清) 然后控制不同的 比如说 (听不清)马达的 BODC的 BDC马达的 因为你每个马达的特性不一样 它的控制方式不一样 所以你 driver就不一样 那我们其实也有把(听不清)集成的 就是固定一些特殊应用的 比如玩具啊 它的(听不清)要求不大 那我可能就是(听不清) 内置 但是像 我刚才说的 工具 工具类的产品 它的电压变化和电流变化的 幅度是很大的 比如我做一个枪钻 和做一个电锯 你可能前端控制部分全都是一样的 但是你后端(听不清)输出的部分 可能是不一样的 所以它更多地会选用这种 没有集成(听不清)的产品 所以这个根据你设定的东西的不一样 所以它的需求和产品的定义 是不一样的 就给大家快快看一下 我们在driver上面 其实是有 很多产品 而且有很多设计理念 是考量了我们很多客户的需求以后 去做的一些产品 那实际上刚才讲的这种产品呢 回到最前面 我们刚才讲的产品实际上就是这地方 就是(听不清)这部分 那么我们没有把(听不清)和控制部分放在一起 那后面给大家介绍的东西呢 实际上是一个 另外一个理念 我们叫做集成 叫做集成的一个马达控制器 那它的 那一般来讲 大家看一下 就这个图 就是我刚才第一个图的简化 (听不清) 然后反馈 然后保护 FET 然后控制 控制就是你的主芯片 你的系统在这里 那实际上 在我们的理念里面 我们还有一种全集成 所谓全集成是什么呢 你在控制回路 你在控制主芯片的算法 其中一部分就是一个轮训的状态机 我把它拿出来 放到我的 我芯片里面去 放到我的(听不清)driver里面去 然后把后面的(听不清)也放到(听不清)driver里面去 我就会变成另外一台(听不清) 那它的好处是什么 它的好处是 对你很简化的一个系统上面 你可能就直接发一些命令给我 转速如何 怎么转 正转反转 什么时候停 什么时候开 然后转多少次以后 我停下来 就是这样的一个控制系统 那其实你没有必要花很多时间 去研究我要写多长时间的算法 我要做什么 哪些动作 我开机要转多少转 我关机要转多少转 停机的时候 我刹车要做几秒 你不用去考虑这些东西 我们有一个很简单的状态机 直接全部给你做好 所以这就是其中的一个理念 我们叫做DRV10 你在TI的网站上可以看到 刚才的那个 产品 之前的那个产品叫做DRV8 那这个把状态机放掉 叫DRV10 我们还有另外一个产品就是 放(听不清)在我的(听不清)里面 (听不清)放到外面去 那我们叫做DRV9 这个就更容易理解了 这个就是把这部分集成 那它的好处是什么呢 它的好处是 当你做 比如说 时针要求比较高的 我没办法放控制芯片加(听不清) 放在一起的 那 我可能希望就一颗芯片加 (听不清)就可以做控制了 那其实这个也是一个方向 那这种产品呢 我们现在比较 比较偏市场 我们现在主要是做一些 (听不清)集成器 就是你是一个很小的一个杆 细细的杆 前面一个头 集成 那一个大风扇 或者是做这种我刚才讲的 工具 比如枪钻啊 或者是这种动力钻啊 这种产品 我们可能更多的应用 这种产品 那 像在家电啊 像在水泵啊 这种上面 我们可能更多 其他一些理想的设计啊 包括像手机 像飞机 像其他的一些产品 可能更 更多地用这样的一个产品 像现在比较火的机器人 机器人手臂的关节 头部的转动 胸部的转动 腿的相对移动 包括 扫地机器人轮子的转动 还有它的那个板刷 就是扫地板刷的转动 可能是用上一个控制系统来控制 因为我一个系统里面有很多歌马达 我每个马达上面只要配上(听不清) 跟(听不清) 我整个控制系统 放到中间去 我中央的控制系统 有一个马达 但像这种单一的 控制的话 我们一般都是用集成的方案 所以这是给大家的一个概念 根据你的需要不同可能 你会有一些不同的选择
另外一个是做 当你在做
(听不清)的设计的时候
你会发现 你的DV处理DT的时候
就是你的电流的损耗是怎么样去减少
那一般来说 (听不清)我ARM
然后我拉回来
你的所有的输出跟你的(听不清)enable的
switch的速度和频率有关
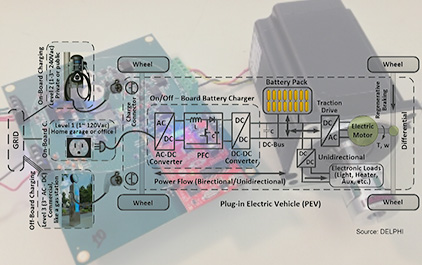
那么基本上 你可以看一下我们的这个框图
也就是说你的保护电路
你的这个(听不清)的 叫什么
和你的(听不清)本身的特性相关
也就是说 当我能够
在你的温漂和你的
控制电压 输入电压相同的时候
我的(听不清)的每一个控制的部分
都要去做一些调整
所以这个是 当你会跟到
跟到你的(听不清) 你的短路保护
的一个系统上面去
你所有的保护电路你都要重新考虑
那我们实际上在内部
现在所有的 (听不清)也好
我们集中(听不清)的整个solution来讲
我们会把保护电路全部做到内部去
包括像过流
开路 断路
低压 欠压
高压 过压
然后过流 过温
全都集成起来 以前的话 你可以要在外面加
什么相电阻啊
温度生成啊
current生成啊 包括一些
根据(听不清)要做一些电压的计算啊
这个其实 你在整个设计上面
我们会很简化地去做(听不清)的一些保护
那实际上 其实
这个就是很简单了 这个就是讲说
我们在调整(听不清)开关的时候 一定会有
一个东西 就是你的开关频率的
调整率
那这个就是一个很简化的图
就是每个不同的电流在关开
关关 然后再关关
之后再导通 有一个过程
internal的(听不清)内部和外部
(听不清)的流向的一个过程
那实际上 这样讲
如果你调整你的(听不清)driver的话
我可能通过调整外部设计的一些
电阻 或者一些电容的设置
我来调整我的开关频率 通过
(听不清)的逻辑
我去控制后面的(听不清)的开关
那其实实际上 是这样的 如果你
根据原来早的 最早设计的这种
(听不清) 你需要很小心的去匹配
这个部分的这个逻辑
因为很简单 你的(听不清)的(听不清)
跟你的(听不清)的控制是不匹配的话
那就会出现一个问题
你的(听不清)会打火花或冒烟
直接短路掉或击穿掉
就是这样简单的一个想法
就是很多人在设计马达的过程中就会发现
如果你的(听不清)的逻辑
不太完整的话 有一些小瑕疵的话
当你在用到一些极限 比如说
我开机我就可以做到9000转
马达我希望直接转到9000转
可能在开机加过压的瞬间
你的逻辑上有问题的话 你的(听不清)
到这边就会同时打开了
直接马达或(听不清)就烧掉了
所以这个在你设计过程中间
如果你做这种离散方案
或者你用这种飞机城律动绑定
或者这种费集成这种产品的话
你在设计你的开关的逻辑上面 一定要
很小心 就是很多人
拿过来接上后 就乱加一个逻辑 马达
转了 可以用了
但你换一个piece的马达 就会发现为什么这个(听不清)的这么高
甚至可能到10%
原因在哪里 就在这个逻辑上面
你的逻辑的匹配和你后面的(听不清)
和你的马达不兼容
这也就说 很多做马达的企业
我换一个批次 可能是同一个厂家
电机 因为电机是持续运行电源
它是没办法做到一致性的
它是有误差的
它的误差冗余度是多少
这个就完全取决你的客户生产的那个
那天生产的环境以及在仓储的过程中
里面性 所以这个(听不清)很大
这个是没办法被人控制的
就是我们有一个客户以前经常问我一个问题就是
他做了一个蛮好的系统 其实我觉得
他的系统蛮稳定的 而且他也调了逻辑开关
还有十分钟啊
他调了逻辑开关 然后呢
他对马达挑的很仔细
供货选了三家的(听不清)来供货
其实指标都是一样的 从(听不清)性能上
都一样 但放上去 有两家是OK的 有一家
怎么换 就是总烧
就是有问题 就是你的逻辑的部分
不是特别的理想
所以基本上 如果你仔细看的话
我来跳一跳讲 所以基本上
这个就是一个很复杂的内部框图
我刚才拆开讲了 你可以看到 其实内部的话
是一个非常复杂的框图
三线连接控制
(听不清) 外置然后整个逻辑电路和
供电系统 然后还有你的保护电路
还有你的反馈电路 全部会集成到
(听不清)driver这部分去
所以基本上 你会发现一个问题是什么
就是这个图上看起来是很复杂的
实际上在你应用的时候 会非常简单
如果你用(听不清)去驱动
电压 因为我们发现一个情况是这样
就是很多客户在做设计 我举个例子
有人做直升飞机 在场我不知道有没人做
现在天上飞的电池遥控的直升飞机
它会根据不同的 因为我们有些构造上讲
会根据不同的负载 有些带相机
有些可能带其他的东西
它只需要换后面的(听不清)就可以了
它不希望去改整个系统设计
最开始的时候 它做得是
(听不清)器件一堆搭在一起
然后换(听不清)
每次换 每次调
然后换了(听不清)以后
换(听不清)简单一点
但后来跟我讲说 我希望把(听不清)
我希望(听不清)能把上面移出去
这样我可以做更高压
我做到几百伏
这样我的高压低流 我的电池寿命
也会上去 但实际上 你在
这种应用里面 其实也不一定
就是从刚开始我讲的
(听不清)配不同的(听不清)
我就可以满足不同的系统需求
但是它不是无限制的
我不是可以一直往上加往上加
所以肯定会有一个limit
所以在整个系统设计上面
尤其是在(听不清)或马达的设计上面
考量的东西很多
我们其实还有反馈啊 一些乱七八糟的东西
那个也很复杂
所以基本上 我们一个系列 就给大家
大概看一下 其实我们
(听不清)是有很多不同的系列的
从不同的电压到不同的(听不清)
然后控制不同的 比如说
(听不清)马达的 BODC的
BDC马达的
因为你每个马达的特性不一样
它的控制方式不一样 所以你
driver就不一样
那我们其实也有把(听不清)集成的
就是固定一些特殊应用的
比如玩具啊 它的(听不清)要求不大
那我可能就是(听不清) 内置 但是像
我刚才说的 工具
工具类的产品
它的电压变化和电流变化的
幅度是很大的
比如我做一个枪钻
和做一个电锯
你可能前端控制部分全都是一样的
但是你后端(听不清)输出的部分
可能是不一样的 所以它更多地会选用这种
没有集成(听不清)的产品
所以这个根据你设定的东西的不一样
所以它的需求和产品的定义
是不一样的 就给大家快快看一下
我们在driver上面 其实是有
很多产品 而且有很多设计理念
是考量了我们很多客户的需求以后
去做的一些产品
那实际上刚才讲的这种产品呢
回到最前面
我们刚才讲的产品实际上就是这地方
就是(听不清)这部分
那么我们没有把(听不清)和控制部分放在一起
那后面给大家介绍的东西呢 实际上是一个
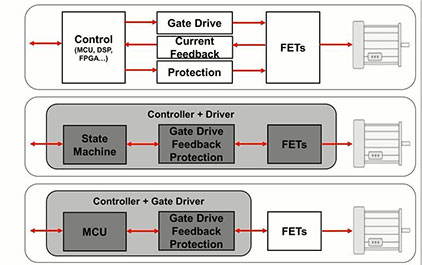
另外一个理念 我们叫做集成
叫做集成的一个马达控制器
那它的 那一般来讲
大家看一下 就这个图
就是我刚才第一个图的简化
(听不清) 然后反馈
然后保护 FET
然后控制 控制就是你的主芯片
你的系统在这里
那实际上 在我们的理念里面
我们还有一种全集成
所谓全集成是什么呢
你在控制回路 你在控制主芯片的算法
其中一部分就是一个轮训的状态机
我把它拿出来 放到我的
我芯片里面去 放到我的(听不清)driver里面去
然后把后面的(听不清)也放到(听不清)driver里面去
我就会变成另外一台(听不清)
那它的好处是什么 它的好处是
对你很简化的一个系统上面
你可能就直接发一些命令给我
转速如何 怎么转
正转反转 什么时候停 什么时候开
然后转多少次以后 我停下来
就是这样的一个控制系统
那其实你没有必要花很多时间
去研究我要写多长时间的算法
我要做什么 哪些动作
我开机要转多少转
我关机要转多少转
停机的时候 我刹车要做几秒
你不用去考虑这些东西 我们有一个很简单的状态机
直接全部给你做好
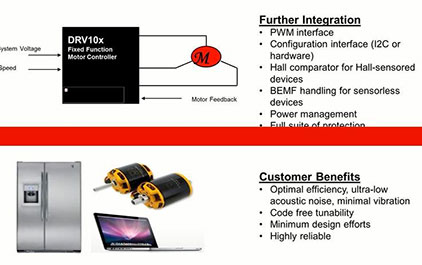
所以这就是其中的一个理念
我们叫做DRV10
你在TI的网站上可以看到 刚才的那个
产品 之前的那个产品叫做DRV8
那这个把状态机放掉 叫DRV10
我们还有另外一个产品就是
放(听不清)在我的(听不清)里面
(听不清)放到外面去
那我们叫做DRV9 这个就更容易理解了
这个就是把这部分集成
那它的好处是什么呢
它的好处是 当你做 比如说
时针要求比较高的
我没办法放控制芯片加(听不清)
放在一起的 那
我可能希望就一颗芯片加
(听不清)就可以做控制了
那其实这个也是一个方向
那这种产品呢 我们现在比较
比较偏市场
我们现在主要是做一些
(听不清)集成器
就是你是一个很小的一个杆
细细的杆 前面一个头 集成
那一个大风扇
或者是做这种我刚才讲的
工具 比如枪钻啊
或者是这种动力钻啊
这种产品 我们可能更多的应用
这种产品 那
像在家电啊
像在水泵啊
这种上面 我们可能更多
其他一些理想的设计啊
包括像手机
像飞机
像其他的一些产品 可能更
更多地用这样的一个产品
像现在比较火的机器人
机器人手臂的关节
头部的转动 胸部的转动
腿的相对移动 包括
扫地机器人轮子的转动
还有它的那个板刷
就是扫地板刷的转动
可能是用上一个控制系统来控制
因为我一个系统里面有很多歌马达
我每个马达上面只要配上(听不清)
跟(听不清) 我整个控制系统
放到中间去 我中央的控制系统
有一个马达 但像这种单一的
控制的话 我们一般都是用集成的方案
所以这是给大家的一个概念
根据你的需要不同可能
你会有一些不同的选择
另外一个是做 当你在做 (听不清)的设计的时候 你会发现 你的DV处理DT的时候 就是你的电流的损耗是怎么样去减少 那一般来说 (听不清)我ARM 然后我拉回来 你的所有的输出跟你的(听不清)enable的 switch的速度和频率有关 那么基本上 你可以看一下我们的这个框图 也就是说你的保护电路 你的这个(听不清)的 叫什么 和你的(听不清)本身的特性相关 也就是说 当我能够 在你的温漂和你的 控制电压 输入电压相同的时候 我的(听不清)的每一个控制的部分 都要去做一些调整 所以这个是 当你会跟到 跟到你的(听不清) 你的短路保护 的一个系统上面去 你所有的保护电路你都要重新考虑 那我们实际上在内部 现在所有的 (听不清)也好 我们集中(听不清)的整个solution来讲 我们会把保护电路全部做到内部去 包括像过流 开路 断路 低压 欠压 高压 过压 然后过流 过温 全都集成起来 以前的话 你可以要在外面加 什么相电阻啊 温度生成啊 current生成啊 包括一些 根据(听不清)要做一些电压的计算啊 这个其实 你在整个设计上面 我们会很简化地去做(听不清)的一些保护 那实际上 其实 这个就是很简单了 这个就是讲说 我们在调整(听不清)开关的时候 一定会有 一个东西 就是你的开关频率的 调整率 那这个就是一个很简化的图 就是每个不同的电流在关开 关关 然后再关关 之后再导通 有一个过程 internal的(听不清)内部和外部 (听不清)的流向的一个过程 那实际上 这样讲 如果你调整你的(听不清)driver的话 我可能通过调整外部设计的一些 电阻 或者一些电容的设置 我来调整我的开关频率 通过 (听不清)的逻辑 我去控制后面的(听不清)的开关 那其实实际上 是这样的 如果你 根据原来早的 最早设计的这种 (听不清) 你需要很小心的去匹配 这个部分的这个逻辑 因为很简单 你的(听不清)的(听不清) 跟你的(听不清)的控制是不匹配的话 那就会出现一个问题 你的(听不清)会打火花或冒烟 直接短路掉或击穿掉 就是这样简单的一个想法 就是很多人在设计马达的过程中就会发现 如果你的(听不清)的逻辑 不太完整的话 有一些小瑕疵的话 当你在用到一些极限 比如说 我开机我就可以做到9000转 马达我希望直接转到9000转 可能在开机加过压的瞬间 你的逻辑上有问题的话 你的(听不清) 到这边就会同时打开了 直接马达或(听不清)就烧掉了 所以这个在你设计过程中间 如果你做这种离散方案 或者你用这种飞机城律动绑定 或者这种费集成这种产品的话 你在设计你的开关的逻辑上面 一定要 很小心 就是很多人 拿过来接上后 就乱加一个逻辑 马达 转了 可以用了 但你换一个piece的马达 就会发现为什么这个(听不清)的这么高 甚至可能到10% 原因在哪里 就在这个逻辑上面 你的逻辑的匹配和你后面的(听不清) 和你的马达不兼容 这也就说 很多做马达的企业 我换一个批次 可能是同一个厂家 电机 因为电机是持续运行电源 它是没办法做到一致性的 它是有误差的 它的误差冗余度是多少 这个就完全取决你的客户生产的那个 那天生产的环境以及在仓储的过程中 里面性 所以这个(听不清)很大 这个是没办法被人控制的 就是我们有一个客户以前经常问我一个问题就是 他做了一个蛮好的系统 其实我觉得 他的系统蛮稳定的 而且他也调了逻辑开关 还有十分钟啊 他调了逻辑开关 然后呢 他对马达挑的很仔细 供货选了三家的(听不清)来供货 其实指标都是一样的 从(听不清)性能上 都一样 但放上去 有两家是OK的 有一家 怎么换 就是总烧 就是有问题 就是你的逻辑的部分 不是特别的理想 所以基本上 如果你仔细看的话 我来跳一跳讲 所以基本上 这个就是一个很复杂的内部框图 我刚才拆开讲了 你可以看到 其实内部的话 是一个非常复杂的框图 三线连接控制 (听不清) 外置然后整个逻辑电路和 供电系统 然后还有你的保护电路 还有你的反馈电路 全部会集成到 (听不清)driver这部分去 所以基本上 你会发现一个问题是什么 就是这个图上看起来是很复杂的 实际上在你应用的时候 会非常简单 如果你用(听不清)去驱动 电压 因为我们发现一个情况是这样 就是很多客户在做设计 我举个例子 有人做直升飞机 在场我不知道有没人做 现在天上飞的电池遥控的直升飞机 它会根据不同的 因为我们有些构造上讲 会根据不同的负载 有些带相机 有些可能带其他的东西 它只需要换后面的(听不清)就可以了 它不希望去改整个系统设计 最开始的时候 它做得是 (听不清)器件一堆搭在一起 然后换(听不清) 每次换 每次调 然后换了(听不清)以后 换(听不清)简单一点 但后来跟我讲说 我希望把(听不清) 我希望(听不清)能把上面移出去 这样我可以做更高压 我做到几百伏 这样我的高压低流 我的电池寿命 也会上去 但实际上 你在 这种应用里面 其实也不一定 就是从刚开始我讲的 (听不清)配不同的(听不清) 我就可以满足不同的系统需求 但是它不是无限制的 我不是可以一直往上加往上加 所以肯定会有一个limit 所以在整个系统设计上面 尤其是在(听不清)或马达的设计上面 考量的东西很多 我们其实还有反馈啊 一些乱七八糟的东西 那个也很复杂 所以基本上 我们一个系列 就给大家 大概看一下 其实我们 (听不清)是有很多不同的系列的 从不同的电压到不同的(听不清) 然后控制不同的 比如说 (听不清)马达的 BODC的 BDC马达的 因为你每个马达的特性不一样 它的控制方式不一样 所以你 driver就不一样 那我们其实也有把(听不清)集成的 就是固定一些特殊应用的 比如玩具啊 它的(听不清)要求不大 那我可能就是(听不清) 内置 但是像 我刚才说的 工具 工具类的产品 它的电压变化和电流变化的 幅度是很大的 比如我做一个枪钻 和做一个电锯 你可能前端控制部分全都是一样的 但是你后端(听不清)输出的部分 可能是不一样的 所以它更多地会选用这种 没有集成(听不清)的产品 所以这个根据你设定的东西的不一样 所以它的需求和产品的定义 是不一样的 就给大家快快看一下 我们在driver上面 其实是有 很多产品 而且有很多设计理念 是考量了我们很多客户的需求以后 去做的一些产品 那实际上刚才讲的这种产品呢 回到最前面 我们刚才讲的产品实际上就是这地方 就是(听不清)这部分 那么我们没有把(听不清)和控制部分放在一起 那后面给大家介绍的东西呢 实际上是一个 另外一个理念 我们叫做集成 叫做集成的一个马达控制器 那它的 那一般来讲 大家看一下 就这个图 就是我刚才第一个图的简化 (听不清) 然后反馈 然后保护 FET 然后控制 控制就是你的主芯片 你的系统在这里 那实际上 在我们的理念里面 我们还有一种全集成 所谓全集成是什么呢 你在控制回路 你在控制主芯片的算法 其中一部分就是一个轮训的状态机 我把它拿出来 放到我的 我芯片里面去 放到我的(听不清)driver里面去 然后把后面的(听不清)也放到(听不清)driver里面去 我就会变成另外一台(听不清) 那它的好处是什么 它的好处是 对你很简化的一个系统上面 你可能就直接发一些命令给我 转速如何 怎么转 正转反转 什么时候停 什么时候开 然后转多少次以后 我停下来 就是这样的一个控制系统 那其实你没有必要花很多时间 去研究我要写多长时间的算法 我要做什么 哪些动作 我开机要转多少转 我关机要转多少转 停机的时候 我刹车要做几秒 你不用去考虑这些东西 我们有一个很简单的状态机 直接全部给你做好 所以这就是其中的一个理念 我们叫做DRV10 你在TI的网站上可以看到 刚才的那个 产品 之前的那个产品叫做DRV8 那这个把状态机放掉 叫DRV10 我们还有另外一个产品就是 放(听不清)在我的(听不清)里面 (听不清)放到外面去 那我们叫做DRV9 这个就更容易理解了 这个就是把这部分集成 那它的好处是什么呢 它的好处是 当你做 比如说 时针要求比较高的 我没办法放控制芯片加(听不清) 放在一起的 那 我可能希望就一颗芯片加 (听不清)就可以做控制了 那其实这个也是一个方向 那这种产品呢 我们现在比较 比较偏市场 我们现在主要是做一些 (听不清)集成器 就是你是一个很小的一个杆 细细的杆 前面一个头 集成 那一个大风扇 或者是做这种我刚才讲的 工具 比如枪钻啊 或者是这种动力钻啊 这种产品 我们可能更多的应用 这种产品 那 像在家电啊 像在水泵啊 这种上面 我们可能更多 其他一些理想的设计啊 包括像手机 像飞机 像其他的一些产品 可能更 更多地用这样的一个产品 像现在比较火的机器人 机器人手臂的关节 头部的转动 胸部的转动 腿的相对移动 包括 扫地机器人轮子的转动 还有它的那个板刷 就是扫地板刷的转动 可能是用上一个控制系统来控制 因为我一个系统里面有很多歌马达 我每个马达上面只要配上(听不清) 跟(听不清) 我整个控制系统 放到中间去 我中央的控制系统 有一个马达 但像这种单一的 控制的话 我们一般都是用集成的方案 所以这是给大家的一个概念 根据你的需要不同可能 你会有一些不同的选择
另外一个是做 当你在做
(听不清)的设计的时候
你会发现 你的DV处理DT的时候
就是你的电流的损耗是怎么样去减少
那一般来说 (听不清)我ARM
然后我拉回来
你的所有的输出跟你的(听不清)enable的
switch的速度和频率有关
那么基本上 你可以看一下我们的这个框图
也就是说你的保护电路
你的这个(听不清)的 叫什么
和你的(听不清)本身的特性相关
也就是说 当我能够
在你的温漂和你的
控制电压 输入电压相同的时候
我的(听不清)的每一个控制的部分
都要去做一些调整
所以这个是 当你会跟到
跟到你的(听不清) 你的短路保护
的一个系统上面去
你所有的保护电路你都要重新考虑
那我们实际上在内部
现在所有的 (听不清)也好
我们集中(听不清)的整个solution来讲
我们会把保护电路全部做到内部去
包括像过流
开路 断路
低压 欠压
高压 过压
然后过流 过温
全都集成起来 以前的话 你可以要在外面加
什么相电阻啊
温度生成啊
current生成啊 包括一些
根据(听不清)要做一些电压的计算啊
这个其实 你在整个设计上面
我们会很简化地去做(听不清)的一些保护
那实际上 其实
这个就是很简单了 这个就是讲说
我们在调整(听不清)开关的时候 一定会有
一个东西 就是你的开关频率的
调整率
那这个就是一个很简化的图
就是每个不同的电流在关开
关关 然后再关关
之后再导通 有一个过程
internal的(听不清)内部和外部
(听不清)的流向的一个过程
那实际上 这样讲
如果你调整你的(听不清)driver的话
我可能通过调整外部设计的一些
电阻 或者一些电容的设置
我来调整我的开关频率 通过
(听不清)的逻辑
我去控制后面的(听不清)的开关
那其实实际上 是这样的 如果你
根据原来早的 最早设计的这种
(听不清) 你需要很小心的去匹配
这个部分的这个逻辑
因为很简单 你的(听不清)的(听不清)
跟你的(听不清)的控制是不匹配的话
那就会出现一个问题
你的(听不清)会打火花或冒烟
直接短路掉或击穿掉
就是这样简单的一个想法
就是很多人在设计马达的过程中就会发现
如果你的(听不清)的逻辑
不太完整的话 有一些小瑕疵的话
当你在用到一些极限 比如说
我开机我就可以做到9000转
马达我希望直接转到9000转
可能在开机加过压的瞬间
你的逻辑上有问题的话 你的(听不清)
到这边就会同时打开了
直接马达或(听不清)就烧掉了
所以这个在你设计过程中间
如果你做这种离散方案
或者你用这种飞机城律动绑定
或者这种费集成这种产品的话
你在设计你的开关的逻辑上面 一定要
很小心 就是很多人
拿过来接上后 就乱加一个逻辑 马达
转了 可以用了
但你换一个piece的马达 就会发现为什么这个(听不清)的这么高
甚至可能到10%
原因在哪里 就在这个逻辑上面
你的逻辑的匹配和你后面的(听不清)
和你的马达不兼容
这也就说 很多做马达的企业
我换一个批次 可能是同一个厂家
电机 因为电机是持续运行电源
它是没办法做到一致性的
它是有误差的
它的误差冗余度是多少
这个就完全取决你的客户生产的那个
那天生产的环境以及在仓储的过程中
里面性 所以这个(听不清)很大
这个是没办法被人控制的
就是我们有一个客户以前经常问我一个问题就是
他做了一个蛮好的系统 其实我觉得
他的系统蛮稳定的 而且他也调了逻辑开关
还有十分钟啊
他调了逻辑开关 然后呢
他对马达挑的很仔细
供货选了三家的(听不清)来供货
其实指标都是一样的 从(听不清)性能上
都一样 但放上去 有两家是OK的 有一家
怎么换 就是总烧
就是有问题 就是你的逻辑的部分
不是特别的理想
所以基本上 如果你仔细看的话
我来跳一跳讲 所以基本上
这个就是一个很复杂的内部框图
我刚才拆开讲了 你可以看到 其实内部的话
是一个非常复杂的框图
三线连接控制
(听不清) 外置然后整个逻辑电路和
供电系统 然后还有你的保护电路
还有你的反馈电路 全部会集成到
(听不清)driver这部分去
所以基本上 你会发现一个问题是什么
就是这个图上看起来是很复杂的
实际上在你应用的时候 会非常简单
如果你用(听不清)去驱动
电压 因为我们发现一个情况是这样
就是很多客户在做设计 我举个例子
有人做直升飞机 在场我不知道有没人做
现在天上飞的电池遥控的直升飞机
它会根据不同的 因为我们有些构造上讲
会根据不同的负载 有些带相机
有些可能带其他的东西
它只需要换后面的(听不清)就可以了
它不希望去改整个系统设计
最开始的时候 它做得是
(听不清)器件一堆搭在一起
然后换(听不清)
每次换 每次调
然后换了(听不清)以后
换(听不清)简单一点
但后来跟我讲说 我希望把(听不清)
我希望(听不清)能把上面移出去
这样我可以做更高压
我做到几百伏
这样我的高压低流 我的电池寿命
也会上去 但实际上 你在
这种应用里面 其实也不一定
就是从刚开始我讲的
(听不清)配不同的(听不清)
我就可以满足不同的系统需求
但是它不是无限制的
我不是可以一直往上加往上加
所以肯定会有一个limit
所以在整个系统设计上面
尤其是在(听不清)或马达的设计上面
考量的东西很多
我们其实还有反馈啊 一些乱七八糟的东西
那个也很复杂
所以基本上 我们一个系列 就给大家
大概看一下 其实我们
(听不清)是有很多不同的系列的
从不同的电压到不同的(听不清)
然后控制不同的 比如说
(听不清)马达的 BODC的
BDC马达的
因为你每个马达的特性不一样
它的控制方式不一样 所以你
driver就不一样
那我们其实也有把(听不清)集成的
就是固定一些特殊应用的
比如玩具啊 它的(听不清)要求不大
那我可能就是(听不清) 内置 但是像
我刚才说的 工具
工具类的产品
它的电压变化和电流变化的
幅度是很大的
比如我做一个枪钻
和做一个电锯
你可能前端控制部分全都是一样的
但是你后端(听不清)输出的部分
可能是不一样的 所以它更多地会选用这种
没有集成(听不清)的产品
所以这个根据你设定的东西的不一样
所以它的需求和产品的定义
是不一样的 就给大家快快看一下
我们在driver上面 其实是有
很多产品 而且有很多设计理念
是考量了我们很多客户的需求以后
去做的一些产品
那实际上刚才讲的这种产品呢
回到最前面
我们刚才讲的产品实际上就是这地方
就是(听不清)这部分
那么我们没有把(听不清)和控制部分放在一起
那后面给大家介绍的东西呢 实际上是一个
另外一个理念 我们叫做集成
叫做集成的一个马达控制器
那它的 那一般来讲
大家看一下 就这个图
就是我刚才第一个图的简化
(听不清) 然后反馈
然后保护 FET
然后控制 控制就是你的主芯片
你的系统在这里
那实际上 在我们的理念里面
我们还有一种全集成
所谓全集成是什么呢
你在控制回路 你在控制主芯片的算法
其中一部分就是一个轮训的状态机
我把它拿出来 放到我的
我芯片里面去 放到我的(听不清)driver里面去
然后把后面的(听不清)也放到(听不清)driver里面去
我就会变成另外一台(听不清)
那它的好处是什么 它的好处是
对你很简化的一个系统上面
你可能就直接发一些命令给我
转速如何 怎么转
正转反转 什么时候停 什么时候开
然后转多少次以后 我停下来
就是这样的一个控制系统
那其实你没有必要花很多时间
去研究我要写多长时间的算法
我要做什么 哪些动作
我开机要转多少转
我关机要转多少转
停机的时候 我刹车要做几秒
你不用去考虑这些东西 我们有一个很简单的状态机
直接全部给你做好
所以这就是其中的一个理念
我们叫做DRV10
你在TI的网站上可以看到 刚才的那个
产品 之前的那个产品叫做DRV8
那这个把状态机放掉 叫DRV10
我们还有另外一个产品就是
放(听不清)在我的(听不清)里面
(听不清)放到外面去
那我们叫做DRV9 这个就更容易理解了
这个就是把这部分集成
那它的好处是什么呢
它的好处是 当你做 比如说
时针要求比较高的
我没办法放控制芯片加(听不清)
放在一起的 那
我可能希望就一颗芯片加
(听不清)就可以做控制了
那其实这个也是一个方向
那这种产品呢 我们现在比较
比较偏市场
我们现在主要是做一些
(听不清)集成器
就是你是一个很小的一个杆
细细的杆 前面一个头 集成
那一个大风扇
或者是做这种我刚才讲的
工具 比如枪钻啊
或者是这种动力钻啊
这种产品 我们可能更多的应用
这种产品 那
像在家电啊
像在水泵啊
这种上面 我们可能更多
其他一些理想的设计啊
包括像手机
像飞机
像其他的一些产品 可能更
更多地用这样的一个产品
像现在比较火的机器人
机器人手臂的关节
头部的转动 胸部的转动
腿的相对移动 包括
扫地机器人轮子的转动
还有它的那个板刷
就是扫地板刷的转动
可能是用上一个控制系统来控制
因为我一个系统里面有很多歌马达
我每个马达上面只要配上(听不清)
跟(听不清) 我整个控制系统
放到中间去 我中央的控制系统
有一个马达 但像这种单一的
控制的话 我们一般都是用集成的方案
所以这是给大家的一个概念
根据你的需要不同可能
你会有一些不同的选择
手机看
扫码用手机观看
 视频简介
视频简介
TI工业马达的应用和设计-中篇
所属课程:TI工业马达的应用和设计
发布时间:2016.06.15
视频集数:3
本节视频时长:00:14:13
马达设计的思想。马达系统的应用。


 未学习 TI工业马达的应用和设计-上篇
未学习 TI工业马达的应用和设计-上篇
 未学习 TI工业马达的应用和设计-中篇
未学习 TI工业马达的应用和设计-中篇
 未学习 TI工业马达的应用和设计-下篇
未学习 TI工业马达的应用和设计-下篇



